 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRoboEvolve: Co-Evolving Planner-Simulator for Robotic Manipulation with Limited Data
May 13, 2026The scalability of robotic manipulation is fundamentally bottlenecked by the scarcity of task-aligned physical interaction data. While vision-language models (VLMs) and video generation models (VGMs) hold promise for autonomous data synthesis, they suffer from semantic-spatial misalignment and physical hallucinations, respectively. To bridge this gap, we introduce RoboEvolve, a novel framework that couples a VLM planner and a VGM simulator into a mutually reinforcing co-evolutionary loop. Operating purely on unlabeled seed images, RoboEvolve leverages a cognitive-inspired dual-phase mechanism: (i) daytime exploration fosters physically grounded behavioral discovery through a semantic-controlled multi-granular reward, and (ii) nighttime consolidation mines "near-miss" failures to stabilize policy optimization. Guided by an autonomous progressive curriculum, the system naturally scales from simple atomic actions to complex tasks. Extensive experiments demonstrate that RoboEvolve (I) achieves superior effectiveness, elevating base planners by 30 absolute points and amplifying simulator success by 48% on average; (II) exhibits extreme data efficiency, surpassing fully supervised baselines with merely 500 unlabeled seeds--a 50x reduction; and (III) demonstrates robust continual learning without catastrophic forgetting.
SegRGB-X: General RGB-X Semantic Segmentation Model
Mar 30, 2026Semantic segmentation across arbitrary sensor modalities faces significant challenges due to diverse sensor characteristics, and the traditional configurations for this task result in redundant development efforts. We address these challenges by introducing a universal arbitrary-modal semantic segmentation framework that unifies segmentation across multiple modalities. Our approach features three key innovations: (1) the Modality-aware CLIP (MA-CLIP), which provides modality-specific scene understanding guidance through LoRA fine-tuning; (2) Modality-aligned Embeddings for capturing fine-grained features; and (3) the Domain-specific Refinement Module (DSRM) for dynamic feature adjustment. Evaluated on five diverse datasets with different complementary modalities (event, thermal, depth, polarization, and light field), our model surpasses specialized multi-modal methods and achieves state-of-the-art performance with a mIoU of 65.03%. The codes will be released upon acceptance.
AgentRob: From Virtual Forum Agents to Hijacked Physical Robots
Feb 14, 2026Large Language Model (LLM)-powered autonomous agents have demonstrated significant capabilities in virtual environments, yet their integration with the physical world remains narrowly confined to direct control interfaces. We present AgentRob, a framework that bridges online community forums, LLM-powered agents, and physical robots through the Model Context Protocol (MCP). AgentRob enables a novel paradigm where autonomous agents participate in online forums--reading posts, extracting natural language commands, dispatching physical robot actions, and reporting results back to the community. The system comprises three layers: a Forum Layer providing asynchronous, persistent, multi-agent interaction; an Agent Layer with forum agents that poll for @mention-targeted commands; and a Robot Layer with VLM-driven controllers and Unitree Go2/G1 hardware that translate commands into robot primitives via iterative tool calling. The framework supports multiple concurrent agents with distinct identities and physical embodiments coexisting in the same forum, establishing the feasibility of forum-mediated multi-agent robot orchestration.
Distributed MIMO Positioning: Fundamental Limit Analysis and User Tracking Framework Design
Nov 17, 2025This paper presents a comprehensive study on the 3D positioning capabilities in distributed multiple-input multiple-output (MIMO) systems. Unlike previous studies that mainly rely on idealized isotropic antenna models, we adopt a polarimetric model that takes advantage of effective aperture distribution functions to characterize realistic antenna patterns, placements, and polarization effects. Based on this model, we analyze the fundamental limits of UE positioning using the Fisher information matrix (FIM) and the position error bound (PEB). The FIM is shown to be expressed as a weighted sum of the information contributions from individual access point (AP)-UE pairs, with each contribution interpreted geometrically across distance, azimuth, and elevation dimensions. The impact of the UE tilt and the spatial distribution of APs on the PEBs is further analyzed. As a further advancement, we propose a complete positioning framework from a UE tracking perspective. By integrating a global probability hypothesis density filter and a PEB-aware AP management strategy, the framework enables accurate tracking while optimizing AP scheduling. Finally, we present a distributed MIMO channel measurement campaign to validate the proposed framework. The results demonstrate a centimeter-level tracking accuracy. In addition, the PEB-aware AP management strategy is shown to maintain robust tracking performance while significantly reducing the number of concurrently active APs, thus lowering the overall system overhead.
3D Cooperative User Tracking for Distributed Integrated Sensing and Communication
Nov 05, 2025

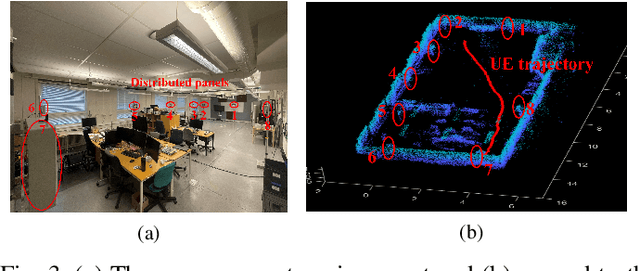

As integrated sensing and communication (ISAC) becomes an integral part of 6G networks, distributed ISAC (DISAC) is expected to enhance both sensing and communication performance through its decentralized architecture. This paper presents a complete framework to address the challenge of cooperative user tracking in DISAC systems. By incorporating a global probability hypothesis density (PHD) filter and a field-of-view-aware access point (AP) management strategy, the framework enables accurate user tracking using radio signals while optimizing AP scheduling. In addition, a real-world distributed MIMO channel measurement campaign is performed to evaluate the effectiveness of the framework. The results demonstrate that a centimeter-level root mean-square trajectory error can be achieved. Furthermore, the results show that it is not necessary to keep APs active at all times to maintain high tracking accuracy, indicating the need for robust and efficient AP management. These findings provide valuable insight into practical deployments and further development of cooperative user tracking techniques in DISAC systems.
BuildSTG: A Multi-building Energy Load Forecasting Method using Spatio-Temporal Graph Neural Network
Jul 28, 2025Due to the extensive availability of operation data, data-driven methods show strong capabilities in predicting building energy loads. Buildings with similar features often share energy patterns, reflected by spatial dependencies in their operational data, which conventional prediction methods struggle to capture. To overcome this, we propose a multi-building prediction approach using spatio-temporal graph neural networks, comprising graph representation, graph learning, and interpretation. First, a graph is built based on building characteristics and environmental factors. Next, a multi-level graph convolutional architecture with attention is developed for energy prediction. Lastly, a method interpreting the optimized graph structure is introduced. Experiments on the Building Data Genome Project 2 dataset confirm superior performance over baselines such as XGBoost, SVR, FCNN, GRU, and Naive, highlighting the method's robustness, generalization, and interpretability in capturing meaningful building similarities and spatial relationships.
Advancing high-fidelity 3D and Texture Generation with 2.5D latents
May 28, 2025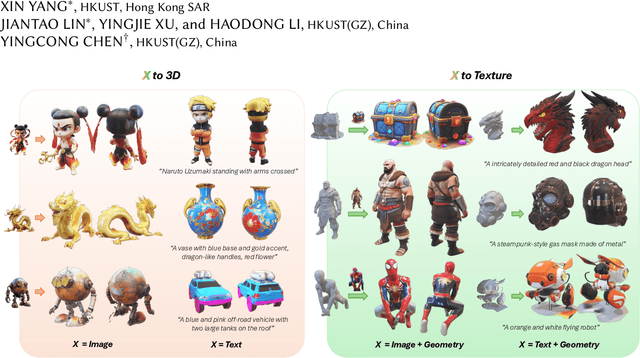
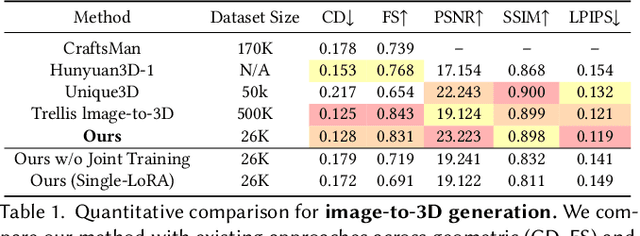
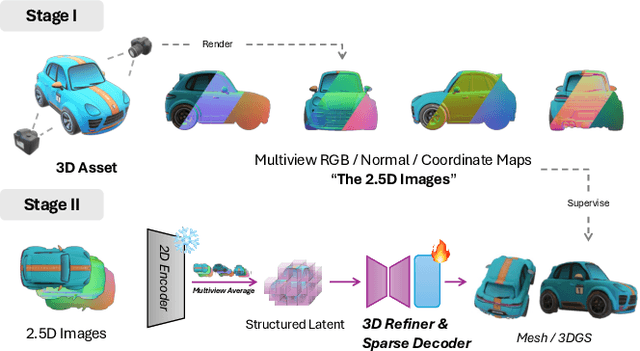
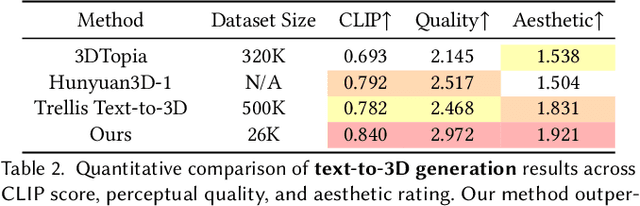
Despite the availability of large-scale 3D datasets and advancements in 3D generative models, the complexity and uneven quality of 3D geometry and texture data continue to hinder the performance of 3D generation techniques. In most existing approaches, 3D geometry and texture are generated in separate stages using different models and non-unified representations, frequently leading to unsatisfactory coherence between geometry and texture. To address these challenges, we propose a novel framework for joint generation of 3D geometry and texture. Specifically, we focus in generate a versatile 2.5D representations that can be seamlessly transformed between 2D and 3D. Our approach begins by integrating multiview RGB, normal, and coordinate images into a unified representation, termed as 2.5D latents. Next, we adapt pre-trained 2D foundation models for high-fidelity 2.5D generation, utilizing both text and image conditions. Finally, we introduce a lightweight 2.5D-to-3D refiner-decoder framework that efficiently generates detailed 3D representations from 2.5D images. Extensive experiments demonstrate that our model not only excels in generating high-quality 3D objects with coherent structure and color from text and image inputs but also significantly outperforms existing methods in geometry-conditioned texture generation.
Sparse Arrays Enable Near-Field Constant-Distance Focusing with Reduced Focal Shift
May 12, 2025In near-field beam focusing for finite-sized arrays, focal shift is a non-negligible issue. The actual focal point often appears closer to the array than the predefined focal distance, significantly degrading the focusing performance of finite aperture arrays. Moreover, when the focus point is scanned across different locations, the degradation becomes even more pronounced, leading not only to positional deviation but also to substantial energy loss. To address this issue, we revisit the problem from the perspective of communication degrees of freedom. We demonstrate that a properly designed sparse array with optimized element spacing can effectively mitigate focal shift while enabling stable control of the focusing height during beam scanning. Simulation results based on dipole antennas with different polarizations and patch antennas validate our findings. Notably, with optimized inter-element distances, the energy distribution across focal points becomes nearly uniform, and highly accurate focusing positions are achieved.
Experimental Analysis of Multipath Characteristics in Indoor Distributed Massive MIMO Channels
Apr 16, 2025



Distributed massive multiple-input multiple-output (MIMO), also known as cell-free massive MIMO, has emerged as a promising technology for sixth-generation (6G) wireless networks. This letter introduces an indoor channel measurement campaign designed to explore the behavior of multipath components (MPCs) in distributed massive MIMO channels. Fully coherent channels were measured between eight distributed uniform planar arrays (128 elements in total) and a 12-meter user equipment route. Furthermore, a method is introduced to determine the order (single- or multi-bounce) of MPC interaction by leveraging map information and MPC parameters. In addition, a Kalman filter-based framework is used for identifying the MPC interaction mechanisms (reflection or scattering/diffraction/mixed). Finally, a comprehensive MPC-level characterization is performed based on the measured channels, including the significance of the single-bounce MPCs, the spherical wavefront features, the birth-and-death processes of the MPCs, and the spatial distribution of reflections. The findings serve as a valuable reference for understanding MPC propagation behavior, which is necessary for accurate modeling of indoor distributed massive MIMO channels.
Interacting Object-Enabled Clustering and Characterization of Distributed MIMO Channels
Apr 16, 2025Distributed multiple-input multiple-output (MIMO), also known as cell-free massive MIMO, emerges as a promising technology for sixth-generation (6G) systems to support uniform coverage and reliable communication. For the design and optimization of such systems, measurement-based investigations of real-world distributed MIMO channels are essential. In this paper, we present an indoor channel measurement campaign, featuring eight distributed antenna arrays with 128 elements in total. Multi-link channels are measured at 50 positions along a 12-meter user route. A clustering algorithm enabled by interacting objects is proposed to identify clusters in the measured channels. The algorithm jointly clusters the multipath components for all links, effectively capturing the dynamic contributions of common clusters to different links. In addition, a Kalman filter-based tracking framework is introduced for cluster prediction, tracking, and updating along the user movement. Using the clustering and tracking results, cluster-level characterization of the measured channels is performed. First, the number of clusters and their visibility at both link ends are analyzed. Next, a maximum-likelihood estimator is utilized to determine the entire cluster visibility region length. Finally, key cluster-level properties, including the common cluster ratio, cluster power, shadowing, spread, among others, are statistically investigated. The results provide valuable insights into cluster behavior in typical multi-link channels, necessary for accurate modeling of distributed MIMO channels.