 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOPENTOUCH: Bringing Full-Hand Touch to Real-World Interaction
Dec 18, 2025The human hand is our primary interface to the physical world, yet egocentric perception rarely knows when, where, or how forcefully it makes contact. Robust wearable tactile sensors are scarce, and no existing in-the-wild datasets align first-person video with full-hand touch. To bridge the gap between visual perception and physical interaction, we present OpenTouch, the first in-the-wild egocentric full-hand tactile dataset, containing 5.1 hours of synchronized video-touch-pose data and 2,900 curated clips with detailed text annotations. Using OpenTouch, we introduce retrieval and classification benchmarks that probe how touch grounds perception and action. We show that tactile signals provide a compact yet powerful cue for grasp understanding, strengthen cross-modal alignment, and can be reliably retrieved from in-the-wild video queries. By releasing this annotated vision-touch-pose dataset and benchmark, we aim to advance multimodal egocentric perception, embodied learning, and contact-rich robotic manipulation.
Visual-CoG: Stage-Aware Reinforcement Learning with Chain of Guidance for Text-to-Image Generation
Aug 25, 2025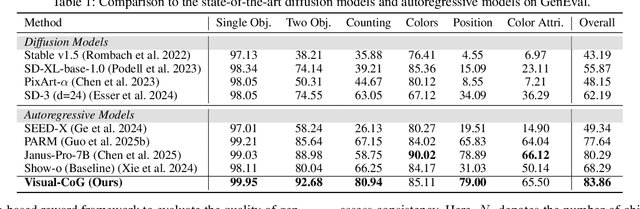
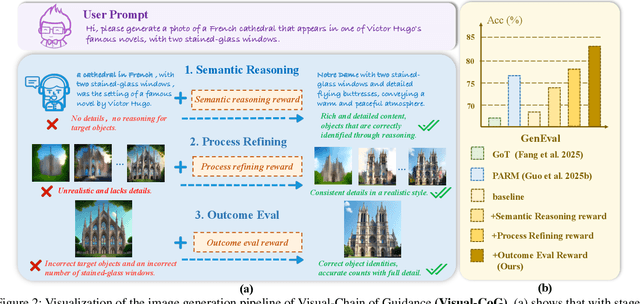
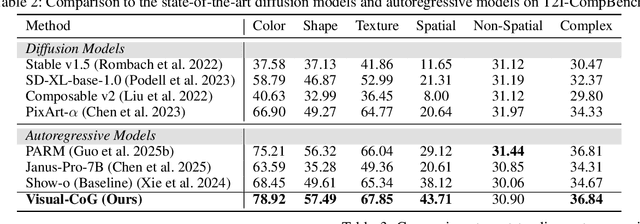
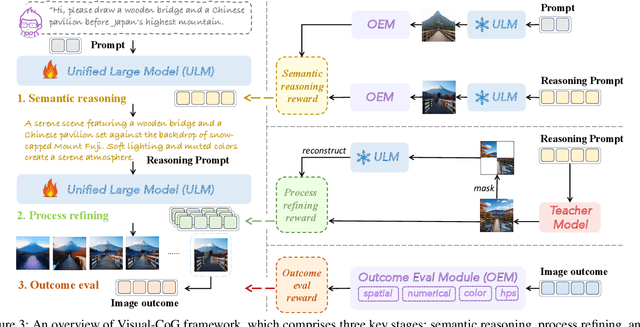
Despite the promising progress of recent autoregressive models in text-to-image (T2I) generation, their ability to handle multi-attribute and ambiguous prompts remains limited. To address these limitations, existing works have applied chain-of-thought (CoT) to enable stage-aware visual synthesis and employed reinforcement learning (RL) to improve reasoning capabilities. However, most models provide reward signals only at the end of the generation stage. This monolithic final-only guidance makes it difficult to identify which stages contribute positively to the final outcome and may lead to suboptimal policies. To tackle this issue, we propose a Visual-Chain of Guidance (Visual-CoG) paradigm consisting of three stages: semantic reasoning, process refining, and outcome evaluation, with stage-aware rewards providing immediate guidance throughout the image generation pipeline. We further construct a visual cognition benchmark, VisCog-Bench, which comprises four subtasks to evaluate the effectiveness of semantic reasoning. Comprehensive evaluations on GenEval, T2I-CompBench, and the proposed VisCog-Bench show improvements of 15%, 5%, and 19%, respectively, demonstrating the superior performance of the proposed Visual-CoG. We will release all the resources soon.
Human Machine Co-Adaptation Model and Its Convergence Analysis
Mar 10, 2025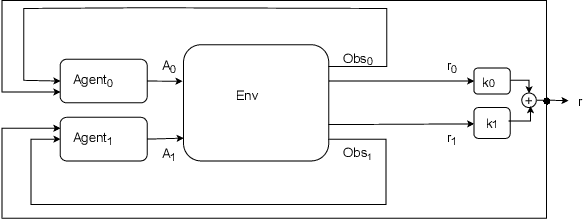
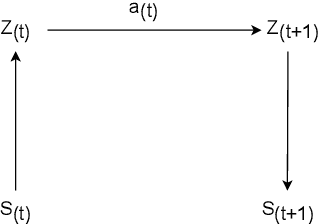
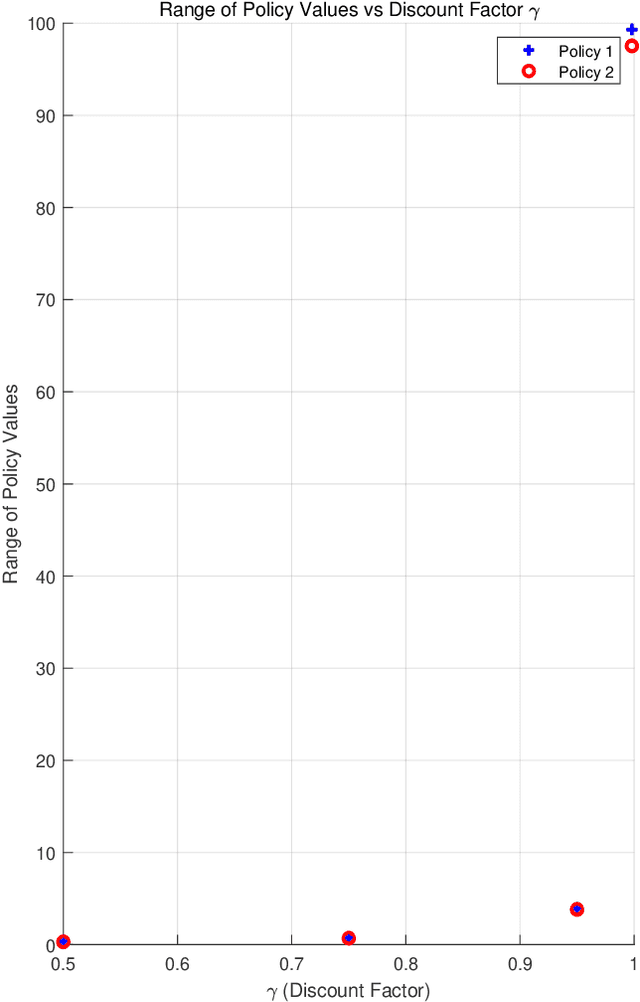

The key to robot-assisted rehabilitation lies in the design of the human-machine interface, which must accommodate the needs of both patients and machines. Current interface designs primarily focus on machine control algorithms, often requiring patients to spend considerable time adapting. In this paper, we introduce a novel approach based on the Cooperative Adaptive Markov Decision Process (CAMDPs) model to address the fundamental aspects of the interactive learning process, offering theoretical insights and practical guidance. We establish sufficient conditions for the convergence of CAMDPs and ensure the uniqueness of Nash equilibrium points. Leveraging these conditions, we guarantee the system's convergence to a unique Nash equilibrium point. Furthermore, we explore scenarios with multiple Nash equilibrium points, devising strategies to adjust both Value Evaluation and Policy Improvement algorithms to enhance the likelihood of converging to the global minimal Nash equilibrium point. Through numerical experiments, we illustrate the effectiveness of the proposed conditions and algorithms, demonstrating their applicability and robustness in practical settings. The proposed conditions for convergence and the identification of a unique optimal Nash equilibrium contribute to the development of more effective adaptive systems for human users in robot-assisted rehabilitation.
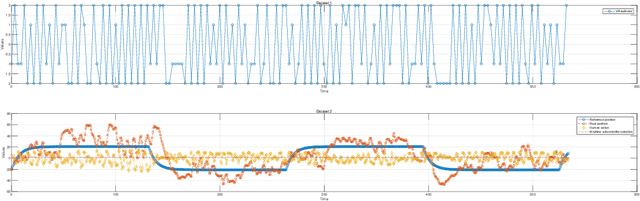
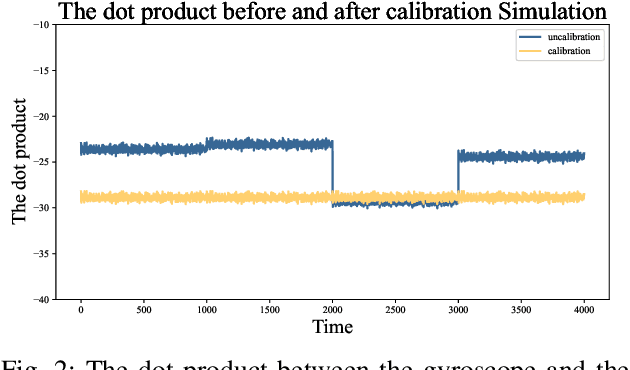
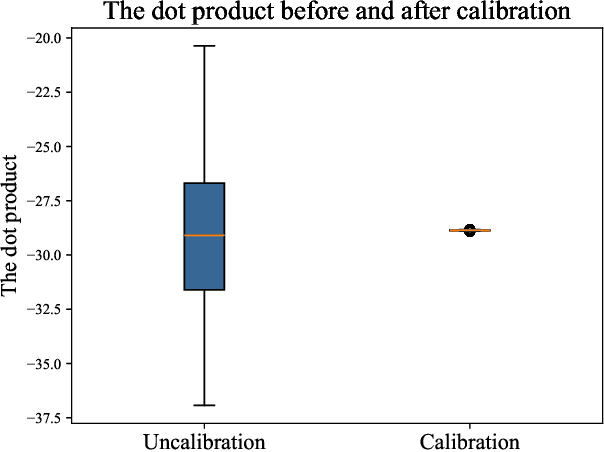
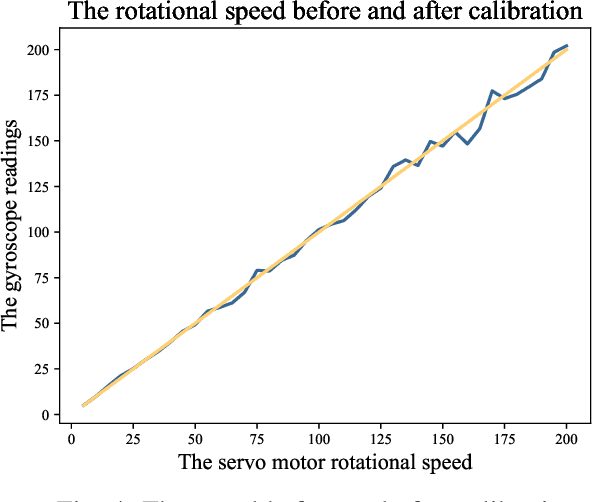
A Field Calibration Approach for Triaxial MEMS Gyroscopes Based on Gravity and Rotation Consistency
Oct 25, 2024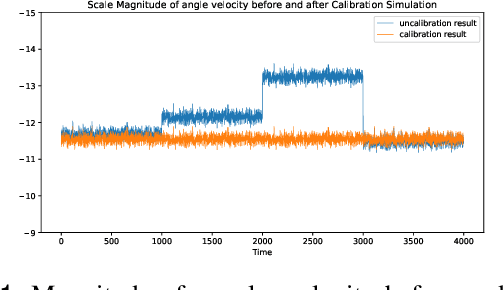
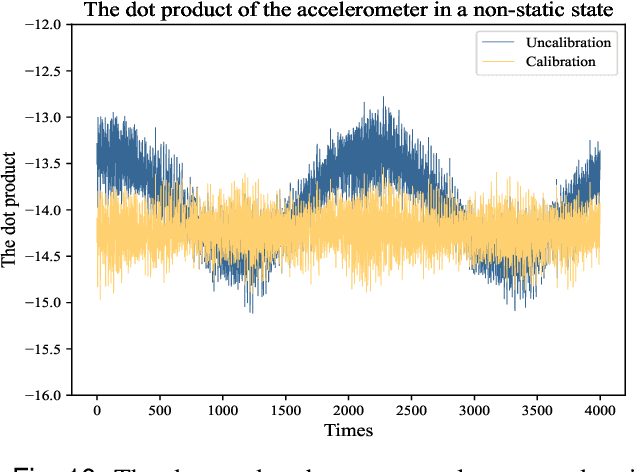
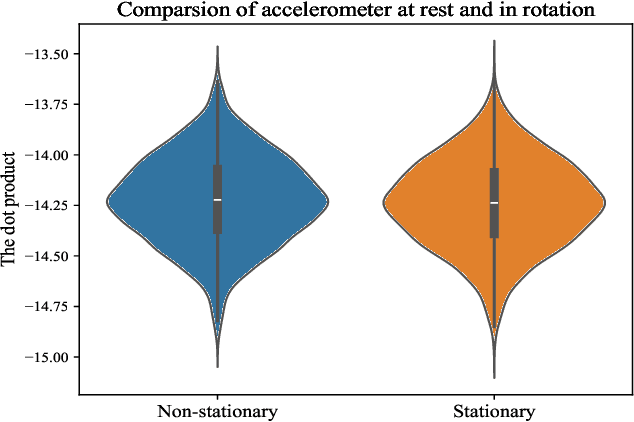
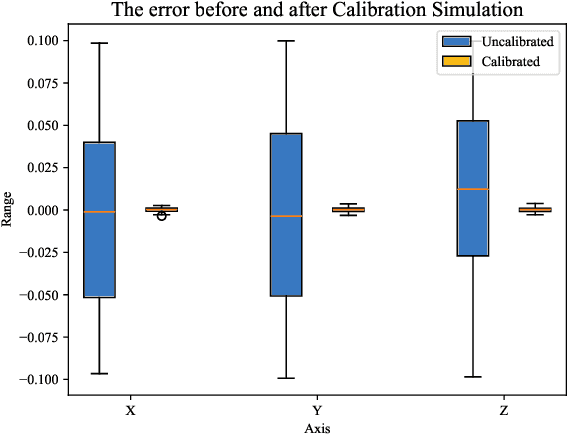
This paper developed an efficient method for calibrating triaxial MEMS gyroscopes, which can be effectively utilized in the field environment. The core strategy is to utilize the criterion that the dot product of the measured gravity and the rotation speed in a fixed frame remains constant. To eliminate the impact of external acceleration, the calibration process involves separate procedures for measuring local gravity and rotation speed. Moreover, unlike existing approaches for auto calibration of triaxial sensors that often result in nonlinear optimization problems, the proposed method simplifies the estimation of the gyroscope scale factor by employing a linear least squares algorithm. Extensive numerical simulations have been conducted to analyze the proposed method's performance in calibrating the six-parameter triaxial gyroscope model, taking into consideration measurements corrupted by simulated noise. Experimental validation was also carried out using two commercially available MEMS inertial measurement units (LSM9DS1) and a servo motor. The experimental results effectively demonstrate the efficacy of the proposed calibration approach.
Human-Machine Co-Adaptation for Robot-Assisted Rehabilitation via Dual-Agent Multiple Model Reinforcement Learning (DAMMRL)
Jul 31, 2024
This study introduces a novel approach to robot-assisted ankle rehabilitation by proposing a Dual-Agent Multiple Model Reinforcement Learning (DAMMRL) framework, leveraging multiple model adaptive control (MMAC) and co-adaptive control strategies. In robot-assisted rehabilitation, one of the key challenges is modelling human behaviour due to the complexity of human cognition and physiological systems. Traditional single-model approaches often fail to capture the dynamics of human-machine interactions. Our research employs a multiple model strategy, using simple sub-models to approximate complex human responses during rehabilitation tasks, tailored to varying levels of patient incapacity. The proposed system's versatility is demonstrated in real experiments and simulated environments. Feasibility and potential were evaluated with 13 healthy young subjects, yielding promising results that affirm the anticipated benefits of the approach. This study not only introduces a new paradigm for robot-assisted ankle rehabilitation but also opens the way for future research in adaptive, patient-centred therapeutic interventions.
Uni-Mol Docking V2: Towards Realistic and Accurate Binding Pose Prediction
May 20, 2024



In recent years, machine learning (ML) methods have emerged as promising alternatives for molecular docking, offering the potential for high accuracy without incurring prohibitive computational costs. However, recent studies have indicated that these ML models may overfit to quantitative metrics while neglecting the physical constraints inherent in the problem. In this work, we present Uni-Mol Docking V2, which demonstrates a remarkable improvement in performance, accurately predicting the binding poses of 77+% of ligands in the PoseBusters benchmark with an RMSD value of less than 2.0 {\AA}, and 75+% passing all quality checks. This represents a significant increase from the 62% achieved by the previous Uni-Mol Docking model. Notably, our Uni-Mol Docking approach generates chemically accurate predictions, circumventing issues such as chirality inversions and steric clashes that have plagued previous ML models. Furthermore, we observe enhanced performance in terms of high-quality predictions (RMSD values of less than 1.0 {\AA} and 1.5 {\AA}) and physical soundness when Uni-Mol Docking is combined with more physics-based methods like Uni-Dock. Our results represent a significant advancement in the application of artificial intelligence for scientific research, adopting a holistic approach to ligand docking that is well-suited for industrial applications in virtual screening and drug design. The code, data and service for Uni-Mol Docking are publicly available for use and further development in https://github.com/dptech-corp/Uni-Mol.
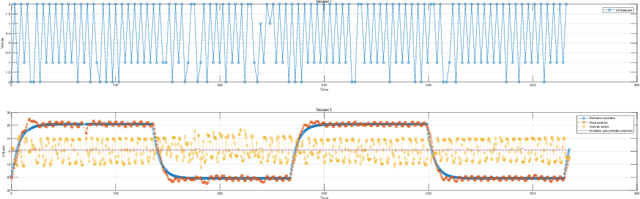
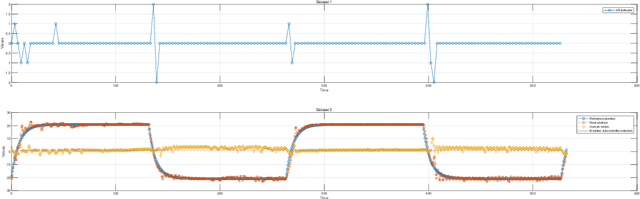
On-site scale factor linearity calibration of MEMS triaxial gyroscopes
May 06, 2024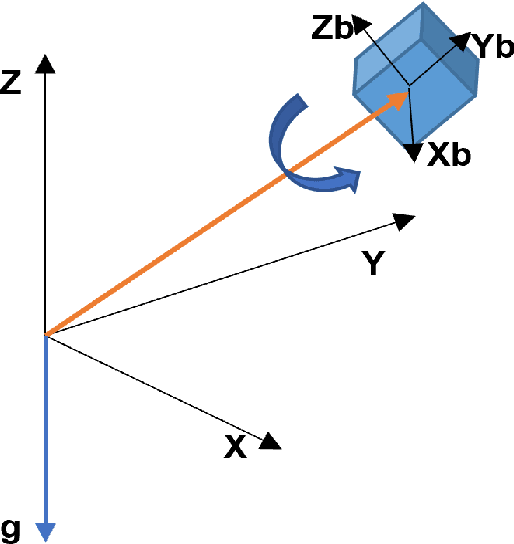
The calibration of MEMS triaxial gyroscopes is crucial for achieving precise attitude estimation for various wearable health monitoring applications. However, gyroscope calibration poses greater challenges compared to accelerometers and magnetometers. This paper introduces an efficient method for calibrating MEMS triaxial gyroscopes via only a servo motor, making it well-suited for field environments. The core strategy of the method involves utilizing the fact that the dot product of the measured gravity and the rotational speed in a fixed frame remains constant. To eliminate the influence of rotating centrifugal force on the accelerometer, the accelerometer data is measured while stationary. The proposed calibration experiment scheme, which allows gyroscopic measurements when operating each axis at a specific rotation speed, making it easier to evaluate the linearity across a related speed range constituted by a series of rotation speeds. Moreover, solely the classical least squares algorithm proves adequate for estimating the scale factor, notably streamlining the analysis of the calibration process. Extensive numerical simulations were conducted to analyze the proposed method's performance in calibrating a triaxial gyroscope model. Experimental validation was also carried out using a commercially available MEMS inertial measurement unit (LSM9DS1 from Arduino nano 33 BLE SENSE) and a servo motor capable of controlling precise speed. The experimental results effectively demonstrate the efficacy of the proposed calibration approach.
SciAssess: Benchmarking LLM Proficiency in Scientific Literature Analysis
Mar 15, 2024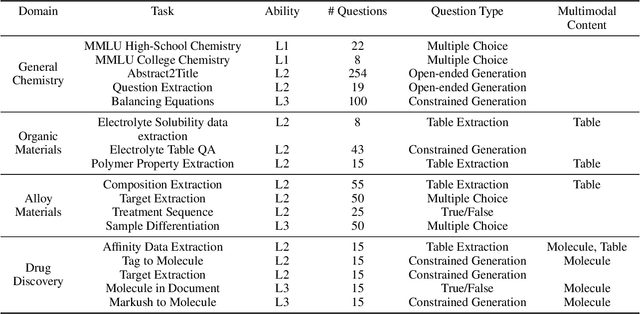

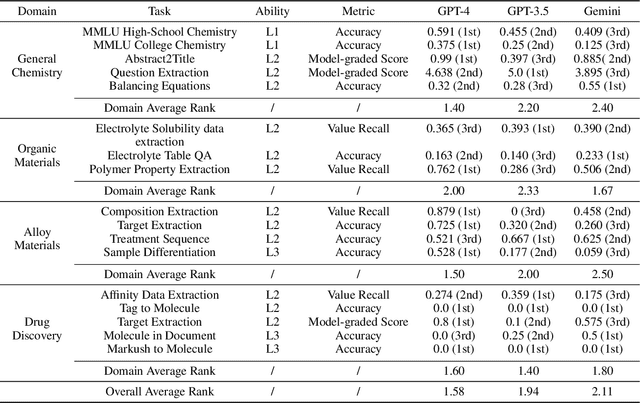
Recent breakthroughs in Large Language Models (LLMs) have revolutionized natural language understanding and generation, igniting a surge of interest in leveraging these technologies in the field of scientific literature analysis. Existing benchmarks, however, inadequately evaluate the proficiency of LLMs in scientific literature analysis, especially in scenarios involving complex comprehension and multimodal data. In response, we introduced SciAssess, a benchmark tailored for the in-depth analysis of scientific literature, crafted to provide a thorough assessment of LLMs' efficacy. SciAssess focuses on evaluating LLMs' abilities in memorization, comprehension, and analysis within the context of scientific literature analysis. It includes representative tasks from diverse scientific fields, such as general chemistry, organic materials, and alloy materials. And rigorous quality control measures ensure its reliability in terms of correctness, anonymization, and copyright compliance. SciAssess evaluates leading LLMs, including GPT-4, GPT-3.5, and Gemini, identifying their strengths and aspects for improvement and supporting the ongoing development of LLM applications in scientific literature analysis. SciAssess and its resources are made available at https://sci-assess.github.io, offering a valuable tool for advancing LLM capabilities in scientific literature analysis.
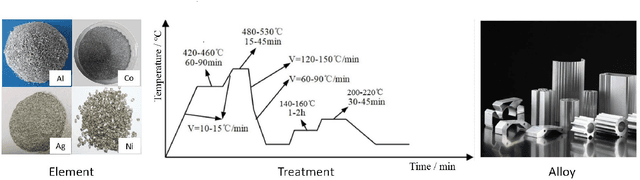
Uni-SMART: Universal Science Multimodal Analysis and Research Transformer
Mar 15, 2024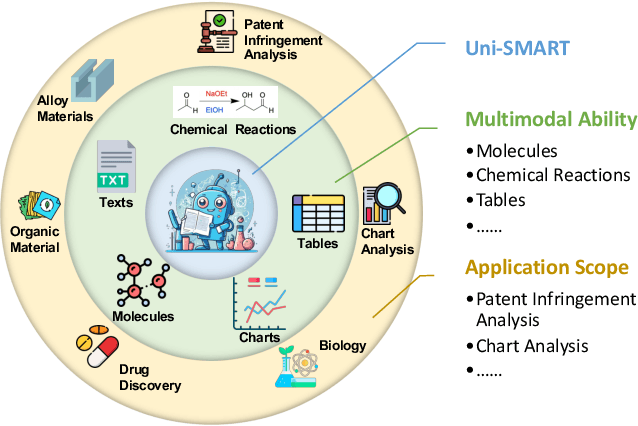
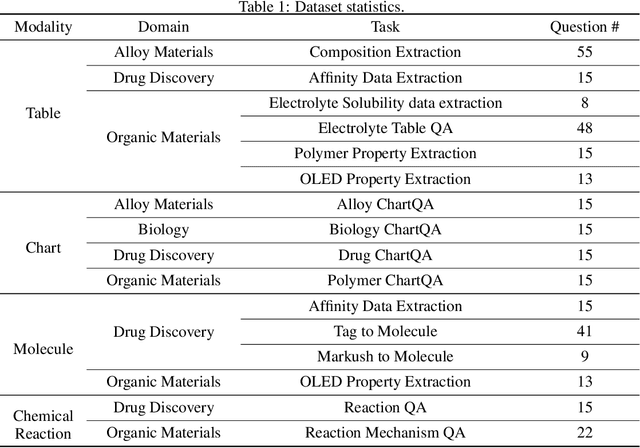
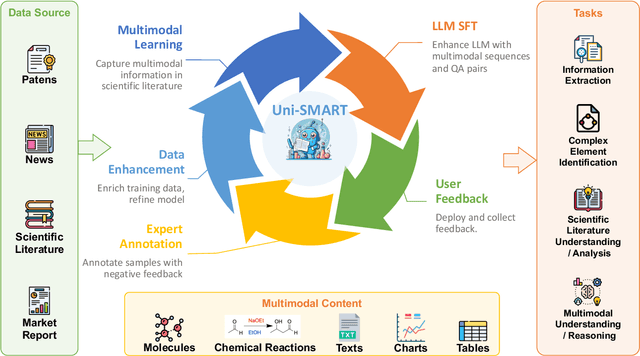
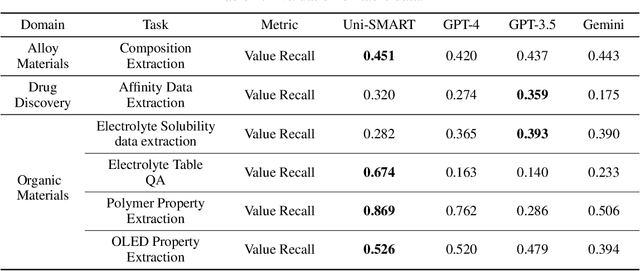
In scientific research and its application, scientific literature analysis is crucial as it allows researchers to build on the work of others. However, the fast growth of scientific knowledge has led to a massive increase in scholarly articles, making in-depth literature analysis increasingly challenging and time-consuming. The emergence of Large Language Models (LLMs) has offered a new way to address this challenge. Known for their strong abilities in summarizing texts, LLMs are seen as a potential tool to improve the analysis of scientific literature. However, existing LLMs have their own limits. Scientific literature often includes a wide range of multimodal elements, such as molecular structure, tables, and charts, which are hard for text-focused LLMs to understand and analyze. This issue points to the urgent need for new solutions that can fully understand and analyze multimodal content in scientific literature. To answer this demand, we present Uni-SMART (Universal Science Multimodal Analysis and Research Transformer), an innovative model designed for in-depth understanding of multimodal scientific literature. Through rigorous quantitative evaluation across several domains, Uni-SMART demonstrates superior performance over leading text-focused LLMs. Furthermore, our exploration extends to practical applications, including patent infringement detection and nuanced analysis of charts. These applications not only highlight Uni-SMART's adaptability but also its potential to revolutionize how we interact with scientific literature.
Multi-level protein pre-training with Vabs-Net
Feb 05, 2024In recent years, there has been a surge in the development of 3D structure-based pre-trained protein models, representing a significant advancement over pre-trained protein language models in various downstream tasks. However, most existing structure-based pre-trained models primarily focus on the residue level, i.e., alpha carbon atoms, while ignoring other atoms like side chain atoms. We argue that modeling proteins at both residue and atom levels is important since the side chain atoms can also be crucial for numerous downstream tasks, for example, molecular docking. Nevertheless, we find that naively combining residue and atom information during pre-training typically fails. We identify a key reason is the information leakage caused by the inclusion of atom structure in the input, which renders residue-level pre-training tasks trivial and results in insufficiently expressive residue representations. To address this issue, we introduce a span mask pre-training strategy on 3D protein chains to learn meaningful representations of both residues and atoms. This leads to a simple yet effective approach to learning protein representation suitable for diverse downstream tasks. Extensive experimental results on binding site prediction and function prediction tasks demonstrate our proposed pre-training approach significantly outperforms other methods. Our code will be made public.