 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLDA-1B: Scaling Latent Dynamics Action Model via Universal Embodied Data Ingestion
Feb 12, 2026Recent robot foundation models largely rely on large-scale behavior cloning, which imitates expert actions but discards transferable dynamics knowledge embedded in heterogeneous embodied data. While the Unified World Model (UWM) formulation has the potential to leverage such diverse data, existing instantiations struggle to scale to foundation-level due to coarse data usage and fragmented datasets. We introduce LDA-1B, a robot foundation model that scales through universal embodied data ingestion by jointly learning dynamics, policy, and visual forecasting, assigning distinct roles to data of varying quality. To support this regime at scale, we assemble and standardize EI-30k, an embodied interaction dataset comprising over 30k hours of human and robot trajectories in a unified format. Scalable dynamics learning over such heterogeneous data is enabled by prediction in a structured DINO latent space, which avoids redundant pixel-space appearance modeling. Complementing this representation, LDA-1B employs a multi-modal diffusion transformer to handle asynchronous vision and action streams, enabling stable training at the 1B-parameter scale. Experiments in simulation and the real world show LDA-1B outperforms prior methods (e.g., $π_{0.5}$) by up to 21\%, 48\%, and 23\% on contact-rich, dexterous, and long-horizon tasks, respectively. Notably, LDA-1B enables data-efficient fine-tuning, gaining 10\% by leveraging 30\% low-quality trajectories typically harmful and discarded.
Time-Series Learning for Proactive Fault Prediction in Distributed Systems with Deep Neural Structures
May 27, 2025This paper addresses the challenges of fault prediction and delayed response in distributed systems by proposing an intelligent prediction method based on temporal feature learning. The method takes multi-dimensional performance metric sequences as input. We use a Gated Recurrent Unit (GRU) to model the evolution of system states over time. An attention mechanism is then applied to enhance key temporal segments, improving the model's ability to identify potential faults. On this basis, a feedforward neural network is designed to perform the final classification, enabling early warning of system failures. To validate the effectiveness of the proposed approach, comparative experiments and ablation analyses were conducted using data from a large-scale real-world cloud system. The experimental results show that the model outperforms various mainstream time-series models in terms of Accuracy, F1-Score, and AUC. This demonstrates strong prediction capability and stability. Furthermore, the loss function curve confirms the convergence and reliability of the training process. It indicates that the proposed method effectively learns system behavior patterns and achieves efficient fault detection.
Graph Neural Network-Based Collaborative Perception for Adaptive Scheduling in Distributed Systems
May 22, 2025This paper addresses the limitations of multi-node perception and delayed scheduling response in distributed systems by proposing a GNN-based multi-node collaborative perception mechanism. The system is modeled as a graph structure. Message-passing and state-update modules are introduced. A multi-layer graph neural network is constructed to enable efficient information aggregation and dynamic state inference among nodes. In addition, a perception representation method is designed by fusing local states with global features. This improves each node's ability to perceive the overall system status. The proposed method is evaluated within a customized experimental framework. A dataset featuring heterogeneous task loads and dynamic communication topologies is used. Performance is measured in terms of task completion rate, average latency, load balancing, and transmission efficiency. Experimental results show that the proposed method outperforms mainstream algorithms under various conditions, including limited bandwidth and dynamic structural changes. It demonstrates superior perception capabilities and cooperative scheduling performance. The model achieves rapid convergence and efficient responses to complex system states.
Deep Probabilistic Modeling of User Behavior for Anomaly Detection via Mixture Density Networks
May 13, 2025To improve the identification of potential anomaly patterns in complex user behavior, this paper proposes an anomaly detection method based on a deep mixture density network. The method constructs a Gaussian mixture model parameterized by a neural network, enabling conditional probability modeling of user behavior. It effectively captures the multimodal distribution characteristics commonly present in behavioral data. Unlike traditional classifiers that rely on fixed thresholds or a single decision boundary, this approach defines an anomaly scoring function based on probability density using negative log-likelihood. This significantly enhances the model's ability to detect rare and unstructured behaviors. Experiments are conducted on the real-world network user dataset UNSW-NB15. A series of performance comparisons and stability validation experiments are designed. These cover multiple evaluation aspects, including Accuracy, F1- score, AUC, and loss fluctuation. The results show that the proposed method outperforms several advanced neural network architectures in both performance and training stability. This study provides a more expressive and discriminative solution for user behavior modeling and anomaly detection. It strongly promotes the application of deep probabilistic modeling techniques in the fields of network security and intelligent risk control.
Joint Graph Convolution and Sequential Modeling for Scalable Network Traffic Estimation
May 12, 2025This study focuses on the challenge of predicting network traffic within complex topological environments. It introduces a spatiotemporal modeling approach that integrates Graph Convolutional Networks (GCN) with Gated Recurrent Units (GRU). The GCN component captures spatial dependencies among network nodes, while the GRU component models the temporal evolution of traffic data. This combination allows for precise forecasting of future traffic patterns. The effectiveness of the proposed model is validated through comprehensive experiments on the real-world Abilene network traffic dataset. The model is benchmarked against several popular deep learning methods. Furthermore, a set of ablation experiments is conducted to examine the influence of various components on performance, including changes in the number of graph convolution layers, different temporal modeling strategies, and methods for constructing the adjacency matrix. Results indicate that the proposed approach achieves superior performance across multiple metrics, demonstrating robust stability and strong generalization capabilities in complex network traffic forecasting scenarios.
Can Video Diffusion Model Reconstruct 4D Geometry?
Mar 27, 2025Reconstructing dynamic 3D scenes (i.e., 4D geometry) from monocular video is an important yet challenging problem. Conventional multiview geometry-based approaches often struggle with dynamic motion, whereas recent learning-based methods either require specialized 4D representation or sophisticated optimization. In this paper, we present Sora3R, a novel framework that taps into the rich spatiotemporal priors of large-scale video diffusion models to directly infer 4D pointmaps from casual videos. Sora3R follows a two-stage pipeline: (1) we adapt a pointmap VAE from a pretrained video VAE, ensuring compatibility between the geometry and video latent spaces; (2) we finetune a diffusion backbone in combined video and pointmap latent space to generate coherent 4D pointmaps for every frame. Sora3R operates in a fully feedforward manner, requiring no external modules (e.g., depth, optical flow, or segmentation) or iterative global alignment. Extensive experiments demonstrate that Sora3R reliably recovers both camera poses and detailed scene geometry, achieving performance on par with state-of-the-art methods for dynamic 4D reconstruction across diverse scenarios.
TrackNeRF: Bundle Adjusting NeRF from Sparse and Noisy Views via Feature Tracks
Aug 20, 2024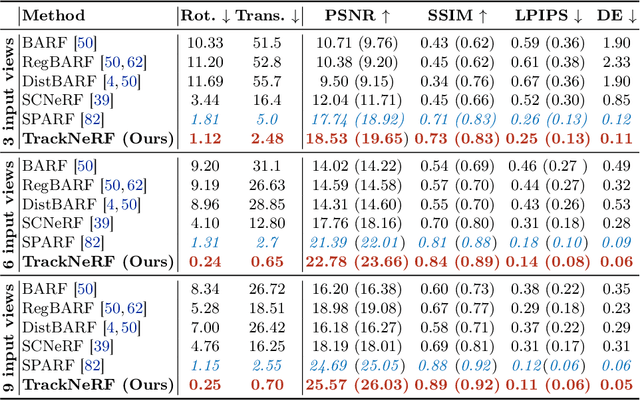
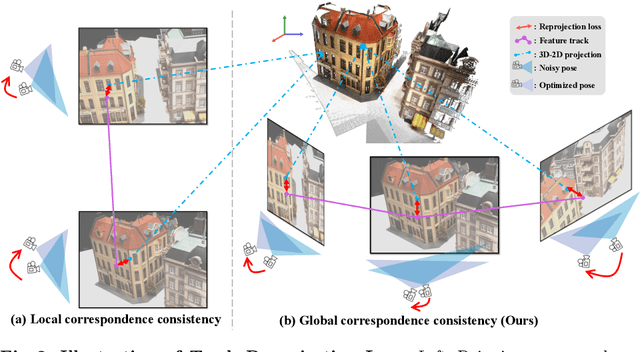
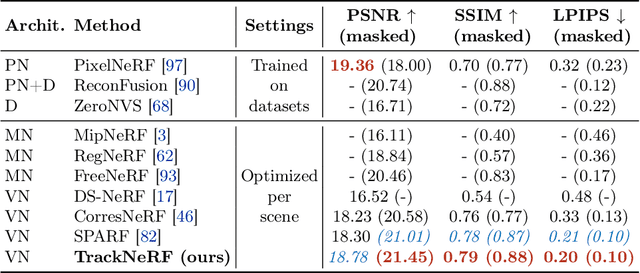
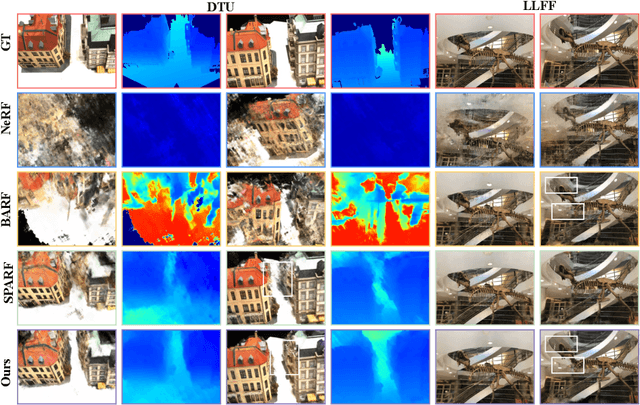
Neural radiance fields (NeRFs) generally require many images with accurate poses for accurate novel view synthesis, which does not reflect realistic setups where views can be sparse and poses can be noisy. Previous solutions for learning NeRFs with sparse views and noisy poses only consider local geometry consistency with pairs of views. Closely following \textit{bundle adjustment} in Structure-from-Motion (SfM), we introduce TrackNeRF for more globally consistent geometry reconstruction and more accurate pose optimization. TrackNeRF introduces \textit{feature tracks}, \ie connected pixel trajectories across \textit{all} visible views that correspond to the \textit{same} 3D points. By enforcing reprojection consistency among feature tracks, TrackNeRF encourages holistic 3D consistency explicitly. Through extensive experiments, TrackNeRF sets a new benchmark in noisy and sparse view reconstruction. In particular, TrackNeRF shows significant improvements over the state-of-the-art BARF and SPARF by $\sim8$ and $\sim1$ in terms of PSNR on DTU under various sparse and noisy view setups. The code is available at \href{https://tracknerf.github.io/}.
Vivid-ZOO: Multi-View Video Generation with Diffusion Model
Jun 12, 2024



While diffusion models have shown impressive performance in 2D image/video generation, diffusion-based Text-to-Multi-view-Video (T2MVid) generation remains underexplored. The new challenges posed by T2MVid generation lie in the lack of massive captioned multi-view videos and the complexity of modeling such multi-dimensional distribution. To this end, we propose a novel diffusion-based pipeline that generates high-quality multi-view videos centered around a dynamic 3D object from text. Specifically, we factor the T2MVid problem into viewpoint-space and time components. Such factorization allows us to combine and reuse layers of advanced pre-trained multi-view image and 2D video diffusion models to ensure multi-view consistency as well as temporal coherence for the generated multi-view videos, largely reducing the training cost. We further introduce alignment modules to align the latent spaces of layers from the pre-trained multi-view and the 2D video diffusion models, addressing the reused layers' incompatibility that arises from the domain gap between 2D and multi-view data. In support of this and future research, we further contribute a captioned multi-view video dataset. Experimental results demonstrate that our method generates high-quality multi-view videos, exhibiting vivid motions, temporal coherence, and multi-view consistency, given a variety of text prompts.
Exploring Learngene via Stage-wise Weight Sharing for Initializing Variable-sized Models
Apr 25, 2024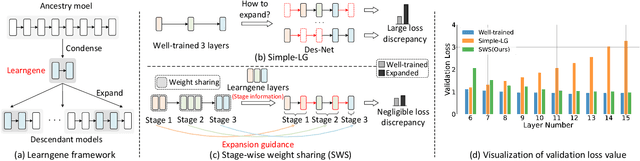
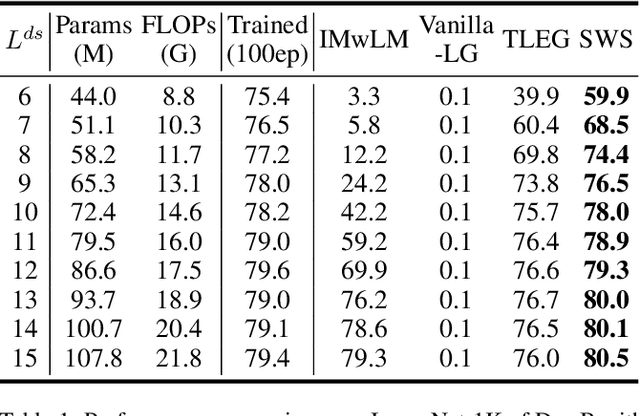
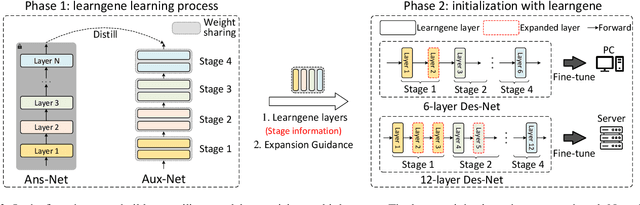
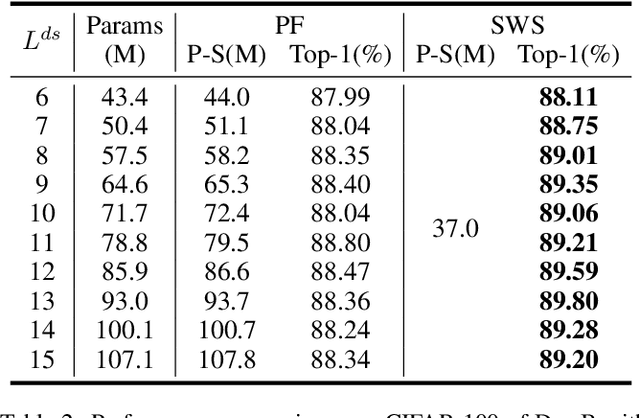
In practice, we usually need to build variable-sized models adapting for diverse resource constraints in different application scenarios, where weight initialization is an important step prior to training. The Learngene framework, introduced recently, firstly learns one compact part termed as learngene from a large well-trained model, after which learngene is expanded to initialize variable-sized models. In this paper, we start from analysing the importance of guidance for the expansion of well-trained learngene layers, inspiring the design of a simple but highly effective Learngene approach termed SWS (Stage-wise Weight Sharing), where both learngene layers and their learning process critically contribute to providing knowledge and guidance for initializing models at varying scales. Specifically, to learn learngene layers, we build an auxiliary model comprising multiple stages where the layer weights in each stage are shared, after which we train it through distillation. Subsequently, we expand these learngene layers containing stage information at their corresponding stage to initialize models of variable depths. Extensive experiments on ImageNet-1K demonstrate that SWS achieves consistent better performance compared to many models trained from scratch, while reducing around 6.6x total training costs. In some cases, SWS performs better only after 1 epoch tuning. When initializing variable-sized models adapting for different resource constraints, SWS achieves better results while reducing around 20x parameters stored to initialize these models and around 10x pre-training costs, in contrast to the pre-training and fine-tuning approach.
Edge-aware Plug-and-play Scheme for Semantic Segmentation
Mar 18, 2023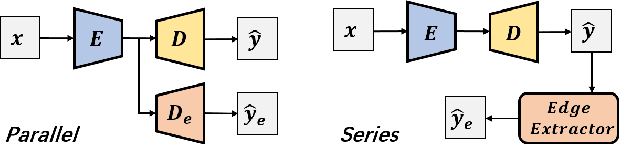
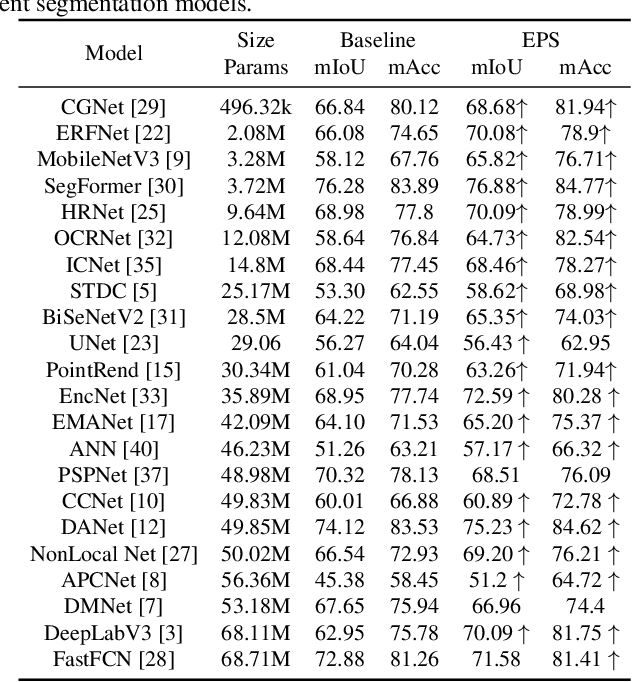
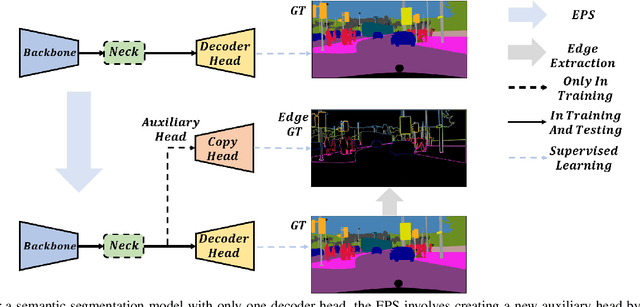
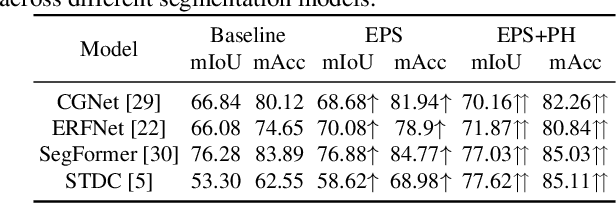
Semantic segmentation is a classic and fundamental computer vision problem dedicated to assigning each pixel with its corresponding class. Some recent methods introduce edge-based information for improving the segmentation performance. However these methods are specific and limited to certain network architectures, and they can not be transferred to other models or tasks. Therefore, we propose an abstract and universal edge supervision method called Edge-aware Plug-and-play Scheme (EPS), which can be easily and quickly applied to any semantic segmentation models. The core is edge-width/thickness preserving guided for semantic segmentation. The EPS first extracts the Edge Ground Truth (Edge GT) with a predefined edge thickness from the training data; and then for any network architecture, it directly copies the decoder head for the auxiliary task with the Edge GT supervision. To ensure the edge thickness preserving consistantly, we design a new boundarybased loss, called Polar Hausdorff (PH) Loss, for the auxiliary supervision. We verify the effectiveness of our EPS on the Cityscapes dataset using 22 models. The experimental results indicate that the proposed method can be seamlessly integrated into any state-of-the-art (SOTA) models with zero modification, resulting in promising enhancement of the segmentation performance.