 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHyperspectral Image Restoration and Super-resolution with Physics-Aware Deep Learning for Biomedical Applications
Mar 03, 2025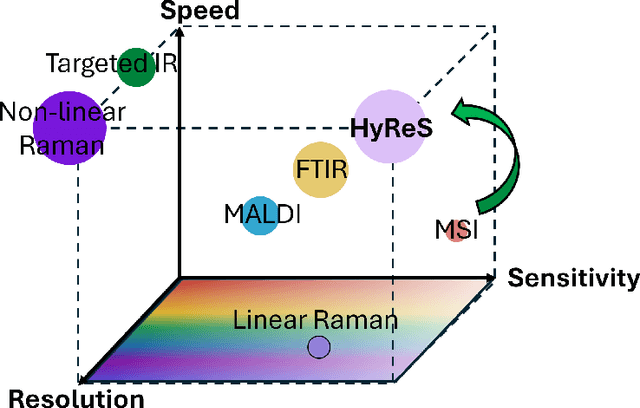
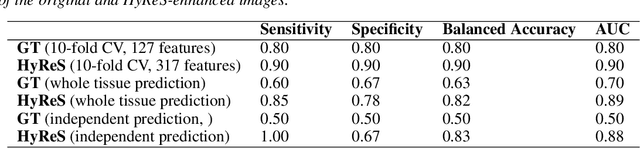
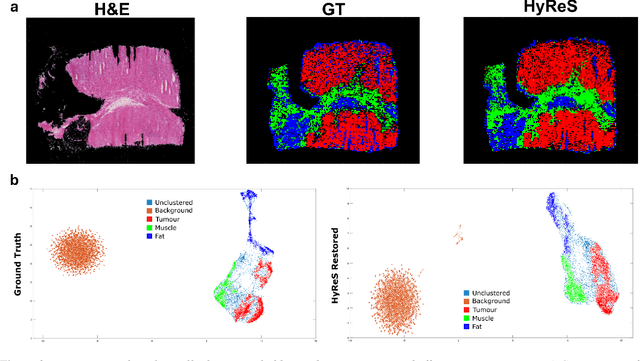
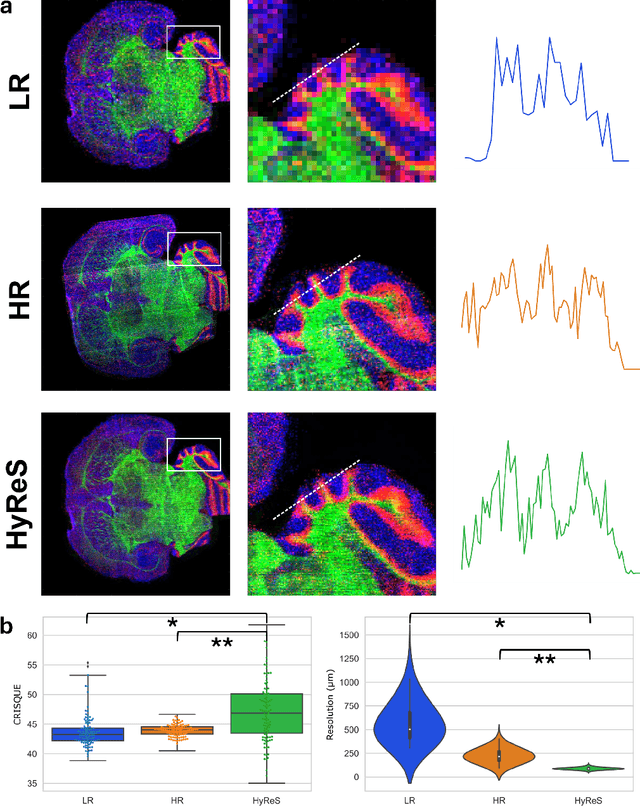
Hyperspectral imaging is a powerful bioimaging tool which can uncover novel insights, thanks to its sensitivity to the intrinsic properties of materials. However, this enhanced contrast comes at the cost of system complexity, constrained by an inherent trade-off between spatial resolution, spectral resolution, and imaging speed. To overcome this limitation, we present a deep learning-based approach that restores and enhances pixel resolution post-acquisition without any a priori knowledge. Fine-tuned using metrics aligned with the imaging model, our physics-aware method achieves a 16X pixel super-resolution enhancement and a 12X imaging speedup without the need of additional training data for transfer learning. Applied to both synthetic and experimental data from five different sample types, we demonstrate that the model preserves biological integrity, ensuring no features are lost or hallucinated. We also concretely demonstrate the model's ability to reveal disease-associated metabolic changes in Downs syndrome that would otherwise remain undetectable. Furthermore, we provide physical insights into the inner workings of the model, paving the way for future refinements that could potentially surpass instrumental limits in an explainable manner. All methods are available as open-source software on GitHub.
Precise Hybrid-Actuation Robotic Fiber for Enhanced Cervical Disease Treatment
Feb 16, 2024



Treatment for high-grade precancerous cervical lesions and early-stage cancers, mainly affecting women of reproductive age, often involves fertility-sparing treatment methods. Commonly used local treatments for cervical precancers have shown the risk of leaving a positive cancer margin and engendering subsequent complications according to the precision and depth of excision. An intra-operative device that allows the careful excision of the disease while conserving healthy cervical tissue would potentially enhance such treatment. In this study, we developed a polymer-based robotic fiber measuring 150 mm in length and 1.7 mm in diameter, fabricated using a highly scalable fiber drawing technique. This robotic fiber utilizes a hybrid actuation mechanism, combining electrothermal and tendon-driven actuation mechanisms, thus enabling a maximum motion range of 46 mm from its origin with a sub-100 {\mu}m motion precision. We also developed control algorithms for the actuation methods of this robotic fiber, including predefined path control and telemanipulation, enabling coarse positioning of the fiber tip to the target area followed by a precise scan. The combination of a surgical laser fiber with the robotic fiber allows for high-precision surgical ablation. Additionally, we conducted experiments using a cervical phantom that demonstrated the robotic fiber's ability to access and perform high-precision scans, highlighting its potential for cervical disease treatments and improvement of oncological outcomes.