 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Field Calibration Approach for Triaxial MEMS Gyroscopes Based on Gravity and Rotation Consistency
Paper and Code
Oct 25, 2024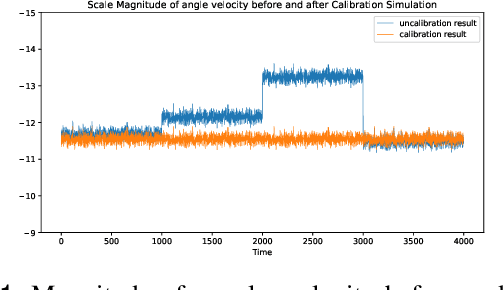
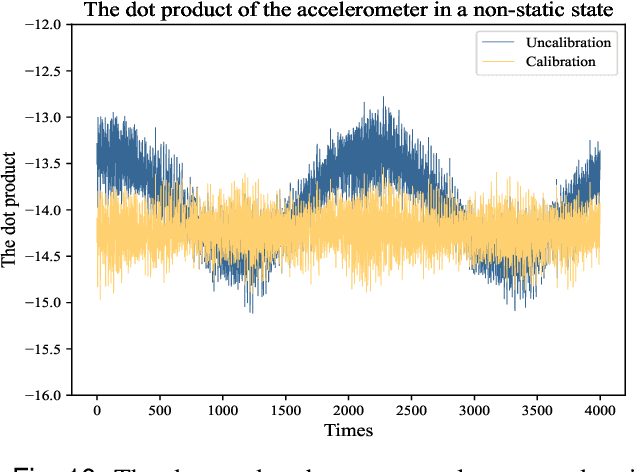
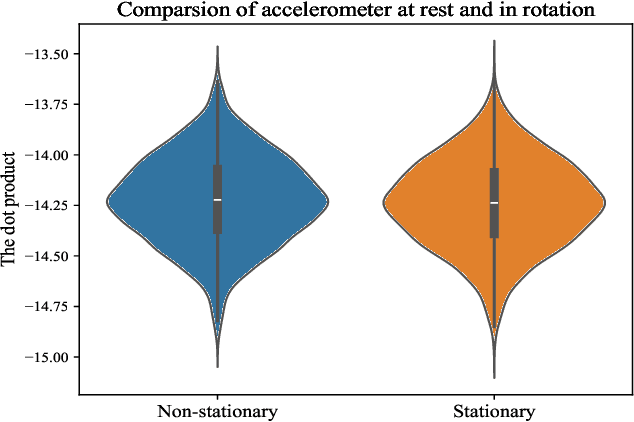
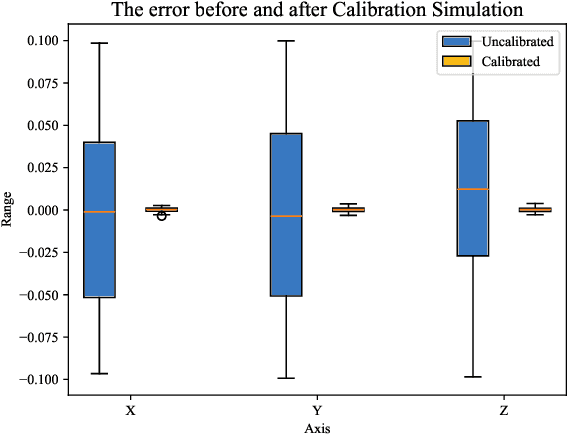
This paper developed an efficient method for calibrating triaxial MEMS gyroscopes, which can be effectively utilized in the field environment. The core strategy is to utilize the criterion that the dot product of the measured gravity and the rotation speed in a fixed frame remains constant. To eliminate the impact of external acceleration, the calibration process involves separate procedures for measuring local gravity and rotation speed. Moreover, unlike existing approaches for auto calibration of triaxial sensors that often result in nonlinear optimization problems, the proposed method simplifies the estimation of the gyroscope scale factor by employing a linear least squares algorithm. Extensive numerical simulations have been conducted to analyze the proposed method's performance in calibrating the six-parameter triaxial gyroscope model, taking into consideration measurements corrupted by simulated noise. Experimental validation was also carried out using two commercially available MEMS inertial measurement units (LSM9DS1) and a servo motor. The experimental results effectively demonstrate the efficacy of the proposed calibration approach.