 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOnline Linear Programming with Replenishment
Jan 21, 2026We study an online linear programming (OLP) model in which inventory is not provided upfront but instead arrives gradually through an exogenous stochastic replenishment process. This replenishment-based formulation captures operational settings, such as e-commerce fulfillment, perishable supply chains, and renewable-powered systems, where resources are accumulated gradually and initial inventories are small or zero. The introduction of dispersed, uncertain replenishment fundamentally alters the structure of classical OLPs, creating persistent stockout risk and eliminating advance knowledge of the total budget. We develop new algorithms and regret analyses for three major distributional regimes studied in the OLP literature: bounded distributions, finite-support distributions, and continuous-support distributions with a non-degeneracy condition. For bounded distributions, we design an algorithm that achieves $\widetilde{\mathcal{O}}(\sqrt{T})$ regret. For finite-support distributions with a non-degenerate induced LP, we obtain $\mathcal{O}(\log T)$ regret, and we establish an $Ω(\sqrt{T})$ lower bound for degenerate instances, demonstrating a sharp separation from the classical setting where $\mathcal{O}(1)$ regret is achievable. For continuous-support, non-degenerate distributions, we develop a two-stage accumulate-then-convert algorithm that achieves $\mathcal{O}(\log^2 T)$ regret, comparable to the $\mathcal{O}(\log T)$ regret in classical OLPs. Together, these results provide a near-complete characterization of the optimal regret achievable in OLP with replenishment. Finally, we empirically evaluate our algorithms and demonstrate their advantages over natural adaptations of classical OLP methods in the replenishment setting.
TimeMixer++: A General Time Series Pattern Machine for Universal Predictive Analysis
Oct 21, 2024



Time series analysis plays a critical role in numerous applications, supporting tasks such as forecasting, classification, anomaly detection, and imputation. In this work, we present the time series pattern machine (TSPM), a model designed to excel in a broad range of time series tasks through powerful representation and pattern extraction capabilities. Traditional time series models often struggle to capture universal patterns, limiting their effectiveness across diverse tasks. To address this, we define multiple scales in the time domain and various resolutions in the frequency domain, employing various mixing strategies to extract intricate, task-adaptive time series patterns. Specifically, we introduce a general-purpose TSPM that processes multi-scale time series using (1) multi-resolution time imaging (MRTI), (2) time image decomposition (TID), (3) multi-scale mixing (MCM), and (4) multi-resolution mixing (MRM) to extract comprehensive temporal patterns. MRTI transforms multi-scale time series into multi-resolution time images, capturing patterns across both temporal and frequency domains. TID leverages dual-axis attention to extract seasonal and trend patterns, while MCM hierarchically aggregates these patterns across scales. MRM adaptively integrates all representations across resolutions. This method achieves state-of-the-art performance across 8 time series analytical tasks, consistently surpassing both general-purpose and task-specific models. Our work marks a promising step toward the next generation of TSPMs, paving the way for further advancements in time series analysis.
Large Language Models for Travel Behavior Prediction
Nov 30, 2023



Travel behavior prediction is a fundamental task in transportation demand management. The conventional methods for travel behavior prediction rely on numerical data to construct mathematical models and calibrate model parameters to represent human preferences. Recent advancement in large language models (LLMs) has shown great reasoning abilities to solve complex problems. In this study, we propose to use LLMs to predict travel behavior with prompt engineering without data-based parameter learning. Specifically, we carefully design our prompts that include 1) task description, 2) travel characteristics, 3) individual attributes, and 4) guides of thinking with domain knowledge, and ask the LLMs to predict an individual's travel behavior and explain the results. We select the travel mode choice task as a case study. Results show that, though no training samples are provided, LLM-based predictions have competitive accuracy and F1-score as canonical supervised learning methods such as multinomial logit, random forest, and neural networks. LLMs can also output reasons that support their prediction. However, though in most of the cases, the output explanations are reasonable, we still observe cases that violate logic or with hallucinations.
Predicting Drivers' Route Trajectories in Last-Mile Delivery Using A Pair-wise Attention-based Pointer Neural Network
Jan 10, 2023



In last-mile delivery, drivers frequently deviate from planned delivery routes because of their tacit knowledge of the road and curbside infrastructure, customer availability, and other characteristics of the respective service areas. Hence, the actual stop sequences chosen by an experienced human driver may be potentially preferable to the theoretical shortest-distance routing under real-life operational conditions. Thus, being able to predict the actual stop sequence that a human driver would follow can help to improve route planning in last-mile delivery. This paper proposes a pair-wise attention-based pointer neural network for this prediction task using drivers' historical delivery trajectory data. In addition to the commonly used encoder-decoder architecture for sequence-to-sequence prediction, we propose a new attention mechanism based on an alternative specific neural network to capture the local pair-wise information for each pair of stops. To further capture the global efficiency of the route, we propose a new iterative sequence generation algorithm that is used after model training to identify the first stop of a route that yields the lowest operational cost. Results from an extensive case study on real operational data from Amazon's last-mile delivery operations in the US show that our proposed method can significantly outperform traditional optimization-based approaches and other machine learning methods (such as the Long Short-Term Memory encoder-decoder and the original pointer network) in finding stop sequences that are closer to high-quality routes executed by experienced drivers in the field. Compared to benchmark models, the proposed model can increase the average prediction accuracy of the first four stops from around 0.2 to 0.312, and reduce the disparity between the predicted route and the actual route by around 15%.
Comparing hundreds of machine learning classifiers and discrete choice models in predicting travel behavior: an empirical benchmark
Feb 01, 2021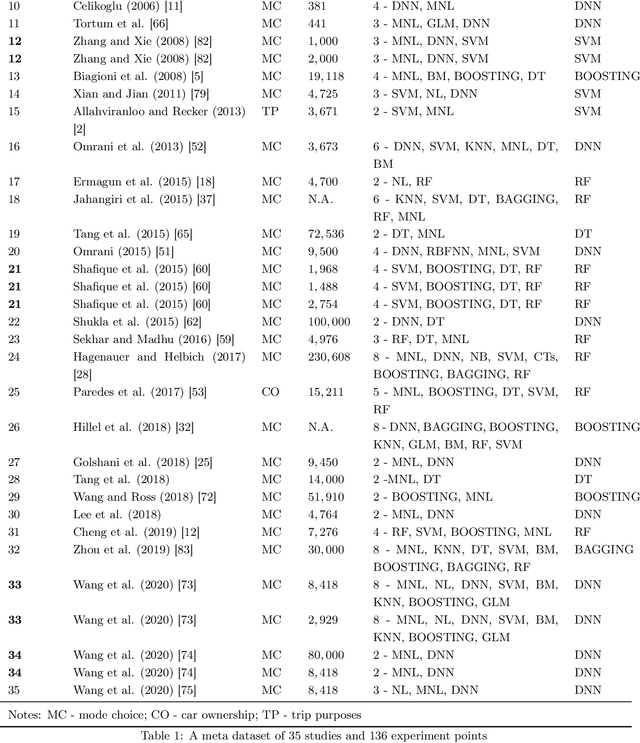
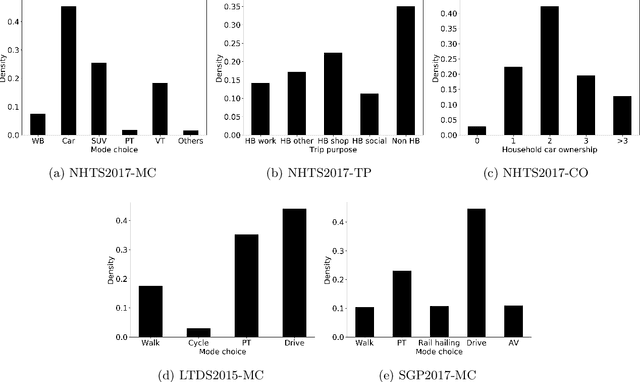
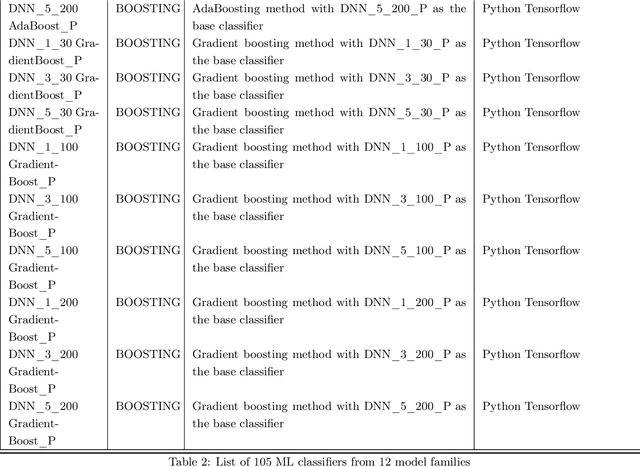
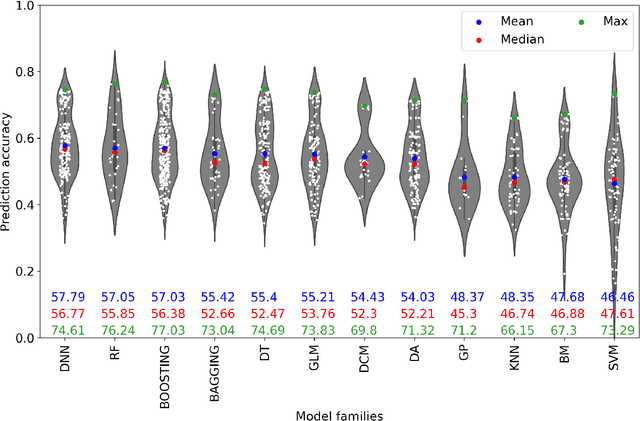
Researchers have compared machine learning (ML) classifiers and discrete choice models (DCMs) in predicting travel behavior, but the generalizability of the findings is limited by the specifics of data, contexts, and authors' expertise. This study seeks to provide a generalizable empirical benchmark by comparing hundreds of ML and DCM classifiers in a highly structured manner. The experiments evaluate both prediction accuracy and computational cost by spanning four hyper-dimensions, including 105 ML and DCM classifiers from 12 model families, 3 datasets, 3 sample sizes, and 3 outputs. This experimental design leads to an immense number of 6,970 experiments, which are corroborated with a meta dataset of 136 experiment points from 35 previous studies. This study is hitherto the most comprehensive and almost exhaustive comparison of the classifiers for travel behavioral prediction. We found that the ensemble methods and deep neural networks achieve the highest predictive performance, but at a relatively high computational cost. Random forests are the most computationally efficient, balancing between prediction and computation. While discrete choice models offer accuracy with only 3-4 percentage points lower than the top ML classifiers, they have much longer computational time and become computationally impossible with large sample size, high input dimensions, or simulation-based estimation. The relative ranking of the ML and DCM classifiers is highly stable, while the absolute values of the prediction accuracy and computational time have large variations. Overall, this paper suggests using deep neural networks, model ensembles, and random forests as baseline models for future travel behavior prediction. For choice modeling, the DCM community should switch more attention from fitting models to improving computational efficiency, so that the DCMs can be widely adopted in the big data context.
Individual Mobility Prediction: An Interpretable Activity-based Hidden Markov Approach
Jan 11, 2021
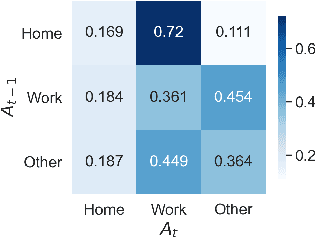
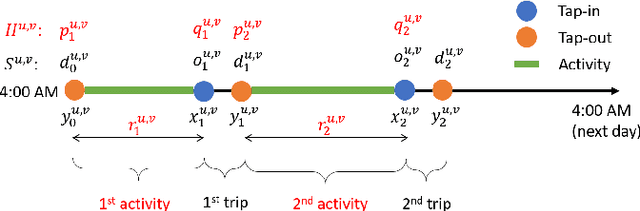
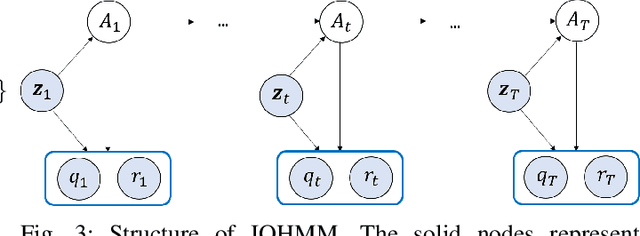
Individual mobility is driven by demand for activities with diverse spatiotemporal patterns, but existing methods for mobility prediction often overlook the underlying activity patterns. To address this issue, this study develops an activity-based modeling framework for individual mobility prediction. Specifically, an input-output hidden Markov model (IOHMM) framework is proposed to simultaneously predict the (continuous) time and (discrete) location of an individual's next trip using transit smart card data. The prediction task can be transformed into predicting the hidden activity duration and end location. Based on a case study of Hong Kong's metro system, we show that the proposed model can achieve similar prediction performance as the state-of-the-art long short-term memory (LSTM) model. Unlike LSTM, the proposed IOHMM model can also be used to analyze hidden activity patterns, which provides meaningful behavioral interpretation for why an individual makes a certain trip. Therefore, the activity-based prediction framework offers a way to preserve the predictive power of advanced machine learning methods while enhancing our ability to generate insightful behavioral explanations, which is useful for enhancing situational awareness in user-centric transportation applications such as personalized traveler information.
Theory-based residual neural networks: A synergy of discrete choice models and deep neural networks
Oct 22, 2020
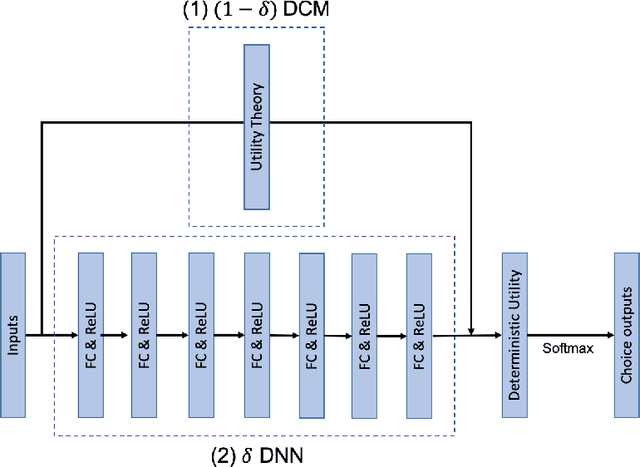
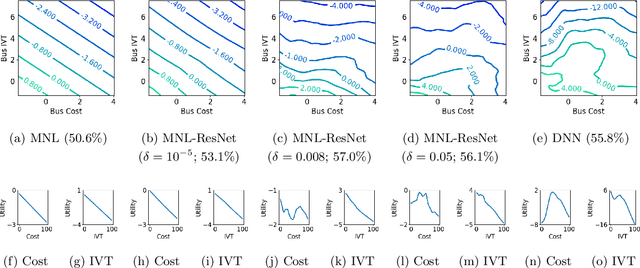
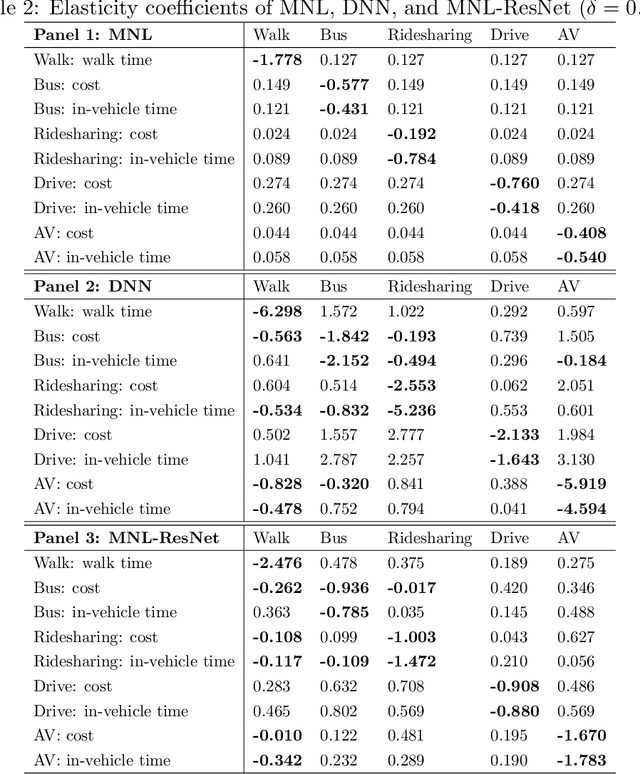
Researchers often treat data-driven and theory-driven models as two disparate or even conflicting methods in travel behavior analysis. However, the two methods are highly complementary because data-driven methods are more predictive but less interpretable and robust, while theory-driven methods are more interpretable and robust but less predictive. Using their complementary nature, this study designs a theory-based residual neural network (TB-ResNet) framework, which synergizes discrete choice models (DCMs) and deep neural networks (DNNs) based on their shared utility interpretation. The TB-ResNet framework is simple, as it uses a ($\delta$, 1-$\delta$) weighting to take advantage of DCMs' simplicity and DNNs' richness, and to prevent underfitting from the DCMs and overfitting from the DNNs. This framework is also flexible: three instances of TB-ResNets are designed based on multinomial logit model (MNL-ResNets), prospect theory (PT-ResNets), and hyperbolic discounting (HD-ResNets), which are tested on three data sets. Compared to pure DCMs, the TB-ResNets provide greater prediction accuracy and reveal a richer set of behavioral mechanisms owing to the utility function augmented by the DNN component in the TB-ResNets. Compared to pure DNNs, the TB-ResNets can modestly improve prediction and significantly improve interpretation and robustness, because the DCM component in the TB-ResNets stabilizes the utility functions and input gradients. Overall, this study demonstrates that it is both feasible and desirable to synergize DCMs and DNNs by combining their utility specifications under a TB-ResNet framework. Although some limitations remain, this TB-ResNet framework is an important first step to create mutual benefits between DCMs and DNNs for travel behavior modeling, with joint improvement in prediction, interpretation, and robustness.