 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEstimating City-wide operating mode Distribution of Light-Duty Vehicles: A Neural Network-based Approach
Mar 28, 2025



Driving cycles are a set of driving conditions and are crucial for the existing emission estimation model to evaluate vehicle performance, fuel efficiency, and emissions, by matching them with average speed to calculate the operating modes, such as braking, idling, and cruising. While existing emission estimation models, such as the Motor Vehicle Emission Simulator (MOVES), are powerful tools, their reliance on predefined driving cycles can be limiting, as these cycles often do not accurately represent regional driving conditions, making the models less effective for city-wide analyses. To solve this problem, this paper proposes a modular neural network (NN)-based framework to estimate operating mode distributions bypassing the driving cycle development phase, utilizing macroscopic variables such as speed, flow, and link infrastructure attributes. The proposed method is validated using a well-calibrated microsimulation model of Brookline MA, the United States. The results indicate that the proposed framework outperforms the operating mode distribution calculated by MOVES based on default driving cycles, providing a closer match to the actual operating mode distribution derived from trajectory data. Specifically, the proposed model achieves an average RMSE of 0.04 in predicting operating mode distribution, compared to 0.08 for MOVES. The average error in emission estimation across pollutants is 8.57% for the proposed method, lower than the 32.86% error for MOVES. In particular, for the estimation of CO2, the proposed method has an error of just 4%, compared to 35% for MOVES. The proposed model can be utilized for real-time emissions monitoring by providing rapid and accurate emissions estimates with easily accessible inputs.
Graph Neural Networks for Road Safety Modeling: Datasets and Evaluations for Accident Analysis
Oct 31, 2023We consider the problem of traffic accident analysis on a road network based on road network connections and traffic volume. Previous works have designed various deep-learning methods using historical records to predict traffic accident occurrences. However, there is a lack of consensus on how accurate existing methods are, and a fundamental issue is the lack of public accident datasets for comprehensive evaluations. This paper constructs a large-scale, unified dataset of traffic accident records from official reports of various states in the US, totaling 9 million records, accompanied by road networks and traffic volume reports. Using this new dataset, we evaluate existing deep-learning methods for predicting the occurrence of accidents on road networks. Our main finding is that graph neural networks such as GraphSAGE can accurately predict the number of accidents on roads with less than 22% mean absolute error (relative to the actual count) and whether an accident will occur or not with over 87% AUROC, averaged over states. We achieve these results by using multitask learning to account for cross-state variabilities (e.g., availability of accident labels) and transfer learning to combine traffic volume with accident prediction. Ablation studies highlight the importance of road graph-structural features, amongst other features. Lastly, we discuss the implications of the analysis and develop a package for easily using our new dataset.
Uncertainty Quantification of Sparse Travel Demand Prediction with Spatial-Temporal Graph Neural Networks
Aug 11, 2022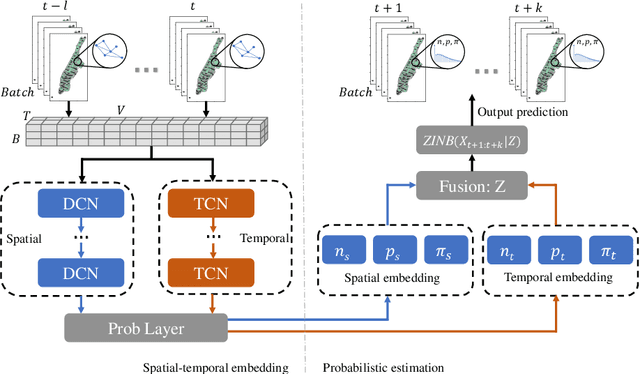
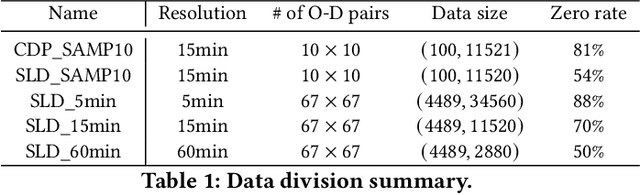
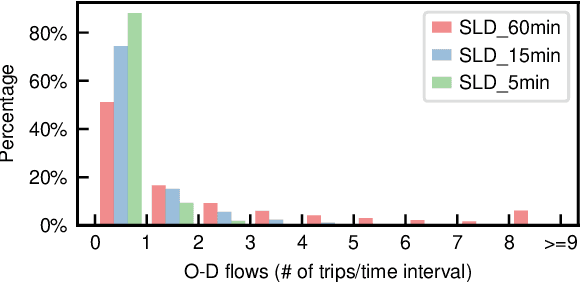
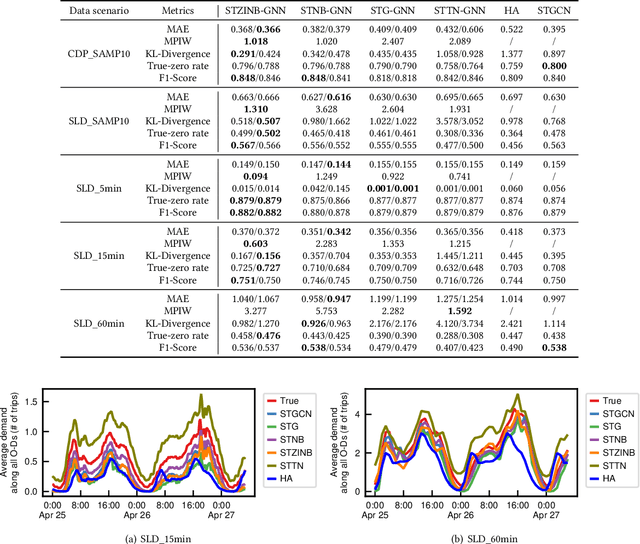
Origin-Destination (O-D) travel demand prediction is a fundamental challenge in transportation. Recently, spatial-temporal deep learning models demonstrate the tremendous potential to enhance prediction accuracy. However, few studies tackled the uncertainty and sparsity issues in fine-grained O-D matrices. This presents a serious problem, because a vast number of zeros deviate from the Gaussian assumption underlying the deterministic deep learning models. To address this issue, we design a Spatial-Temporal Zero-Inflated Negative Binomial Graph Neural Network (STZINB-GNN) to quantify the uncertainty of the sparse travel demand. It analyzes spatial and temporal correlations using diffusion and temporal convolution networks, which are then fused to parameterize the probabilistic distributions of travel demand. The STZINB-GNN is examined using two real-world datasets with various spatial and temporal resolutions. The results demonstrate the superiority of STZINB-GNN over benchmark models, especially under high spatial-temporal resolutions, because of its high accuracy, tight confidence intervals, and interpretable parameters. The sparsity parameter of the STZINB-GNN has physical interpretation for various transportation applications.
Individual Mobility Prediction: An Interpretable Activity-based Hidden Markov Approach
Jan 11, 2021
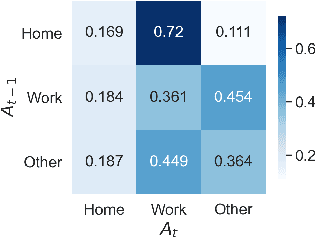
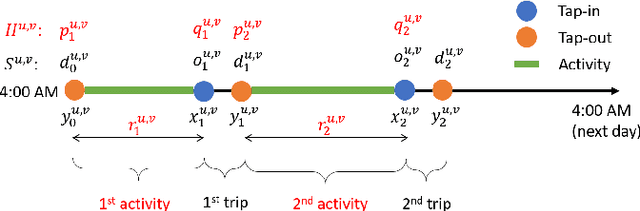
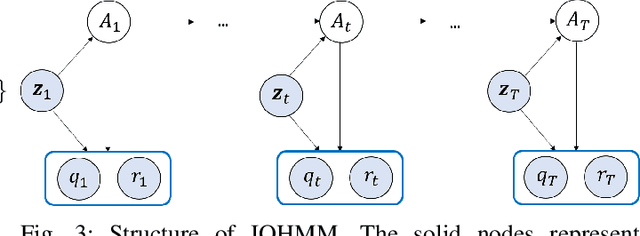
Individual mobility is driven by demand for activities with diverse spatiotemporal patterns, but existing methods for mobility prediction often overlook the underlying activity patterns. To address this issue, this study develops an activity-based modeling framework for individual mobility prediction. Specifically, an input-output hidden Markov model (IOHMM) framework is proposed to simultaneously predict the (continuous) time and (discrete) location of an individual's next trip using transit smart card data. The prediction task can be transformed into predicting the hidden activity duration and end location. Based on a case study of Hong Kong's metro system, we show that the proposed model can achieve similar prediction performance as the state-of-the-art long short-term memory (LSTM) model. Unlike LSTM, the proposed IOHMM model can also be used to analyze hidden activity patterns, which provides meaningful behavioral interpretation for why an individual makes a certain trip. Therefore, the activity-based prediction framework offers a way to preserve the predictive power of advanced machine learning methods while enhancing our ability to generate insightful behavioral explanations, which is useful for enhancing situational awareness in user-centric transportation applications such as personalized traveler information.