 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFrom Concept to Capability: Evaluating 3D Gaussian Splatting for Synthetic Scene Editing in Autonomous Driving
May 03, 2026The perception of an Autonomous Driving System (ADS) critically depends on relevant, comprehensive, and diverse datasets to ensure its safety while operating in the environment. Field data collection lacks completeness with respect to the list of rare but still possible safety-related scenarios needed for the development, verification, and validation of the ADS. 3D Gaussian Splatting (3DGS) has shown promising capabilities for the reconstruction and editing of scenes based on data collected by cameras and LiDAR sensors. However, the industrial fidelity evaluation of reconstructions is underexplored, which is crucial when employing such methods in safety-related systems, especially for ADS. This becomes more challenging as ADS operates in a dynamic, uncontrolled environment with limited viewpoints and often partially occluded objects. This paper addresses this gap by proposing and implementing a framework (Fig. 1) to systematically analyze the capabilities and limitations of 3DGS for use in the reconstruction of safety-related scenes. It focuses on the quality of reconstruction for vehicles and pedestrians, which are the two most critical object classes for ADS. Our findings provide industry insights into the fidelity degradation of reconstructions from multiple novel viewpoints, both lateral and longitudinal, enabling the integration of these methods into real-world industrial AD software development and testing pipelines.
LoMa: Local Feature Matching Revisited
Apr 06, 2026Local feature matching has long been a fundamental component of 3D vision systems such as Structure-from-Motion (SfM), yet progress has lagged behind the rapid advances of modern data-driven approaches. The newer approaches, such as feed-forward reconstruction models, have benefited extensively from scaling dataset sizes, whereas local feature matching models are still only trained on a few mid-sized datasets. In this paper, we revisit local feature matching from a data-driven perspective. In our approach, which we call LoMa, we combine large and diverse data mixtures, modern training recipes, scaled model capacity, and scaled compute, resulting in remarkable gains in performance. Since current standard benchmarks mainly rely on collecting sparse views from successful 3D reconstructions, the evaluation of progress in feature matching has been limited to relatively easy image pairs. To address the resulting saturation of benchmarks, we collect 1000 highly challenging image pairs from internet data into a new dataset called HardMatch. Ground truth correspondences for HardMatch are obtained via manual annotation by the authors. In our extensive benchmarking suite, we find that LoMa makes outstanding progress across the board, outperforming the state-of-the-art method ALIKED+LightGlue by +18.6 mAA on HardMatch, +29.5 mAA on WxBS, +21.4 (1m, 10$^\circ$) on InLoc, +24.2 AUC on RUBIK, and +12.4 mAA on IMC 2022. We release our code and models publicly at https://github.com/davnords/LoMa.
RoMa v2: Harder Better Faster Denser Feature Matching
Nov 19, 2025Dense feature matching aims to estimate all correspondences between two images of a 3D scene and has recently been established as the gold-standard due to its high accuracy and robustness. However, existing dense matchers still fail or perform poorly for many hard real-world scenarios, and high-precision models are often slow, limiting their applicability. In this paper, we attack these weaknesses on a wide front through a series of systematic improvements that together yield a significantly better model. In particular, we construct a novel matching architecture and loss, which, combined with a curated diverse training distribution, enables our model to solve many complex matching tasks. We further make training faster through a decoupled two-stage matching-then-refinement pipeline, and at the same time, significantly reduce refinement memory usage through a custom CUDA kernel. Finally, we leverage the recent DINOv3 foundation model along with multiple other insights to make the model more robust and unbiased. In our extensive set of experiments we show that the resulting novel matcher sets a new state-of-the-art, being significantly more accurate than its predecessors. Code is available at https://github.com/Parskatt/romav2
Towards Out-of-Distribution Detection for breast cancer classification in Point-of-Care Ultrasound Imaging
Feb 29, 2024Deep learning has shown to have great potential in medical applications. In critical domains as such, it is of high interest to have trustworthy algorithms which are able to tell when reliable assessments cannot be guaranteed. Detecting out-of-distribution (OOD) samples is a crucial step towards building a safe classifier. Following a previous study, showing that it is possible to classify breast cancer in point-of-care ultrasound images, this study investigates OOD detection using three different methods: softmax, energy score and deep ensembles. All methods are tested on three different OOD data sets. The results show that the energy score method outperforms the softmax method, performing well on two of the data sets. The ensemble method is the most robust, performing the best at detecting OOD samples for all three OOD data sets.
Generic Merging of Structure from Motion Maps with a Low Memory Footprint
Mar 24, 2021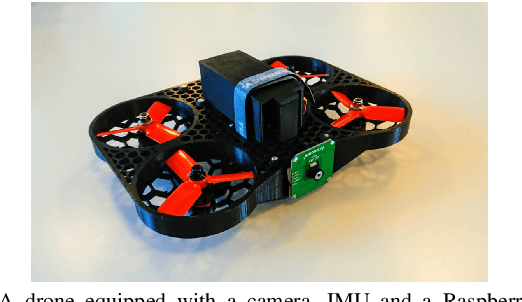
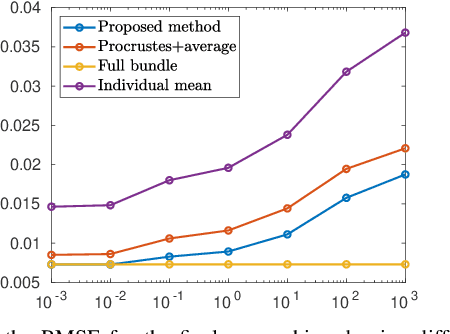
With the development of cheap image sensors, the amount of available image data have increased enormously, and the possibility of using crowdsourced collection methods has emerged. This calls for development of ways to handle all these data. In this paper, we present new tools that will enable efficient, flexible and robust map merging. Assuming that separate optimisations have been performed for the individual maps, we show how only relevant data can be stored in a low memory footprint representation. We use these representations to perform map merging so that the algorithm is invariant to the merging order and independent of the choice of coordinate system. The result is a robust algorithm that can be applied to several maps simultaneously. The result of a merge can also be represented with the same type of low-memory footprint format, which enables further merging and updating of the map in a hierarchical way. Furthermore, the method can perform loop closing and also detect changes in the scene between the capture of the different image sequences. Using both simulated and real data - from both a hand held mobile phone and from a drone - we verify the performance of the proposed method.
Trust Your IMU: Consequences of Ignoring the IMU Drift
Mar 16, 2021
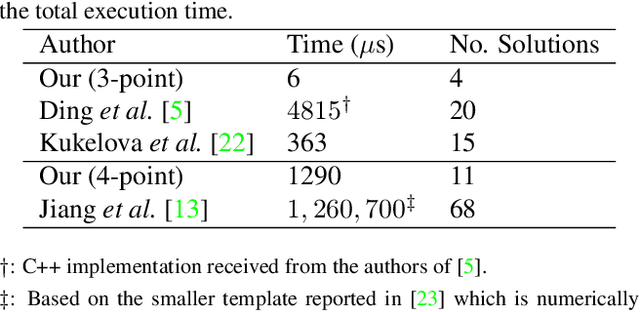
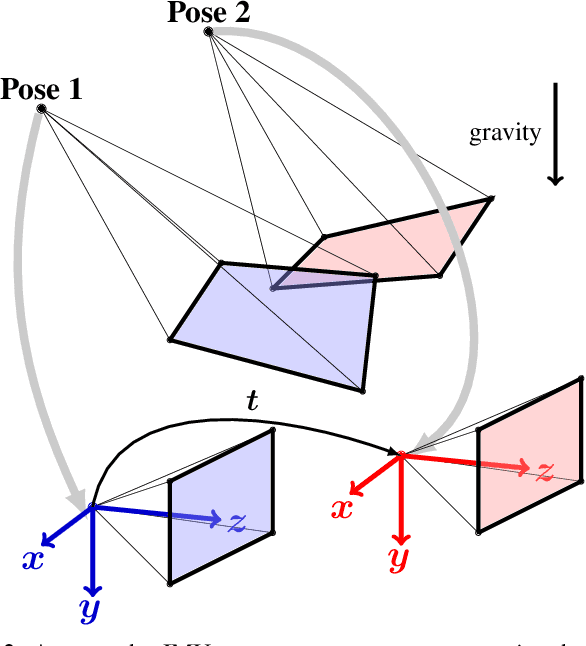
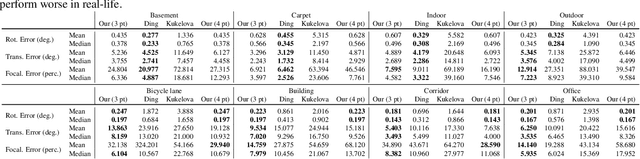
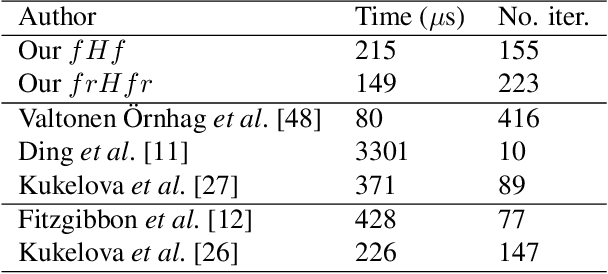
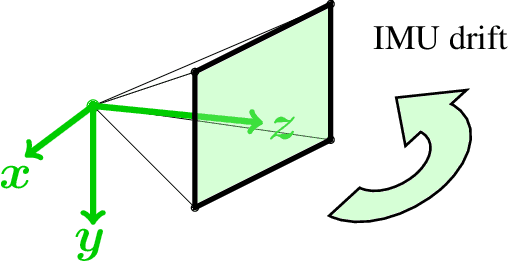
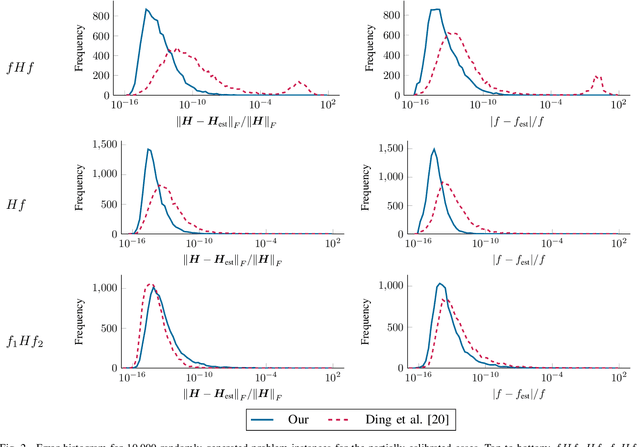
In this paper, we argue that modern pre-integration methods for inertial measurement units (IMUs) are accurate enough to ignore the drift for short time intervals. This allows us to consider a simplified camera model, which in turn admits further intrinsic calibration. We develop the first-ever solver to jointly solve the relative pose problem with unknown and equal focal length and radial distortion profile while utilizing the IMU data. Furthermore, we show significant speed-up compared to state-of-the-art algorithms, with small or negligible loss in accuracy for partially calibrated setups. The proposed algorithms are tested on both synthetic and real data, where the latter is focused on navigation using unmanned aerial vehicles (UAVs). We evaluate the proposed solvers on different commercially available low-cost UAVs, and demonstrate that the novel assumption on IMU drift is feasible in real-life applications. The extended intrinsic auto-calibration enables us to use distorted input images, making tedious calibration processes obsolete, compared to current state-of-the-art methods.
Detailed 3D Human Body Reconstruction from Multi-view Images Combining Voxel Super-Resolution and Learned Implicit Representation
Dec 11, 2020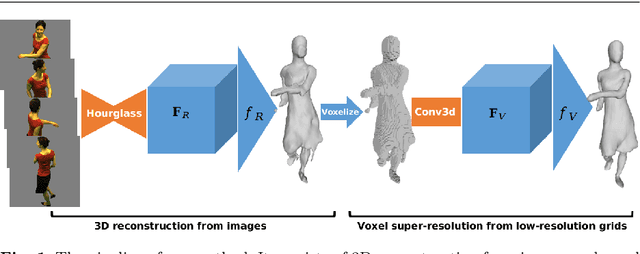



The task of reconstructing detailed 3D human body models from images is interesting but challenging in computer vision due to the high freedom of human bodies. In order to tackle the problem, we propose a coarse-to-fine method to reconstruct a detailed 3D human body from multi-view images combining voxel super-resolution based on learning the implicit representation. Firstly, the coarse 3D models are estimated by learning an implicit representation based on multi-scale features which are extracted by multi-stage hourglass networks from the multi-view images. Then, taking the low resolution voxel grids which are generated by the coarse 3D models as input, the voxel super-resolution based on an implicit representation is learned through a multi-stage 3D convolutional neural network. Finally, the refined detailed 3D human body models can be produced by the voxel super-resolution which can preserve the details and reduce the false reconstruction of the coarse 3D models. Benefiting from the implicit representation, the training process in our method is memory efficient and the detailed 3D human body produced by our method from multi-view images is the continuous decision boundary with high-resolution geometry. In addition, the coarse-to-fine method based on voxel super-resolution can remove false reconstructions and preserve the appearance details in the final reconstruction, simultaneously. In the experiments, our method quantitatively and qualitatively achieves the competitive 3D human body reconstructions from images with various poses and shapes on both the real and synthetic datasets.
A novel joint points and silhouette-based method to estimate 3D human pose and shape
Dec 11, 2020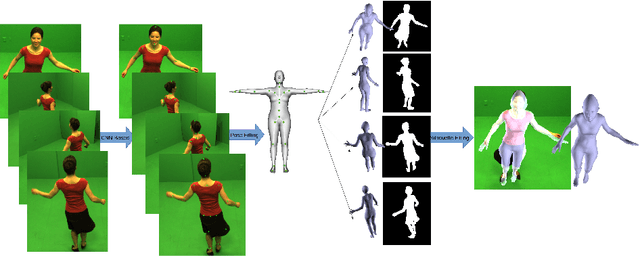
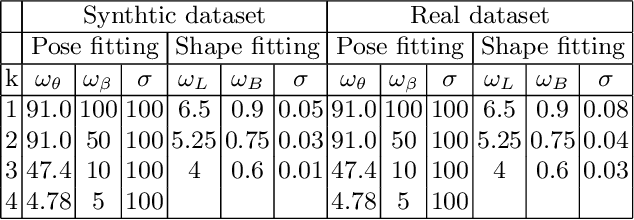
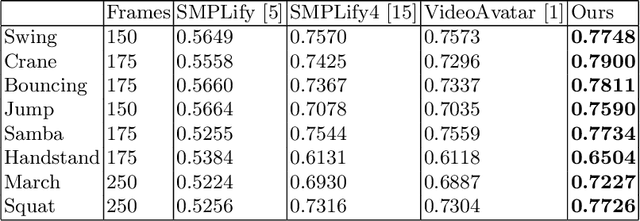
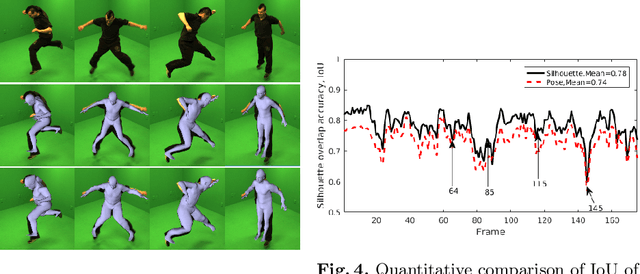
This paper presents a novel method for 3D human pose and shape estimation from images with sparse views, using joint points and silhouettes, based on a parametric model. Firstly, the parametric model is fitted to the joint points estimated by deep learning-based human pose estimation. Then, we extract the correspondence between the parametric model of pose fitting and silhouettes on 2D and 3D space. A novel energy function based on the correspondence is built and minimized to fit parametric model to the silhouettes. Our approach uses sufficient shape information because the energy function of silhouettes is built from both 2D and 3D space. This also means that our method only needs images from sparse views, which balances data used and the required prior information. Results on synthetic data and real data demonstrate the competitive performance of our approach on pose and shape estimation of the human body.
Efficient Real-Time Radial Distortion Correction for UAVs
Oct 08, 2020

In this paper we present a novel algorithm for onboard radial distortion correction for unmanned aerial vehicles (UAVs) equipped with an inertial measurement unit (IMU), that runs in real-time. This approach makes calibration procedures redundant, thus allowing for exchange of optics extemporaneously. By utilizing the IMU data, the cameras can be aligned with the gravity direction. This allows us to work with fewer degrees of freedom, and opens up for further intrinsic calibration. We propose a fast and robust minimal solver for simultaneously estimating the focal length, radial distortion profile and motion parameters from homographies. The proposed solver is tested on both synthetic and real data, and perform better or on par with state-of-the-art methods relying on pre-calibration procedures.
Minimal Solvers for Indoor UAV Positioning
Mar 16, 2020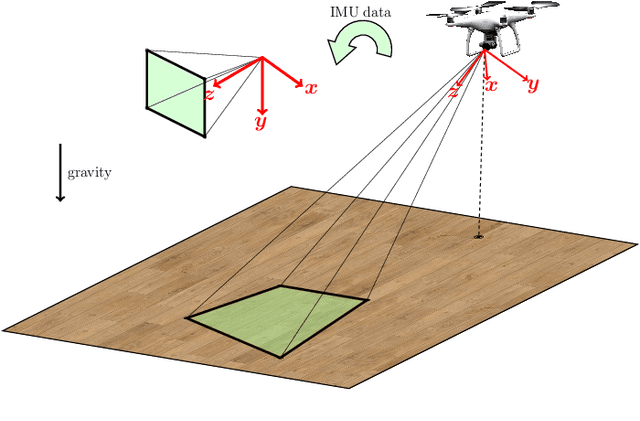


In this paper we consider a collection of relative pose problems which arise naturally in applications for visual indoor UAV navigation. We focus on cases where additional information from an onboard IMU is available and thus provides a partial extrinsic calibration through the gravitational vector. The solvers are designed for a partially calibrated camera, for a variety of realistic indoor scenarios, which makes it possible to navigate using images of the ground floor. Current state-of-the-art solvers use more general assumptions, such as using arbitrary planar structures; however, these solvers do not yield adequate reconstructions for real scenes, nor do they perform fast enough to be incorporated in real-time systems. We show that the proposed solvers enjoy better numerical stability, are faster, and require fewer point correspondences, compared to state-of-the-art solvers. These properties are vital components for robust navigation in real-time systems, and we demonstrate on both synthetic and real data that our method outperforms other methods, and yields superior motion estimation.