 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMultimodal Large Language Model Driven Scenario Testing for Autonomous Vehicles
Sep 10, 2024The generation of corner cases has become increasingly crucial for efficiently testing autonomous vehicles prior to road deployment. However, existing methods struggle to accommodate diverse testing requirements and often lack the ability to generalize to unseen situations, thereby reducing the convenience and usability of the generated scenarios. A method that facilitates easily controllable scenario generation for efficient autonomous vehicles (AV) testing with realistic and challenging situations is greatly needed. To address this, we proposed OmniTester: a multimodal Large Language Model (LLM) based framework that fully leverages the extensive world knowledge and reasoning capabilities of LLMs. OmniTester is designed to generate realistic and diverse scenarios within a simulation environment, offering a robust solution for testing and evaluating AVs. In addition to prompt engineering, we employ tools from Simulation of Urban Mobility to simplify the complexity of codes generated by LLMs. Furthermore, we incorporate Retrieval-Augmented Generation and a self-improvement mechanism to enhance the LLM's understanding of scenarios, thereby increasing its ability to produce more realistic scenes. In the experiments, we demonstrated the controllability and realism of our approaches in generating three types of challenging and complex scenarios. Additionally, we showcased its effectiveness in reconstructing new scenarios described in crash report, driven by the generalization capability of LLMs.
Legal Decision-making for Highway Automated Driving
Jul 10, 2023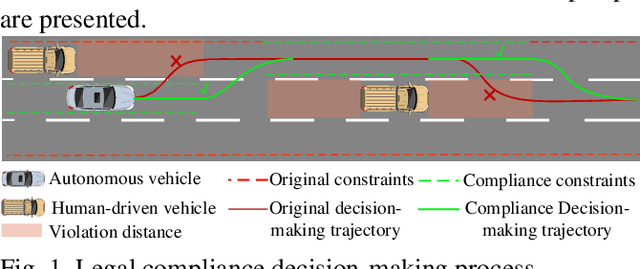
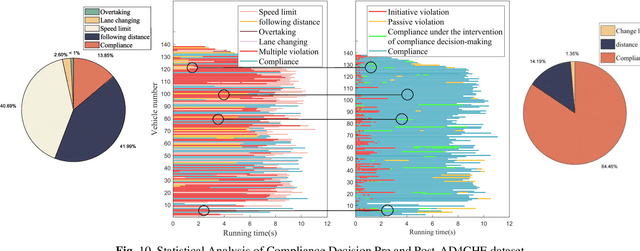
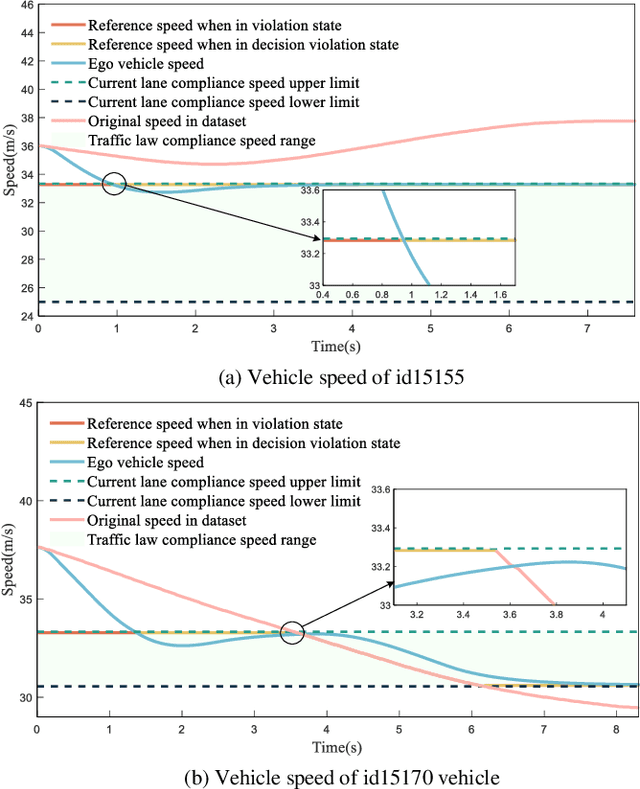
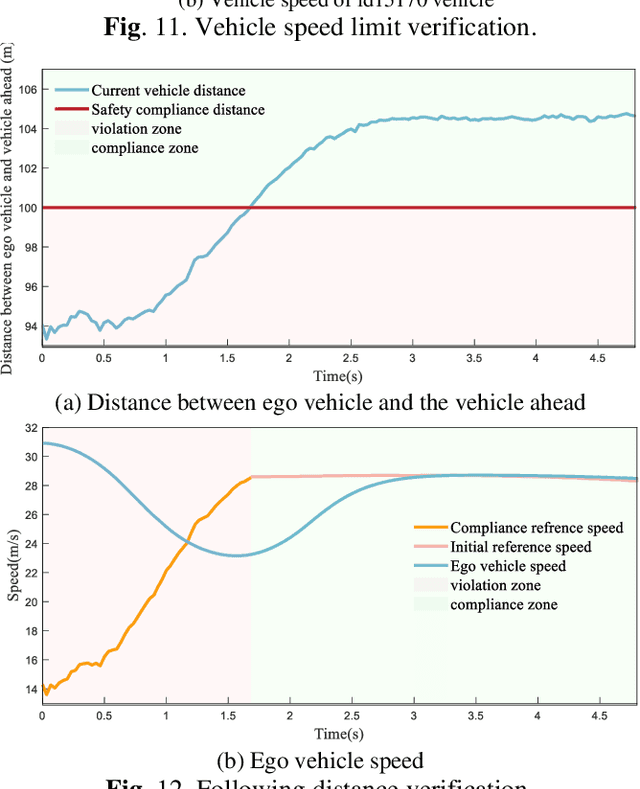
Compliance with traffic laws is a fundamental requirement for human drivers on the road, and autonomous vehicles must adhere to traffic laws as well. However, current autonomous vehicles prioritize safety and collision avoidance primarily in their decision-making and planning, which will lead to misunderstandings and distrust from human drivers and may even result in accidents in mixed traffic flow. Therefore, ensuring the compliance of the autonomous driving decision-making system is essential for ensuring the safety of autonomous driving and promoting the widespread adoption of autonomous driving technology. To this end, the paper proposes a trigger-based layered compliance decision-making framework. This framework utilizes the decision intent at the highest level as a signal to activate an online violation monitor that identifies the type of violation committed by the vehicle. Then, a four-layer architecture for compliance decision-making is employed to generate compliantly trajectories. Using this system, autonomous vehicles can detect and correct potential violations in real-time, thereby enhancing safety and building public confidence in autonomous driving technology. Finally, the proposed method is evaluated on the DJI AD4CHE highway dataset under four typical highway scenarios: speed limit, following distance, overtaking, and lane-changing. The results indicate that the proposed method increases the vehicle's overall compliance rate from 13.85% to 84.46%, while reducing the proportion of active violations to 0%, demonstrating its effectiveness.