 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIndoor Localization Using Radio, Vision and Audio Sensors: Real-Life Data Validation and Discussion
Sep 06, 2023
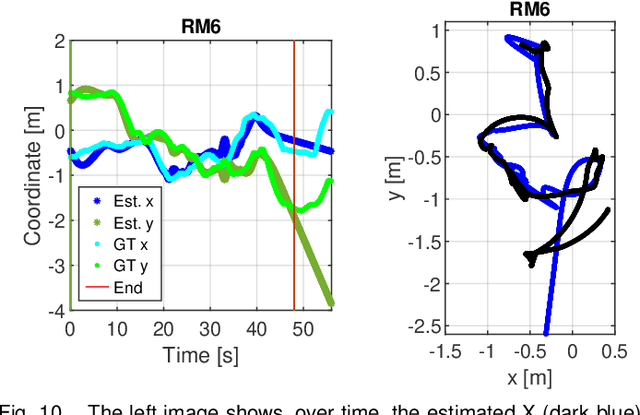
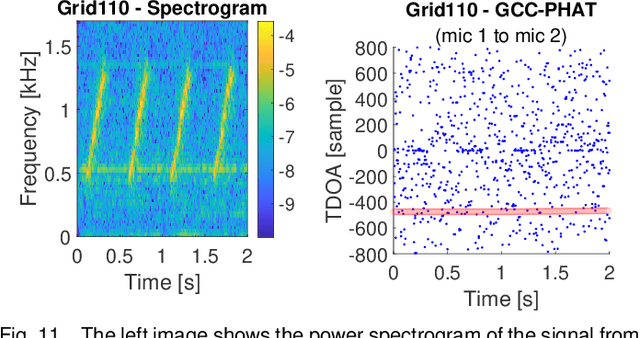

This paper investigates indoor localization methods using radio, vision, and audio sensors, respectively, in the same environment. The evaluation is based on state-of-the-art algorithms and uses a real-life dataset. More specifically, we evaluate a machine learning algorithm for radio-based localization with massive MIMO technology, an ORB-SLAM3 algorithm for vision-based localization with an RGB-D camera, and an SFS2 algorithm for audio-based localization with microphone arrays. Aspects including localization accuracy, reliability, calibration requirements, and potential system complexity are discussed to analyze the advantages and limitations of using different sensors for indoor localization tasks. The results can serve as a guideline and basis for further development of robust and high-precision multi-sensory localization systems, e.g., through sensor fusion and context and environment-aware adaptation.
The LuViRA Dataset: Measurement Description
Feb 10, 2023



We present a dataset to evaluate localization algorithms, which utilizes vision, audio, and radio sensors: the Lund University Vision, Radio, and Audio (LuViRA) Dataset. The dataset includes RGB images, corresponding depth maps, IMU readings, channel response between a massive MIMO channel sounder and a user equipment, audio recorded by 12 microphones, and 0.5 mm accurate 6DoF pose ground truth. We synchronize these sensors to make sure that all data are recorded simultaneously. A camera, speaker, and transmit antenna are placed on top of a slowly moving service robot and 88 trajectories are recorded. Each trajectory includes 20 to 50 seconds of recorded sensor data and ground truth labels. The data from different sensors can be used separately or jointly to conduct localization tasks and a motion capture system is used to verify the results obtained by the localization algorithms. The main aim of this dataset is to enable research on fusing the most commonly used sensors for localization tasks. However, the full dataset or some parts of it can also be used for other research areas such as channel estimation, image classification, etc. Fusing sensor data can lead to increased localization accuracy and reliability, as well as decreased latency and power consumption. The created dataset will be made public at a later date.
Generic Merging of Structure from Motion Maps with a Low Memory Footprint
Mar 24, 2021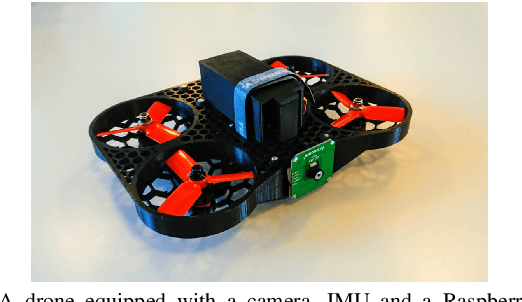
With the development of cheap image sensors, the amount of available image data have increased enormously, and the possibility of using crowdsourced collection methods has emerged. This calls for development of ways to handle all these data. In this paper, we present new tools that will enable efficient, flexible and robust map merging. Assuming that separate optimisations have been performed for the individual maps, we show how only relevant data can be stored in a low memory footprint representation. We use these representations to perform map merging so that the algorithm is invariant to the merging order and independent of the choice of coordinate system. The result is a robust algorithm that can be applied to several maps simultaneously. The result of a merge can also be represented with the same type of low-memory footprint format, which enables further merging and updating of the map in a hierarchical way. Furthermore, the method can perform loop closing and also detect changes in the scene between the capture of the different image sequences. Using both simulated and real data - from both a hand held mobile phone and from a drone - we verify the performance of the proposed method.
Trust Your IMU: Consequences of Ignoring the IMU Drift
Mar 16, 2021
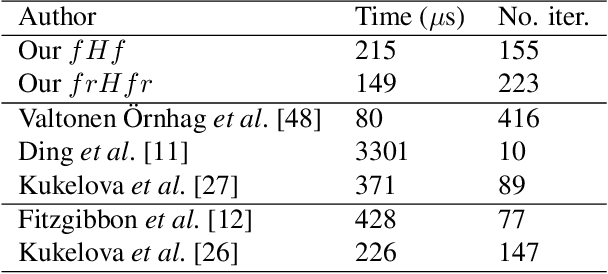
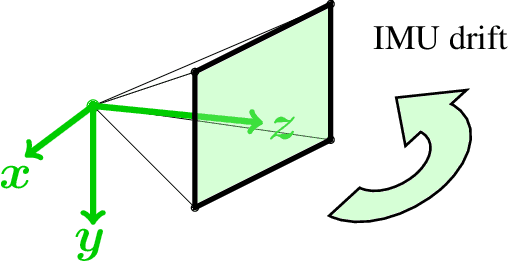
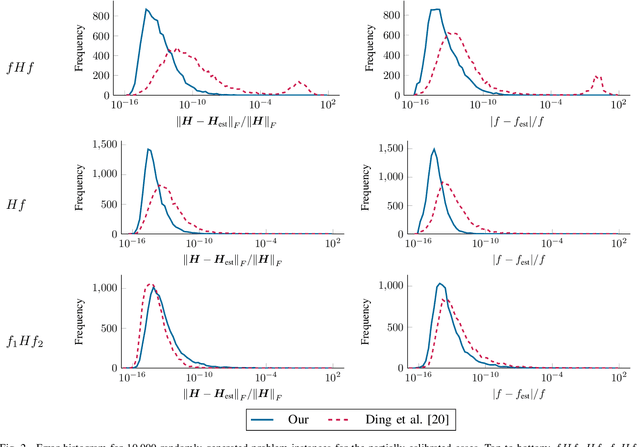
In this paper, we argue that modern pre-integration methods for inertial measurement units (IMUs) are accurate enough to ignore the drift for short time intervals. This allows us to consider a simplified camera model, which in turn admits further intrinsic calibration. We develop the first-ever solver to jointly solve the relative pose problem with unknown and equal focal length and radial distortion profile while utilizing the IMU data. Furthermore, we show significant speed-up compared to state-of-the-art algorithms, with small or negligible loss in accuracy for partially calibrated setups. The proposed algorithms are tested on both synthetic and real data, where the latter is focused on navigation using unmanned aerial vehicles (UAVs). We evaluate the proposed solvers on different commercially available low-cost UAVs, and demonstrate that the novel assumption on IMU drift is feasible in real-life applications. The extended intrinsic auto-calibration enables us to use distorted input images, making tedious calibration processes obsolete, compared to current state-of-the-art methods.
Monocular Depth Parameterizing Networks
Dec 21, 2020
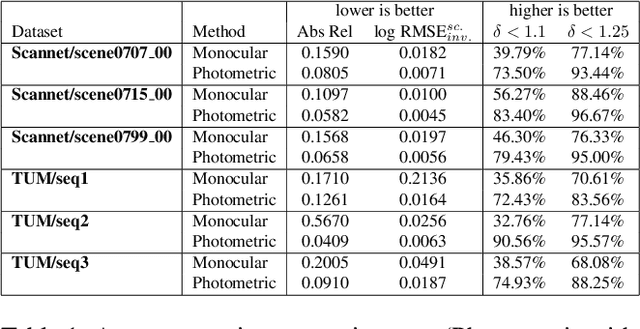
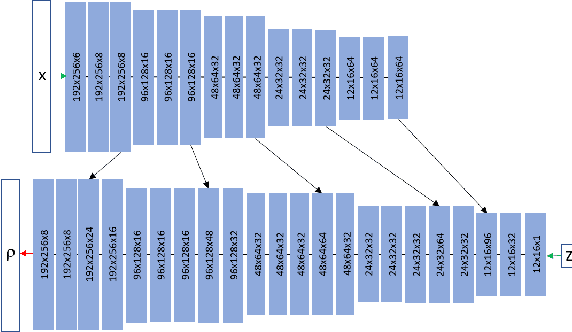
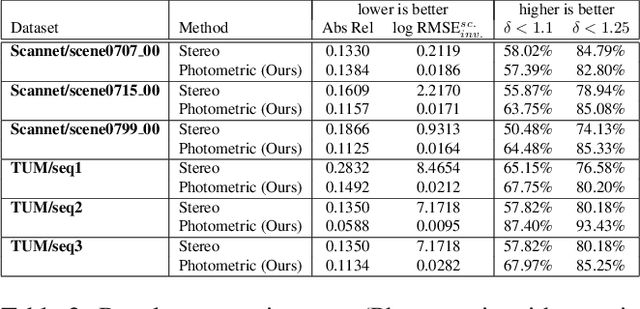
Monocular depth estimation is a highly challenging problem that is often addressed with deep neural networks. While these are able to use recognition of image features to predict reasonably looking depth maps the result often has low metric accuracy. In contrast traditional stereo methods using multiple cameras provide highly accurate estimation when pixel matching is possible. In this work we propose to combine the two approaches leveraging their respective strengths. For this purpose we propose a network structure that given an image provides a parameterization of a set of depth maps with feasible shapes. Optimizing over the parameterization then allows us to search the shapes for a photo consistent solution with respect to other images. This allows us to enforce geometric properties that are difficult to observe in single image as well as relaxes the learning problem allowing us to use relatively small networks. Our experimental evaluation shows that our method generates more accurate depth maps and generalizes better than competing state-of-the-art approaches.
Efficient Real-Time Radial Distortion Correction for UAVs
Oct 08, 2020

In this paper we present a novel algorithm for onboard radial distortion correction for unmanned aerial vehicles (UAVs) equipped with an inertial measurement unit (IMU), that runs in real-time. This approach makes calibration procedures redundant, thus allowing for exchange of optics extemporaneously. By utilizing the IMU data, the cameras can be aligned with the gravity direction. This allows us to work with fewer degrees of freedom, and opens up for further intrinsic calibration. We propose a fast and robust minimal solver for simultaneously estimating the focal length, radial distortion profile and motion parameters from homographies. The proposed solver is tested on both synthetic and real data, and perform better or on par with state-of-the-art methods relying on pre-calibration procedures.
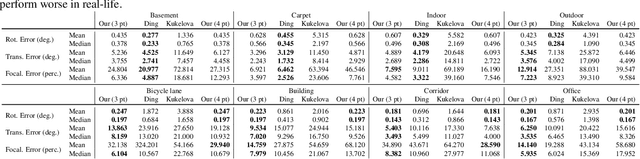
Minimal Solvers for Indoor UAV Positioning
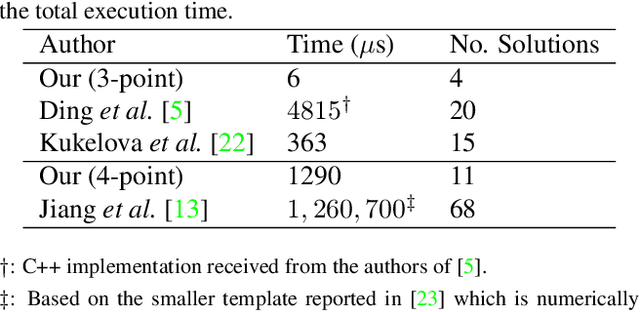
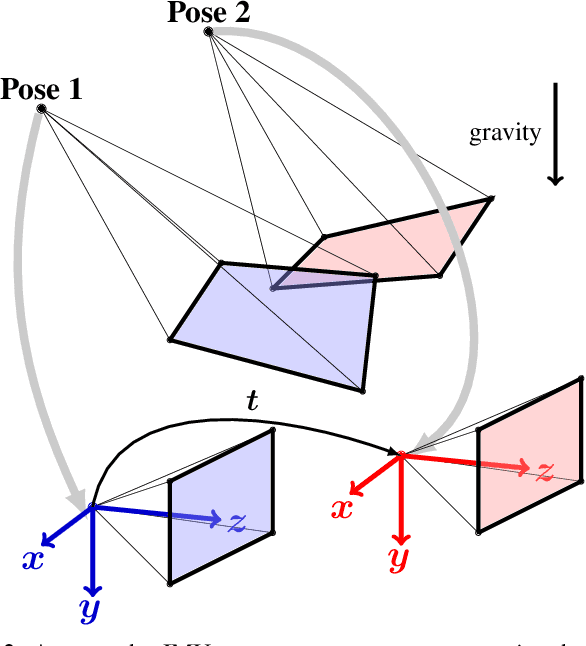
Mar 16, 2020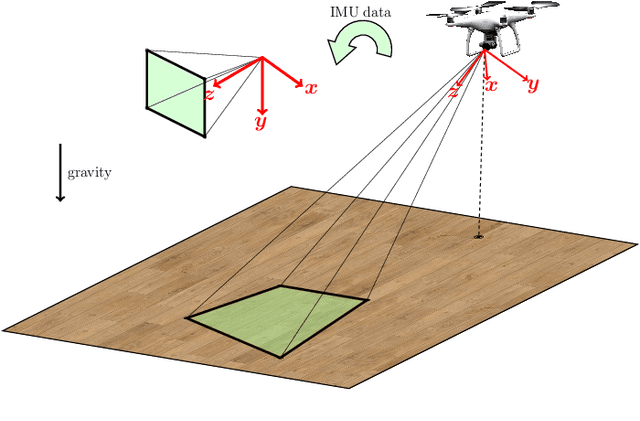


In this paper we consider a collection of relative pose problems which arise naturally in applications for visual indoor UAV navigation. We focus on cases where additional information from an onboard IMU is available and thus provides a partial extrinsic calibration through the gravitational vector. The solvers are designed for a partially calibrated camera, for a variety of realistic indoor scenarios, which makes it possible to navigate using images of the ground floor. Current state-of-the-art solvers use more general assumptions, such as using arbitrary planar structures; however, these solvers do not yield adequate reconstructions for real scenes, nor do they perform fast enough to be incorporated in real-time systems. We show that the proposed solvers enjoy better numerical stability, are faster, and require fewer point correspondences, compared to state-of-the-art solvers. These properties are vital components for robust navigation in real-time systems, and we demonstrate on both synthetic and real data that our method outperforms other methods, and yields superior motion estimation.