 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePrecise Hybrid-Actuation Robotic Fiber for Enhanced Cervical Disease Treatment
Feb 16, 2024



Treatment for high-grade precancerous cervical lesions and early-stage cancers, mainly affecting women of reproductive age, often involves fertility-sparing treatment methods. Commonly used local treatments for cervical precancers have shown the risk of leaving a positive cancer margin and engendering subsequent complications according to the precision and depth of excision. An intra-operative device that allows the careful excision of the disease while conserving healthy cervical tissue would potentially enhance such treatment. In this study, we developed a polymer-based robotic fiber measuring 150 mm in length and 1.7 mm in diameter, fabricated using a highly scalable fiber drawing technique. This robotic fiber utilizes a hybrid actuation mechanism, combining electrothermal and tendon-driven actuation mechanisms, thus enabling a maximum motion range of 46 mm from its origin with a sub-100 {\mu}m motion precision. We also developed control algorithms for the actuation methods of this robotic fiber, including predefined path control and telemanipulation, enabling coarse positioning of the fiber tip to the target area followed by a precise scan. The combination of a surgical laser fiber with the robotic fiber allows for high-precision surgical ablation. Additionally, we conducted experiments using a cervical phantom that demonstrated the robotic fiber's ability to access and perform high-precision scans, highlighting its potential for cervical disease treatments and improvement of oncological outcomes.
Mechatronic Investigation of Wound Healing Process by Using Micro Robot
Aug 05, 2021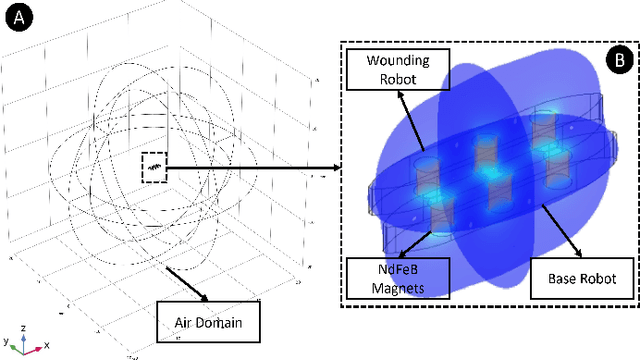

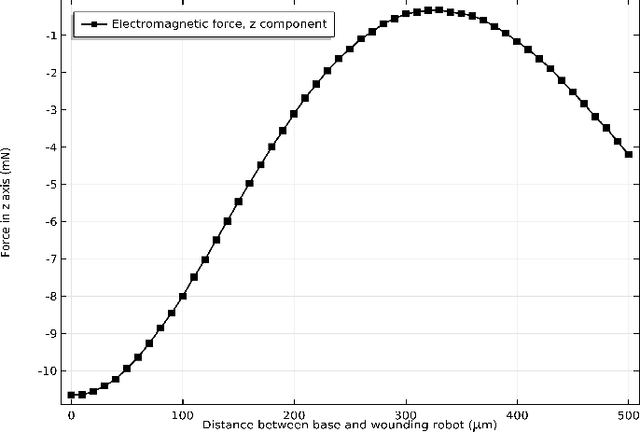
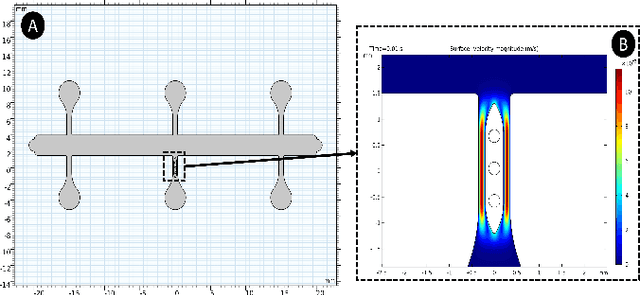
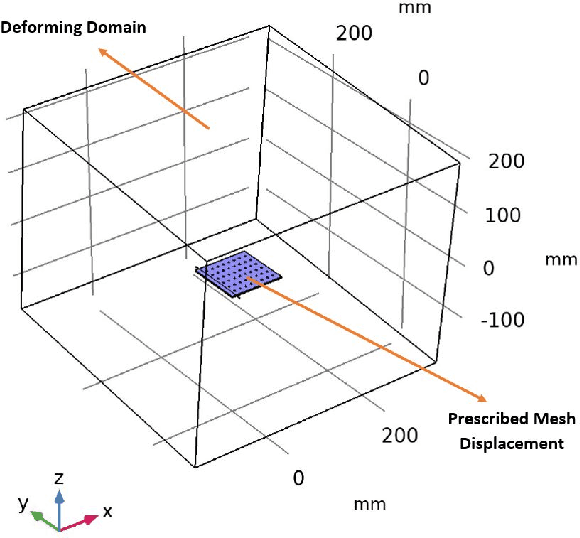
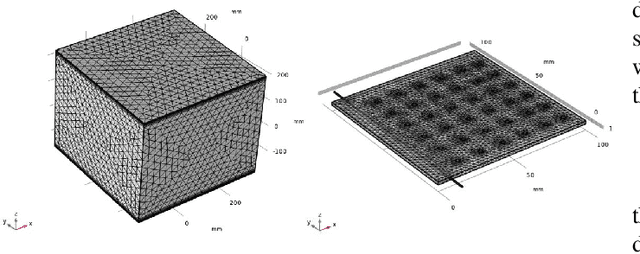
The purpose of this study is to find ideal forces for reducing cell stress in wound healing process by micro robots. Because of this aim, we made two simulations on COMSOL Multiphysics with micro robot to find correct force. As a result of these simulation, we created force curves to obtain the minimum force and friction force that could lift the cells from the surface will be determined. As the potential of the system for two micro robots that have 2 mm x 0.25 mm x 0.4 mm dimension SU-8 body with 3 NdFeB that have 0.25 thickness and diameter, simulation results at maximum force in the x-axis calculated with 4.640 mN, the distance between the two robots is 150 um.
Automated Onychomycosis Detection Using Deep Neural Networks
Jul 13, 2021
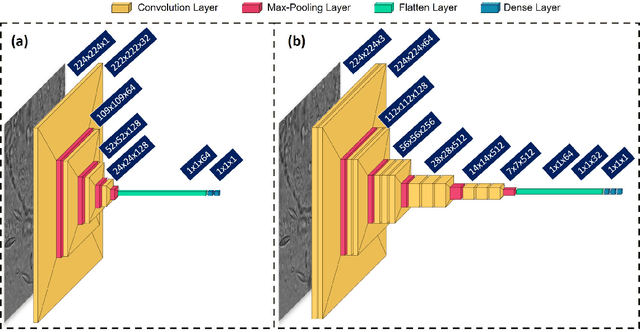
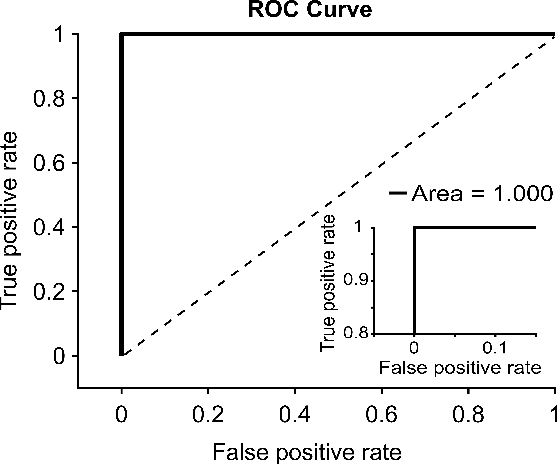

Clinical dermatology, still relies heavily on manual introspection of fungi within a Potassium Hydroxide (KOH) solution using a brightfield microscope. However, this method takes a long time, is based on the experience of the clinician, and has a low accuracy. With the increase of neural network applications in the field of clinical microscopy it is now possible to automate such manual processes increasing both efficiency and accuracy. This study presents a deep neural network structure that enables the rapid solutions for these problems and can perform automatic fungi detection in grayscale images without colorants. Microscopic images of 81 fungi and 235 ceratine were collected. Then, smaller patches were extracted containing 2062 fungi and 2142 ceratine. In order to detect fungus and ceratine, two models were created one of which was a custom neural network and the other was based on the VGG16 architecture. The developed custom model had 99.84% accuracy, and an area under the curve (AUC) value of 1.00, while the VGG16 model had 98.89% accuracy and an AUC value of 0.99. However, average accuracy and AUC value of clinicians is 72.8% and 0.87 respectively. This deep learning model allows the development of an automated system that can detect fungi within microscopic images.
The Effect of Pore Structure in Flapping Wings on Flight Performance
Jun 03, 2021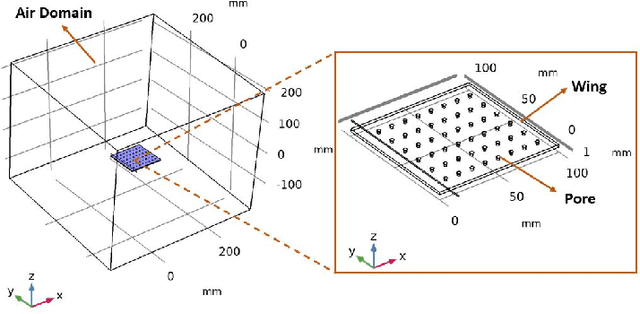
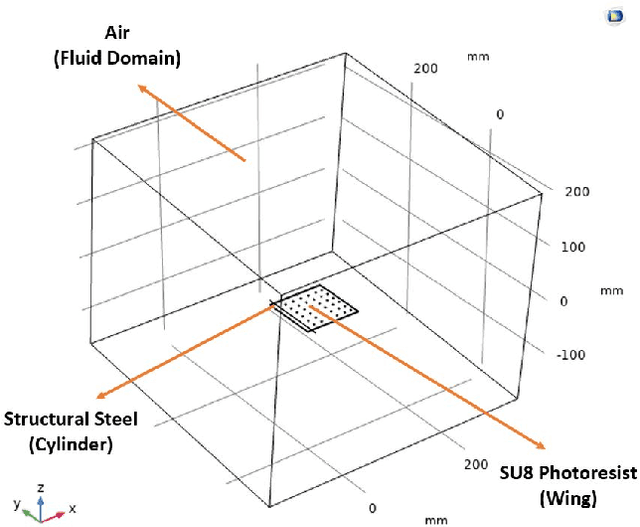
This study investigates the effects of porosity on flying creatures such as dragonflies, moths, hummingbirds, etc. wing and shows that pores can affect wing performance. These studies were performed by 3D porous flapping wing flow analyses on Comsol Multiphysics. In this study, we analyzed different numbers of the porous wing at different angles of inclination in order to see the effect of pores on lift and drag forces. To compare the results 9 different analyses were performed. In these analyses, airflow velocity was taken as 5 m/s, angle of attack as 5 degrees, frequency as 25 Hz, and flapping angle as 30 degrees. By keeping these values constant, the number of pores was changed to 36, 48, and 60, and the pore angles of inclination to 60, 70, and 80 degrees. Analyses were carried out by giving laminar flow to this wing designed in the Comsol Multiphysics program. The importance of pores was investigated by comparing the results of these analyses.