 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFrontierOR: Benchmarking LLMs' Capacity for Efficient Algorithm Design in Large-Scale Optimization
May 26, 2026Large language models (LLMs) are increasingly used for optimization modeling and solver-code generation, yet practical operations research and optimization problems often require a harder capability: designing scalable algorithms that exploit problem structure and outperform direct formulation-and-solve baselines. Existing benchmarks are limited to small or simplified examples far below real-world scale and complexity. We introduce FrontierOR, among the first benchmarks to systematically evaluate LLM-based efficient algorithm design for realistic large-scale optimization problems. FrontierOR includes 180 tasks derived from methodologically diverse papers published in top-tier operations research venues, each with standardized instances and a hidden, expert-verified evaluation suite. We evaluate seven LLMs spanning frontier, cost-effective, and open-source models both in one-shot and test-time evolution settings. The results reveal that frontier models still struggle to move from executable formulations to efficient optimization algorithms: the strongest one-shot model outperforms Gurobi in only 31% of cases in both solution quality and computational efficiency, and even strong coding agents with test-time evolution achieve only 50% on selected hard tasks. FrontierOR establishes a practical evaluation platform for LLM-based optimization algorithm design, which enables future LLMs and agents to be systematically tested on whether they can move beyond correct formulation toward a feasible, high-quality, and efficient algorithm.
ABS-Mamba: SAM2-Driven Bidirectional Spiral Mamba Network for Medical Image Translation
May 12, 2025Accurate multi-modal medical image translation requires ha-rmonizing global anatomical semantics and local structural fidelity, a challenge complicated by intermodality information loss and structural distortion. We propose ABS-Mamba, a novel architecture integrating the Segment Anything Model 2 (SAM2) for organ-aware semantic representation, specialized convolutional neural networks (CNNs) for preserving modality-specific edge and texture details, and Mamba's selective state-space modeling for efficient long- and short-range feature dependencies. Structurally, our dual-resolution framework leverages SAM2's image encoder to capture organ-scale semantics from high-resolution inputs, while a parallel CNNs branch extracts fine-grained local features. The Robust Feature Fusion Network (RFFN) integrates these epresentations, and the Bidirectional Mamba Residual Network (BMRN) models spatial dependencies using spiral scanning and bidirectional state-space dynamics. A three-stage skip fusion decoder enhances edge and texture fidelity. We employ Efficient Low-Rank Adaptation (LoRA+) fine-tuning to enable precise domain specialization while maintaining the foundational capabilities of the pre-trained components. Extensive experimental validation on the SynthRAD2023 and BraTS2019 datasets demonstrates that ABS-Mamba outperforms state-of-the-art methods, delivering high-fidelity cross-modal synthesis that preserves anatomical semantics and structural details to enhance diagnostic accuracy in clinical applications. The code is available at https://github.com/gatina-yone/ABS-Mamba
Mitigating Spatial Disparity in Urban Prediction Using Residual-Aware Spatiotemporal Graph Neural Networks: A Chicago Case Study
Jan 20, 2025Urban prediction tasks, such as forecasting traffic flow, temperature, and crime rates, are crucial for efficient urban planning and management. However, existing Spatiotemporal Graph Neural Networks (ST-GNNs) often rely solely on accuracy, overlooking spatial and demographic disparities in their predictions. This oversight can lead to imbalanced resource allocation and exacerbate existing inequities in urban areas. This study introduces a Residual-Aware Attention (RAA) Block and an equality-enhancing loss function to address these disparities. By adapting the adjacency matrix during training and incorporating spatial disparity metrics, our approach aims to reduce local segregation of residuals and errors. We applied our methodology to urban prediction tasks in Chicago, utilizing a travel demand dataset as an example. Our model achieved a 48% significant improvement in fairness metrics with only a 9% increase in error metrics. Spatial analysis of residual distributions revealed that models with RAA Blocks produced more equitable prediction results, particularly by reducing errors clustered in central regions. Attention maps demonstrated the model's ability to dynamically adjust focus, leading to more balanced predictions. Case studies of various community areas in Chicago further illustrated the effectiveness of our approach in addressing spatial and demographic disparities, supporting more balanced and equitable urban planning and policy-making.
Self-adaptive vision-language model for 3D segmentation of pulmonary artery and vein
Jan 07, 2025Accurate segmentation of pulmonary structures iscrucial in clinical diagnosis, disease study, and treatment planning. Significant progress has been made in deep learning-based segmentation techniques, but most require much labeled data for training. Consequently, developing precise segmentation methods that demand fewer labeled datasets is paramount in medical image analysis. The emergence of pre-trained vision-language foundation models, such as CLIP, recently opened the door for universal computer vision tasks. Exploiting the generalization ability of these pre-trained foundation models on downstream tasks, such as segmentation, leads to unexpected performance with a relatively small amount of labeled data. However, exploring these models for pulmonary artery-vein segmentation is still limited. This paper proposes a novel framework called Language-guided self-adaptive Cross-Attention Fusion Framework. Our method adopts pre-trained CLIP as a strong feature extractor for generating the segmentation of 3D CT scans, while adaptively aggregating the cross-modality of text and image representations. We propose a s pecially designed adapter module to fine-tune pre-trained CLIP with a self-adaptive learning strategy to effectively fuse the two modalities of embeddings. We extensively validate our method on a local dataset, which is the largest pulmonary artery-vein CT dataset to date and consists of 718 labeled data in total. The experiments show that our method outperformed other state-of-the-art methods by a large margin. Our data and code will be made publicly available upon acceptance.
High-Sensitivity Vision-Based Tactile Sensing Enhanced by Microstructures and Lightweight CNN
Dec 30, 2024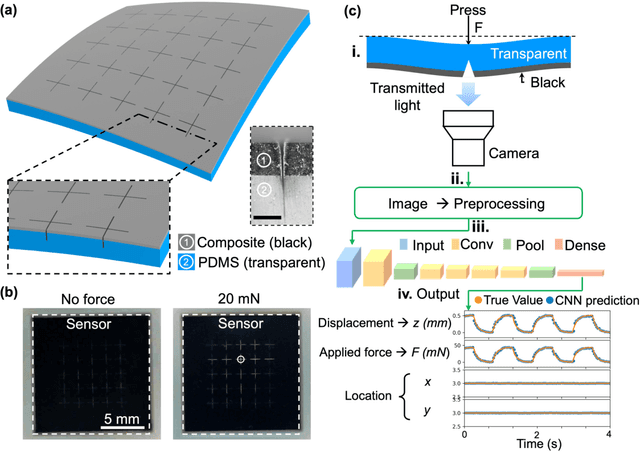
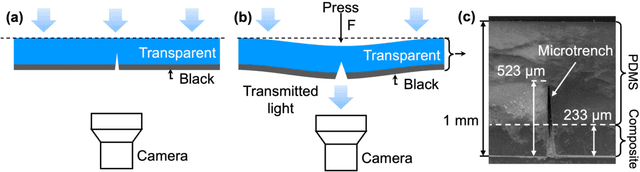
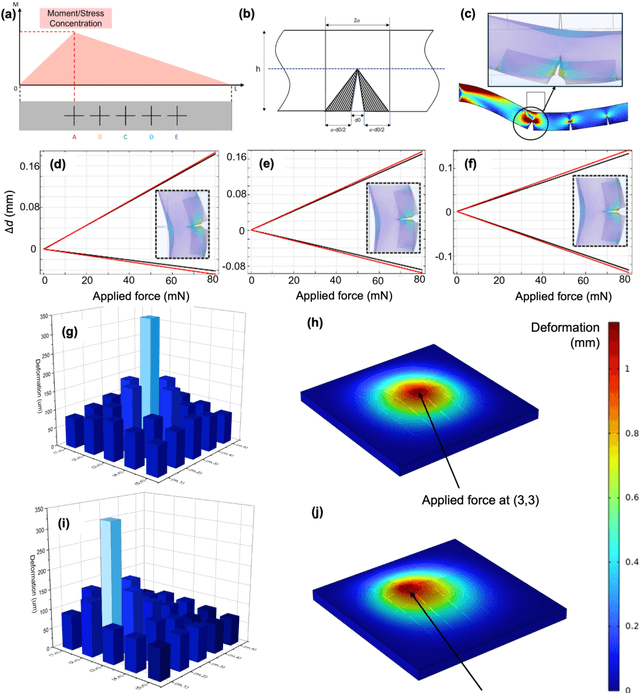
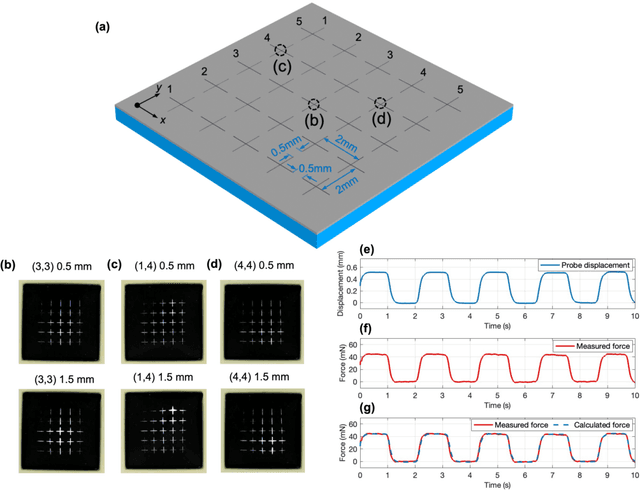
Tactile sensing is critical in advanced interactive systems by emulating the human sense of touch to detect stimuli. Vision-based tactile sensors (VBTSs) are promising for their ability to provide rich information, robustness, adaptability, low cost, and multimodal capabilities. However, current technologies still have limitations in sensitivity, spatial resolution, and the high computational demands of deep learning-based image processing. This paper presents a comprehensive approach combining a novel sensor structure with micromachined structures and an efficient image processing method, and demonstrates that carefully engineered microstructures within the sensor hardware can significantly enhance sensitivity while reducing computational load. Unlike traditional designs with tracking markers, our sensor incorporates an interface surface with micromachined trenches, as an example of microstructures, which modulate light transmission and amplify the variation in response to applied force. By capturing variations in brightness, wire width, and cross pattern locations with a camera, the sensor accurately infers the contact location, the magnitude of displacement and applied force with a lightweight convolutional neural network (CNN). Theoretical and experimental results demonstrated that the microstructures significantly enhance sensitivity by amplifying the visual effects of shape distortion. The sensor system effectively detected forces below 10 mN, and achieved a millimetre-level single-point spatial resolution. Using a model with only one convolutional layer, a mean absolute error (MAE) below 0.05 mm have been achieved. Its soft sensor body ensures compatibility with soft robots and wearable electronics, while its immunity to electrical crosstalk and interference guarantees reliability in complex human-machine environments.
Advancing Transportation Mode Share Analysis with Built Environment: Deep Hybrid Models with Urban Road Network
May 23, 2024



Transportation mode share analysis is important to various real-world transportation tasks as it helps researchers understand the travel behaviors and choices of passengers. A typical example is the prediction of communities' travel mode share by accounting for their sociodemographics like age, income, etc., and travel modes' attributes (e.g. travel cost and time). However, there exist only limited efforts in integrating the structure of the urban built environment, e.g., road networks, into the mode share models to capture the impacts of the built environment. This task usually requires manual feature engineering or prior knowledge of the urban design features. In this study, we propose deep hybrid models (DHM), which directly combine road networks and sociodemographic features as inputs for travel mode share analysis. Using graph embedding (GE) techniques, we enhance travel demand models with a more powerful representation of urban structures. In experiments of mode share prediction in Chicago, results demonstrate that DHM can provide valuable spatial insights into the sociodemographic structure, improving the performance of travel demand models in estimating different mode shares at the city level. Specifically, DHM improves the results by more than 20\% while retaining the interpretation power of the choice models, demonstrating its superiority in interpretability, prediction accuracy, and geographical insights.
$\mathrm{F^2Depth}$: Self-supervised Indoor Monocular Depth Estimation via Optical Flow Consistency and Feature Map Synthesis
Mar 27, 2024Self-supervised monocular depth estimation methods have been increasingly given much attention due to the benefit of not requiring large, labelled datasets. Such self-supervised methods require high-quality salient features and consequently suffer from severe performance drop for indoor scenes, where low-textured regions dominant in the scenes are almost indiscriminative. To address the issue, we propose a self-supervised indoor monocular depth estimation framework called $\mathrm{F^2Depth}$. A self-supervised optical flow estimation network is introduced to supervise depth learning. To improve optical flow estimation performance in low-textured areas, only some patches of points with more discriminative features are adopted for finetuning based on our well-designed patch-based photometric loss. The finetuned optical flow estimation network generates high-accuracy optical flow as a supervisory signal for depth estimation. Correspondingly, an optical flow consistency loss is designed. Multi-scale feature maps produced by finetuned optical flow estimation network perform warping to compute feature map synthesis loss as another supervisory signal for depth learning. Experimental results on the NYU Depth V2 dataset demonstrate the effectiveness of the framework and our proposed losses. To evaluate the generalization ability of our $\mathrm{F^2Depth}$, we collect a Campus Indoor depth dataset composed of approximately 1500 points selected from 99 images in 18 scenes. Zero-shot generalization experiments on 7-Scenes dataset and Campus Indoor achieve $\delta_1$ accuracy of 75.8% and 76.0% respectively. The accuracy results show that our model can generalize well to monocular images captured in unknown indoor scenes.
Precise Hybrid-Actuation Robotic Fiber for Enhanced Cervical Disease Treatment
Feb 16, 2024



Treatment for high-grade precancerous cervical lesions and early-stage cancers, mainly affecting women of reproductive age, often involves fertility-sparing treatment methods. Commonly used local treatments for cervical precancers have shown the risk of leaving a positive cancer margin and engendering subsequent complications according to the precision and depth of excision. An intra-operative device that allows the careful excision of the disease while conserving healthy cervical tissue would potentially enhance such treatment. In this study, we developed a polymer-based robotic fiber measuring 150 mm in length and 1.7 mm in diameter, fabricated using a highly scalable fiber drawing technique. This robotic fiber utilizes a hybrid actuation mechanism, combining electrothermal and tendon-driven actuation mechanisms, thus enabling a maximum motion range of 46 mm from its origin with a sub-100 {\mu}m motion precision. We also developed control algorithms for the actuation methods of this robotic fiber, including predefined path control and telemanipulation, enabling coarse positioning of the fiber tip to the target area followed by a precise scan. The combination of a surgical laser fiber with the robotic fiber allows for high-precision surgical ablation. Additionally, we conducted experiments using a cervical phantom that demonstrated the robotic fiber's ability to access and perform high-precision scans, highlighting its potential for cervical disease treatments and improvement of oncological outcomes.
Synergizing Spatial Optimization with Large Language Models for Open-Domain Urban Itinerary Planning
Feb 11, 2024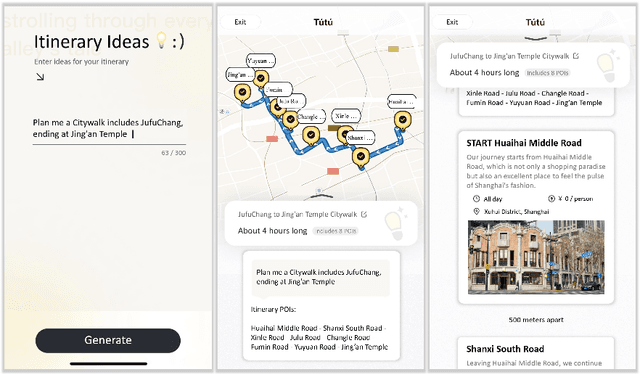
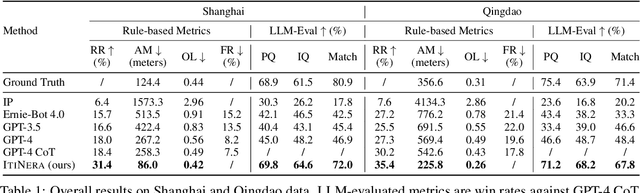
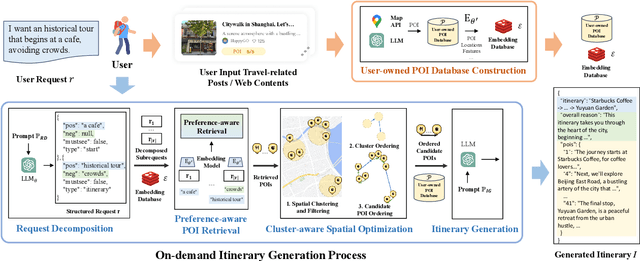
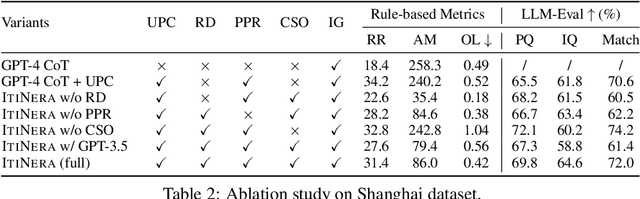
In this paper, we for the first time propose the task of Open-domain Urban Itinerary Planning (OUIP) for citywalk, which directly generates itineraries based on users' requests described in natural language. OUIP is different from conventional itinerary planning, which limits users from expressing more detailed needs and hinders true personalization. Recently, large language models (LLMs) have shown potential in handling diverse tasks. However, due to non-real-time information, incomplete knowledge, and insufficient spatial awareness, they are unable to independently deliver a satisfactory user experience in OUIP. Given this, we present ItiNera, an OUIP system that synergizes spatial optimization with Large Language Models (LLMs) to provide services that customize urban itineraries based on users' needs. Specifically, we develop an LLM-based pipeline for extracting and updating POI features to create a user-owned personalized POI database. For each user request, we leverage LLM in cooperation with an embedding-based module for retrieving candidate POIs from the user's POI database. Then, a spatial optimization module is used to order these POIs, followed by LLM crafting a personalized, spatially coherent itinerary. To the best of our knowledge, this study marks the first integration of LLMs to innovate itinerary planning solutions. Extensive experiments on offline datasets and online subjective evaluation have demonstrated the capacities of our system to deliver more responsive and spatially coherent itineraries than current LLM-based solutions. Our system has been deployed in production at the TuTu online travel service and has attracted thousands of users for their urban travel planning.
Fairness-Enhancing Vehicle Rebalancing in the Ride-hailing System
Dec 29, 2023
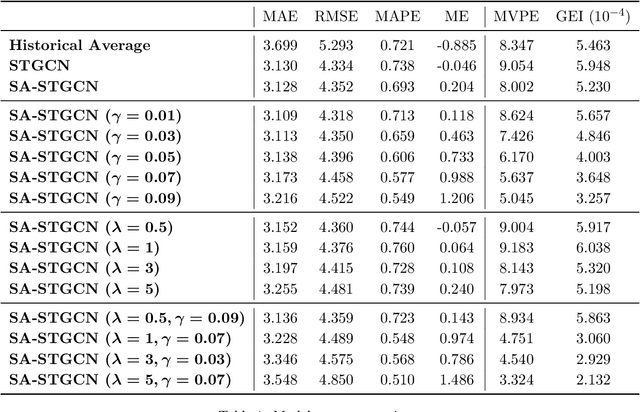
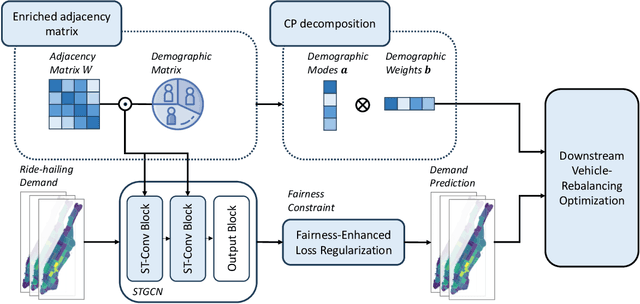
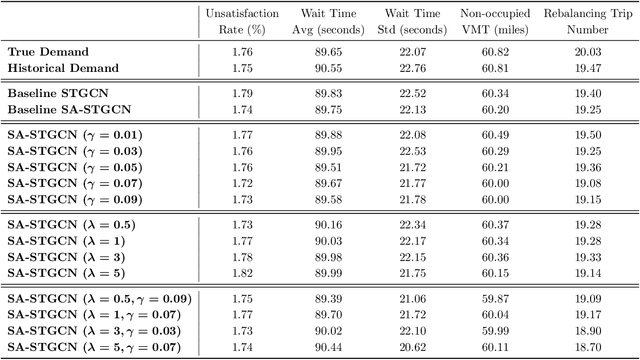
The rapid growth of the ride-hailing industry has revolutionized urban transportation worldwide. Despite its benefits, equity concerns arise as underserved communities face limited accessibility to affordable ride-hailing services. A key issue in this context is the vehicle rebalancing problem, where idle vehicles are moved to areas with anticipated demand. Without equitable approaches in demand forecasting and rebalancing strategies, these practices can further deepen existing inequities. In the realm of ride-hailing, three main facets of fairness are recognized: algorithmic fairness, fairness to drivers, and fairness to riders. This paper focuses on enhancing both algorithmic and rider fairness through a novel vehicle rebalancing method. We introduce an approach that combines a Socio-Aware Spatial-Temporal Graph Convolutional Network (SA-STGCN) for refined demand prediction and a fairness-integrated Matching-Integrated Vehicle Rebalancing (MIVR) model for subsequent vehicle rebalancing. Our methodology is designed to reduce prediction discrepancies and ensure equitable service provision across diverse regions. The effectiveness of our system is evaluated using simulations based on real-world ride-hailing data. The results suggest that our proposed method enhances both accuracy and fairness in forecasting ride-hailing demand, ultimately resulting in more equitable vehicle rebalancing in subsequent operations. Specifically, the algorithm developed in this study effectively reduces the standard deviation and average customer wait times by 6.48% and 0.49%, respectively. This achievement signifies a beneficial outcome for ride-hailing platforms, striking a balance between operational efficiency and fairness.