 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHuman Machine Co-Adaptation Model and Its Convergence Analysis
Mar 10, 2025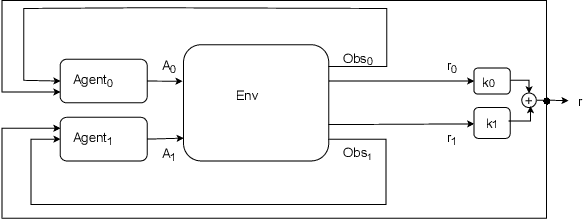
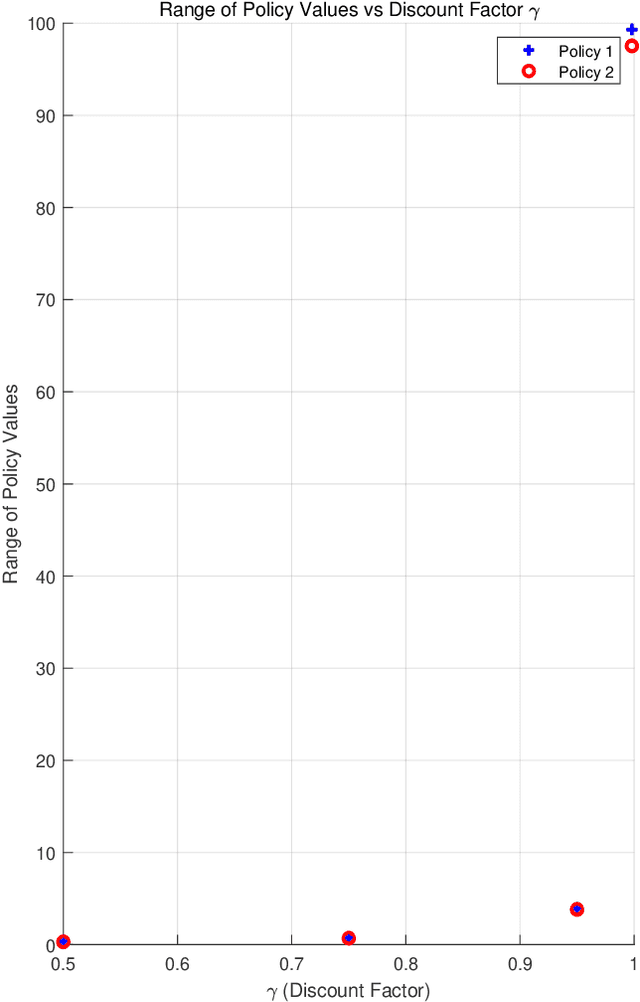

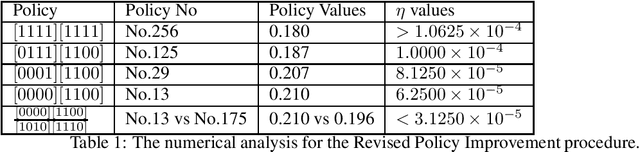
The key to robot-assisted rehabilitation lies in the design of the human-machine interface, which must accommodate the needs of both patients and machines. Current interface designs primarily focus on machine control algorithms, often requiring patients to spend considerable time adapting. In this paper, we introduce a novel approach based on the Cooperative Adaptive Markov Decision Process (CAMDPs) model to address the fundamental aspects of the interactive learning process, offering theoretical insights and practical guidance. We establish sufficient conditions for the convergence of CAMDPs and ensure the uniqueness of Nash equilibrium points. Leveraging these conditions, we guarantee the system's convergence to a unique Nash equilibrium point. Furthermore, we explore scenarios with multiple Nash equilibrium points, devising strategies to adjust both Value Evaluation and Policy Improvement algorithms to enhance the likelihood of converging to the global minimal Nash equilibrium point. Through numerical experiments, we illustrate the effectiveness of the proposed conditions and algorithms, demonstrating their applicability and robustness in practical settings. The proposed conditions for convergence and the identification of a unique optimal Nash equilibrium contribute to the development of more effective adaptive systems for human users in robot-assisted rehabilitation.
Human Machine Co-adaption Interface via Cooperation Markov Decision Process System
May 03, 2023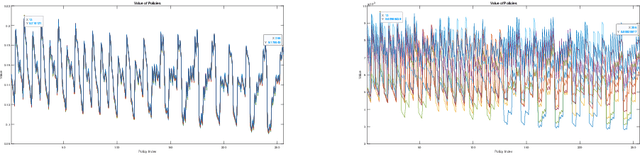
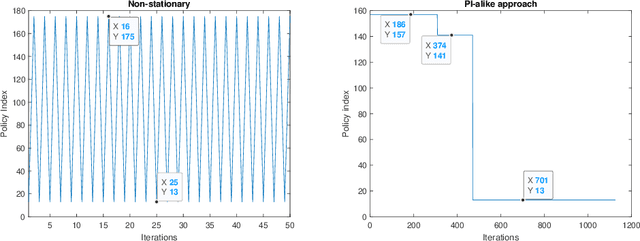
This paper aims to develop a new human-machine interface to improve rehabilitation performance from the perspective of both the user (patient) and the machine (robot) by introducing the co-adaption techniques via model-based reinforcement learning. Previous studies focus more on robot assistance, i.e., to improve the control strategy so as to fulfill the objective of Assist-As-Needed. In this study, we treat the full process of robot-assisted rehabilitation as a co-adaptive or mutual learning process and emphasize the adaptation of the user to the machine. To this end, we proposed a Co-adaptive MDPs (CaMDPs) model to quantify the learning rates based on cooperative multi-agent reinforcement learning (MARL) in the high abstraction layer of the systems. We proposed several approaches to cooperatively adjust the Policy Improvement among the two agents in the framework of Policy Iteration. Based on the proposed co-adaptive MDPs, the simulation study indicates the non-stationary problem can be mitigated using various proposed Policy Improvement approaches.