 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge3D Cooperative User Tracking for Distributed Integrated Sensing and Communication
Nov 05, 2025

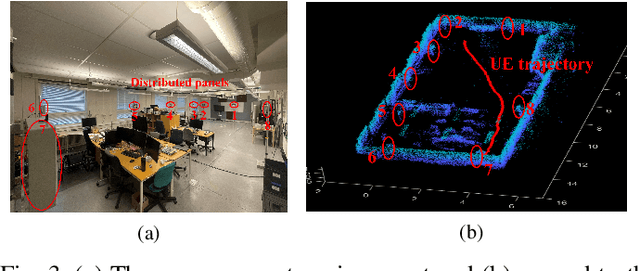

As integrated sensing and communication (ISAC) becomes an integral part of 6G networks, distributed ISAC (DISAC) is expected to enhance both sensing and communication performance through its decentralized architecture. This paper presents a complete framework to address the challenge of cooperative user tracking in DISAC systems. By incorporating a global probability hypothesis density (PHD) filter and a field-of-view-aware access point (AP) management strategy, the framework enables accurate user tracking using radio signals while optimizing AP scheduling. In addition, a real-world distributed MIMO channel measurement campaign is performed to evaluate the effectiveness of the framework. The results demonstrate that a centimeter-level root mean-square trajectory error can be achieved. Furthermore, the results show that it is not necessary to keep APs active at all times to maintain high tracking accuracy, indicating the need for robust and efficient AP management. These findings provide valuable insight into practical deployments and further development of cooperative user tracking techniques in DISAC systems.
Interacting Object-Enabled Clustering and Characterization of Distributed MIMO Channels
Apr 16, 2025Distributed multiple-input multiple-output (MIMO), also known as cell-free massive MIMO, emerges as a promising technology for sixth-generation (6G) systems to support uniform coverage and reliable communication. For the design and optimization of such systems, measurement-based investigations of real-world distributed MIMO channels are essential. In this paper, we present an indoor channel measurement campaign, featuring eight distributed antenna arrays with 128 elements in total. Multi-link channels are measured at 50 positions along a 12-meter user route. A clustering algorithm enabled by interacting objects is proposed to identify clusters in the measured channels. The algorithm jointly clusters the multipath components for all links, effectively capturing the dynamic contributions of common clusters to different links. In addition, a Kalman filter-based tracking framework is introduced for cluster prediction, tracking, and updating along the user movement. Using the clustering and tracking results, cluster-level characterization of the measured channels is performed. First, the number of clusters and their visibility at both link ends are analyzed. Next, a maximum-likelihood estimator is utilized to determine the entire cluster visibility region length. Finally, key cluster-level properties, including the common cluster ratio, cluster power, shadowing, spread, among others, are statistically investigated. The results provide valuable insights into cluster behavior in typical multi-link channels, necessary for accurate modeling of distributed MIMO channels.
Spatial separation of closely-spaced users in measured distributed massive MIMO channels
Nov 27, 2024Aiming for the sixth generation (6G) wireless communications, distributed massive multiple-input multiple-output (MIMO) systems hold significant potential for spatial multiplexing. In order to evaluate the ability of a distributed massive MIMO system to spatially separate closely spaced users, this paper presents an indoor channel measurement campaign. The measurements are carried out at a carrier frequency of 5.6 GHz with a bandwidth of 400 MHz, employing distributed antenna arrays with a total of 128 elements. Multiple scalar metrics are selected to evaluate spatial separability in line-of-sight, non line-of-sight, and mixed conditions. Firstly, through studying the singular value spread, it is shown that in line-of-sight conditions, better user orthogonality is achieved with a distributed MIMO setup compared to a co-located MIMO array. Furthermore, the dirty-paper coding (DPC) capacity and zero forcing (ZF) precoding sum-rate capacities are investigated across varying numbers of antennas and their topologies. The results show that in all three conditions, the less complex ZF precoder can be applied in distributed massive MIMO systems while still achieving a large fraction of the DPC capacity. Additionally, in line-of-sight conditions, both sum-rate capacities and user fairness benefit from more antennas and a more distributed antenna topology. However, in the given NLoS condition, the improvement in spatial separability through distributed antenna topologies is limited.
A Wideband Distributed Massive MIMO Channel Sounder for Communication and Sensing
Mar 18, 2024Channel sounding is a vital step in understanding wireless channels for the design and deployment of wireless communication systems. In this paper, we present the design and implementation of a coherent distributed massive MIMO channel sounder operating at 5-6 GHz with a bandwidth of 400 MHz based on the NI USRP X410. Through the integration of transceiver chains and RF switches, the design facilitates the use of a larger number of antennas without significant compromise in dynamic capability. Our current implementation is capable of measuring thousands of antenna combinations within tens of milliseconds. Every radio frequency switch is seamlessly integrated with a 16-element antenna array, making the antennas more practical to be transported and flexibly distributed. In addition, the channel sounder features real-time processing to reduce the data stream to the host computer and increase the signal-to-noise ratio. The design and implementation are verified through two measurements in an indoor laboratory environment. The first measurement entails a single-antenna robot as transmitter and 128 distributed receiving antennas. The second measurement demonstrates a passive sensing scenario with a walking person. We evaluate the results of both measurements using the super-resolution algorithm SAGE. The results demonstrate the great potential of the presented sounding system for providing high-quality radio channel measurements, contributing to high-resolution channel estimation, characterization, and active and passive sensing in realistic and dynamic scenarios.
An Open Dataset Storage Standard for 6G Testbeds
Nov 05, 2023


The emergence of sixth-generation (6G) networks has spurred the development of novel testbeds, including sub-THz networks, cell-free systems, and 6G simulators. To maximize the benefits of these systems, it is crucial to make the generated data publicly available and easily reusable by others. Although data sharing has become a common practice, a lack of standardization hinders data accessibility and interoperability. In this study, we propose the Dataset Storage Standard (DSS) to address these challenges by facilitating data exchange and enabling convenient processing script creation in a testbed-agnostic manner. DSS supports both experimental and simulated data, allowing researchers to employ the same processing scripts and tools across different datasets. Unlike existing standardization efforts such as SigMF and NI RF Data Recording API, DSS provides a broader scope by accommodating a common definition file for testbeds and is not limited to RF data storage. The dataset format utilizes a hierarchical structure, with a tensor representation for specific experiment scenarios. In summary, DSS offers a comprehensive and flexible framework for enhancing the FAIR principles (Findability, Accessibility, Interoperability, and Reusability) in 6G testbeds, promoting open and efficient data sharing in the research community.
High-Precision Machine-Learning Based Indoor Localization with Massive MIMO System
Mar 07, 2023High-precision cellular-based localization is one of the key technologies for next-generation communication systems. In this paper, we investigate the potential of applying machine learning (ML) to a massive multiple-input multiple-output (MIMO) system to enhance localization accuracy. We analyze a new ML-based localization pipeline that has two parallel fully connected neural networks (FCNN). The first FCNN takes the instantaneous spatial covariance matrix to capture angular information, while the second FCNN takes the channel impulse responses to capture delay information. We fuse the estimated coordinates of these two FCNNs for further accuracy improvement. To test the localization algorithm, we performed an indoor measurement campaign with a massive MIMO testbed at 3.7GHz. In the measured scenario, the proposed pipeline can achieve centimeter-level accuracy by combining delay and angular information.
The LuViRA Dataset: Measurement Description
Feb 10, 2023We present a dataset to evaluate localization algorithms, which utilizes vision, audio, and radio sensors: the Lund University Vision, Radio, and Audio (LuViRA) Dataset. The dataset includes RGB images, corresponding depth maps, IMU readings, channel response between a massive MIMO channel sounder and a user equipment, audio recorded by 12 microphones, and 0.5 mm accurate 6DoF pose ground truth. We synchronize these sensors to make sure that all data are recorded simultaneously. A camera, speaker, and transmit antenna are placed on top of a slowly moving service robot and 88 trajectories are recorded. Each trajectory includes 20 to 50 seconds of recorded sensor data and ground truth labels. The data from different sensors can be used separately or jointly to conduct localization tasks and a motion capture system is used to verify the results obtained by the localization algorithms. The main aim of this dataset is to enable research on fusing the most commonly used sensors for localization tasks. However, the full dataset or some parts of it can also be used for other research areas such as channel estimation, image classification, etc. Fusing sensor data can lead to increased localization accuracy and reliability, as well as decreased latency and power consumption. The created dataset will be made public at a later date.