 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAchieving Cloud-Grade SLOs for Local Mixture-of-Experts Inference through CPU-GPU Hybrid Design
Jun 09, 2026Local deployment of large Mixture-of-Experts (MoE) models falls short of the service quality achieved in cloud-scale environments, even under low-concurrency workloads. We identify four key gaps in local MoE inference: reliance on capacity-reduced models (quantized, distilled, rerouted), inability to meet 30-second TTFT for long prefills (more than 12K), sub-baseline decode throughput (under 20 tokens/s), and poor concurrency under mixed prefill-decode and batched decode workloads. We present a CPU-GPU hybrid system that achieves cloud-level SLOs on dual-socket commodity CPUs and consumer GPUs by (1) stream-loading prefill (SLP), boosting prefill throughput to 1,200 tokens/s and enabling 32K prompts within 30 seconds; (2) distributed SLP (DSLP) with SmallEP expert parallelism, reaching 1,800 tokens/s and 45K prompts in 30 seconds on two RTX 5090s; (3) intra-node prefill-decode disaggregation with zero-copy shared weights and a dual-batch attention-MoE overlap scheme, sustaining concurrency with under 15 percent latency increase and 50 percent throughput gains; (4) an AVX-512-optimized FP8 GEMV kernel, enabling native CPU FP8 inference while delivering 4-5x lower CPU latency; and (5) fine-grained CPU parallelism that attains 28 tokens/s on INT4 DeepSeek-V3 and 21.5 tokens/s on intact FP8 V3. Evaluations show our system delivers cloud-level QoS for flagship MoE models on consumer CPU-GPU platforms, reshaping local deployment with intact, original-precision inference and enabling high-quality, cost-effective access without datacenter infrastructure.
ToMPC: Task-oriented Model Predictive Control via ADMM for Safe Robotic Manipulation
Mar 14, 2026This paper proposes a task-oriented model predictive control (ToMPC) framework for safe and efficient robotic manipulation in open workspaces. The framework unifies collision-free motion and robot-environment interaction to address diverse scenarios. Additionally, it introduces task-oriented obstacle avoidance that leverages kinematic redundancy to enhance manipulation efficiency in obstructed environments. This complex optimization problem is solved by the alternating direction method of multipliers (ADMM), which decomposes the problem into two subproblems tackled by differential dynamic programming (DDP) and quadratic programming (QP), respectively. The effectiveness of this approach is validated in simulation and hardware experiments on a Franka Panda robotic manipulator. Results demonstrate that the framework can plan motion and/or force trajectories in real time, maximize the manipulation range while avoiding obstacles, and strictly adhere to safety-related hard constraints.
Dual-Quadruped Collaborative Transportation in Narrow Environments via Safe Reinforcement Learning
Feb 18, 2026Collaborative transportation, where multiple robots collaboratively transport a payload, has garnered significant attention in recent years. While ensuring safe and high-performance inter-robot collaboration is critical for effective task execution, it is difficult to pursue in narrow environments where the feasible region is extremely limited. To address this challenge, we propose a novel approach for dual-quadruped collaborative transportation via safe reinforcement learning (RL). Specifically, we model the task as a fully cooperative constrained Markov game, where collision avoidance is formulated as constraints. We introduce a cost-advantage decomposition method that enforces the sum of team constraints to remain below an upper bound, thereby guaranteeing task safety within an RL framework. Furthermore, we propose a constraint allocation method that assigns shared constraints to individual robots to maximize the overall task reward, encouraging autonomous task-assignment among robots, thereby improving collaborative task performance. Simulation and real-time experimental results demonstrate that the proposed approach achieves superior performance and a higher success rate in dual-quadruped collaborative transportation compared to existing methods.
SparseFocus: Learning-based One-shot Autofocus for Microscopy with Sparse Content
Feb 10, 2025



Autofocus is necessary for high-throughput and real-time scanning in microscopic imaging. Traditional methods rely on complex hardware or iterative hill-climbing algorithms. Recent learning-based approaches have demonstrated remarkable efficacy in a one-shot setting, avoiding hardware modifications or iterative mechanical lens adjustments. However, in this paper, we highlight a significant challenge that the richness of image content can significantly affect autofocus performance. When the image content is sparse, previous autofocus methods, whether traditional climbing-hill or learning-based, tend to fail. To tackle this, we propose a content-importance-based solution, named SparseFocus, featuring a novel two-stage pipeline. The first stage measures the importance of regions within the image, while the second stage calculates the defocus distance from selected important regions. To validate our approach and benefit the research community, we collect a large-scale dataset comprising millions of labelled defocused images, encompassing both dense, sparse and extremely sparse scenarios. Experimental results show that SparseFocus surpasses existing methods, effectively handling all levels of content sparsity. Moreover, we integrate SparseFocus into our Whole Slide Imaging (WSI) system that performs well in real-world applications. The code and dataset will be made available upon the publication of this paper.
MaIR: A Locality- and Continuity-Preserving Mamba for Image Restoration
Dec 28, 2024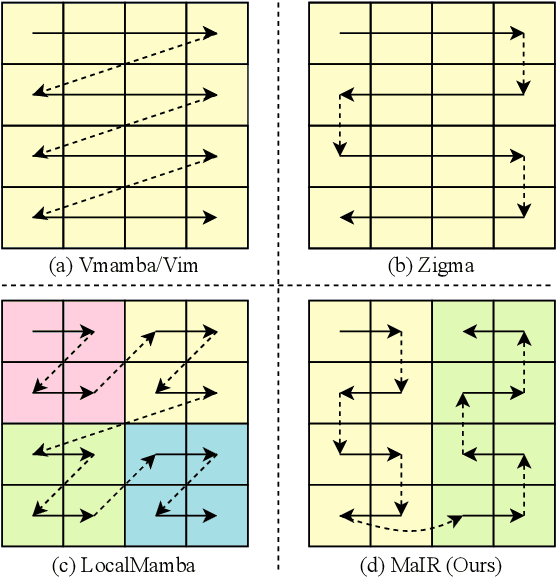
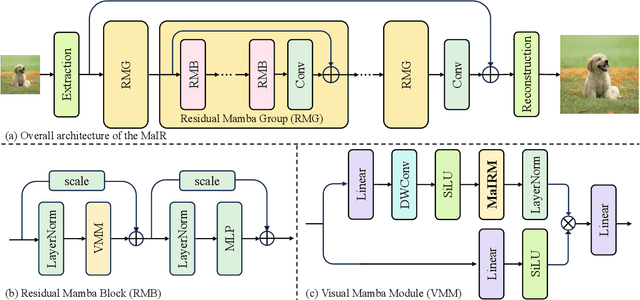
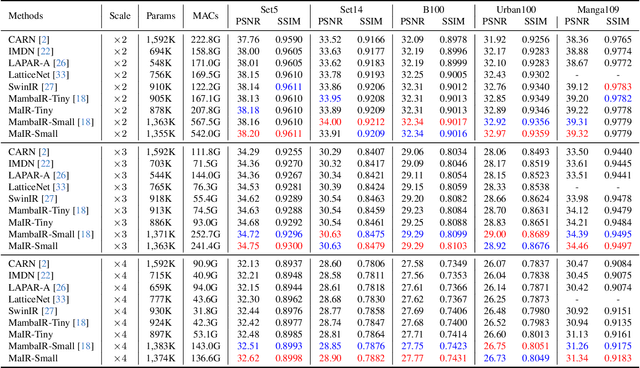
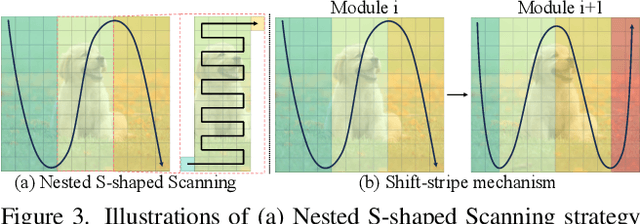
Recent advancements in Mamba have shown promising results in image restoration. These methods typically flatten 2D images into multiple distinct 1D sequences along rows and columns, process each sequence independently using selective scan operation, and recombine them to form the outputs. However, such a paradigm overlooks two vital aspects: i) the local relationships and spatial continuity inherent in natural images, and ii) the discrepancies among sequences unfolded through totally different ways. To overcome the drawbacks, we explore two problems in Mamba-based restoration methods: i) how to design a scanning strategy preserving both locality and continuity while facilitating restoration, and ii) how to aggregate the distinct sequences unfolded in totally different ways. To address these problems, we propose a novel Mamba-based Image Restoration model (MaIR), which consists of Nested S-shaped Scanning strategy (NSS) and Sequence Shuffle Attention block (SSA). Specifically, NSS preserves locality and continuity of the input images through the stripe-based scanning region and the S-shaped scanning path, respectively. SSA aggregates sequences through calculating attention weights within the corresponding channels of different sequences. Thanks to NSS and SSA, MaIR surpasses 40 baselines across 14 challenging datasets, achieving state-of-the-art performance on the tasks of image super-resolution, denoising, deblurring and dehazing. Our codes will be available after acceptance.
Multi-Layered Safety of Redundant Robot Manipulators via Task-Oriented Planning and Control
Oct 23, 2024Ensuring safety is crucial to promote the application of robot manipulators in open workspace. Factors such as sensor errors or unpredictable collisions make the environment full of uncertainties. In this work, we investigate these potential safety challenges on redundant robot manipulators, and propose a task-oriented planning and control framework to achieve multi-layered safety while maintaining efficient task execution. Our approach consists of two main parts: a task-oriented trajectory planner based on multiple-shooting model predictive control method, and a torque controller that allows safe and efficient collision reaction using only proprioceptive data. Through extensive simulations and real-hardware experiments, we demonstrate that the proposed framework can effectively handle uncertain static or dynamic obstacles, and perform disturbance resistance in manipulation tasks when unforeseen contacts occur. All code will be open-sourced to benefit the community.
A Two-Stage Generative Model with CycleGAN and Joint Diffusion for MRI-based Brain Tumor Detection
Nov 06, 2023Accurate detection and segmentation of brain tumors is critical for medical diagnosis. However, current supervised learning methods require extensively annotated images and the state-of-the-art generative models used in unsupervised methods often have limitations in covering the whole data distribution. In this paper, we propose a novel framework Two-Stage Generative Model (TSGM) that combines Cycle Generative Adversarial Network (CycleGAN) and Variance Exploding stochastic differential equation using joint probability (VE-JP) to improve brain tumor detection and segmentation. The CycleGAN is trained on unpaired data to generate abnormal images from healthy images as data prior. Then VE-JP is implemented to reconstruct healthy images using synthetic paired abnormal images as a guide, which alters only pathological regions but not regions of healthy. Notably, our method directly learned the joint probability distribution for conditional generation. The residual between input and reconstructed images suggests the abnormalities and a thresholding method is subsequently applied to obtain segmentation results. Furthermore, the multimodal results are weighted with different weights to improve the segmentation accuracy further. We validated our method on three datasets, and compared with other unsupervised methods for anomaly detection and segmentation. The DSC score of 0.8590 in BraTs2020 dataset, 0.6226 in ITCS dataset and 0.7403 in In-house dataset show that our method achieves better segmentation performance and has better generalization.
Relationship Quantification of Image Degradations
Dec 08, 2022In this paper, we study two challenging but less-touched problems in image restoration, namely, i) how to quantify the relationship between different image degradations and ii) how to improve the performance of a specific restoration task using the quantified relationship. To tackle the first challenge, Degradation Relationship Index (DRI) is proposed to measure the degradation relationship, which is defined as the drop rate difference in the validation loss between two models, i.e., one is trained using the anchor task only and another is trained using the anchor and the auxiliary tasks. Through quantifying the relationship between different degradations using DRI, we empirically observe that i) the degradation combination proportion is crucial to the image restoration performance. In other words, the combinations with only appropriate degradation proportions could improve the performance of the anchor restoration; ii) a positive DRI always predicts the performance improvement of image restoration. Based on the observations, we propose an adaptive Degradation Proportion Determination strategy (DPD) which could improve the performance of the anchor restoration task by using another restoration task as auxiliary. Extensive experimental results verify the effective of our method by taking image dehazing as the anchor task and denoising, desnowing, and deraining as the auxiliary tasks. The code will be released after acceptance.
Generalized Iterative Super-Twisting Sliding Mode Control: A Case Study on Flexure-Joint Dual-Drive H-Gantry Stage
Mar 23, 2021
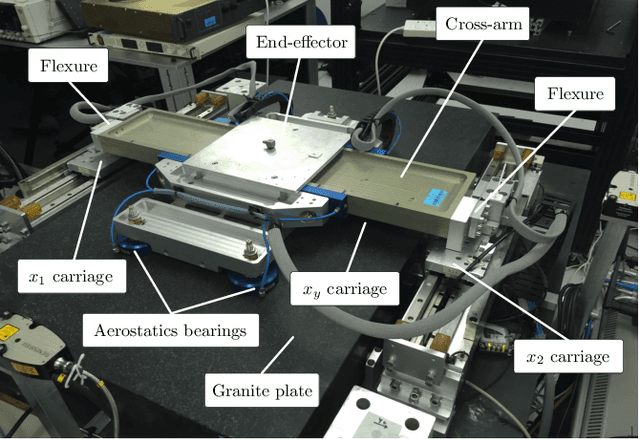
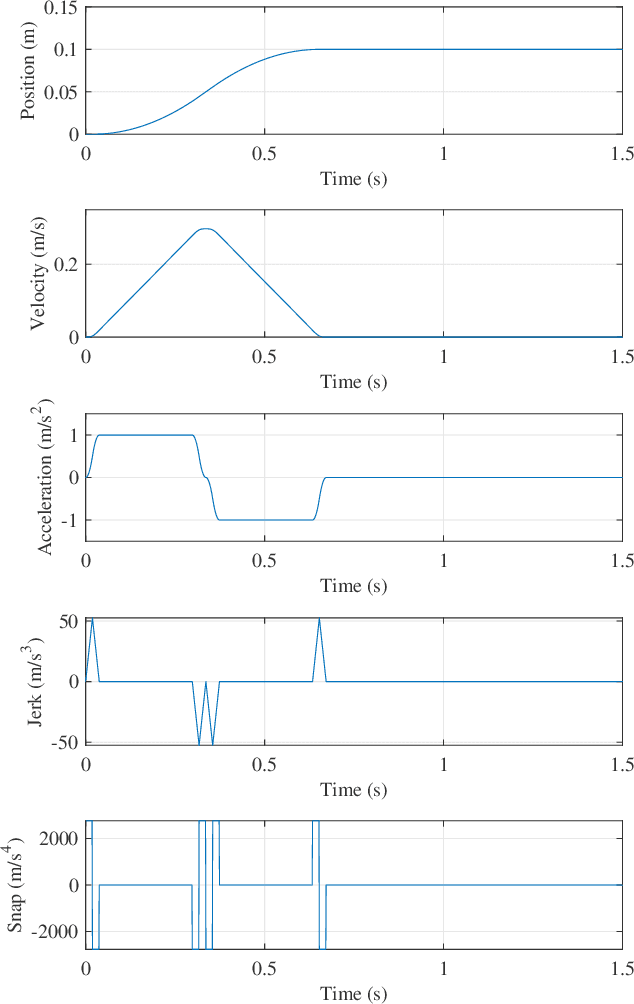

Mechatronic systems are commonly used in the industry, where fast and accurate motion performance is always required to guarantee manufacturing precision and efficiency. Nevertheless, the system model and parameters are difficult to be obtained accurately. Moreover, the high-order modes, strong coupling in the multi-axis systems, or unmodeled frictions will bring uncertain dynamics to the system. To overcome the above-mentioned issues and enhance the motion performance, this paper introduces a novel intelligent and totally model-free control method for mechatronic systems with unknown dynamics. In detail, a 2-degree-of-freedom (DOF) architecture is designed, which organically merges a generalized super-twisting algorithm with a unique iterative learning law. The controller solely utilizes the input-output data collected in iterations such that it works without any knowledge of the system parameters. The rigorous proof of convergence ability is given and a case study on flexture-joint dual-drive H-gantry stage is shown to validate the effectiveness of the proposed method.
A Multimodal Alerting System for Online Class Quality Assurance
Sep 01, 2019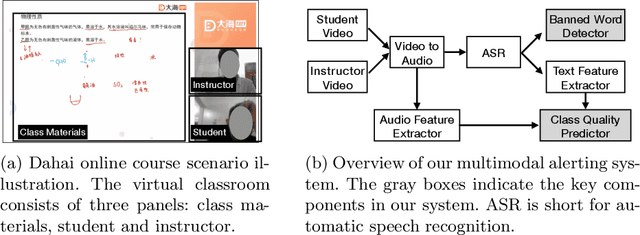
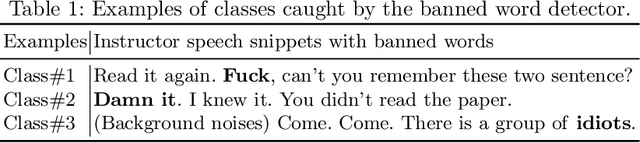
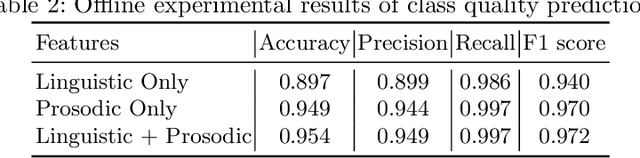
Online 1 on 1 class is created for more personalized learning experience. It demands a large number of teaching resources, which are scarce in China. To alleviate this problem, we build a platform (marketplace), i.e., \emph{Dahai} to allow college students from top Chinese universities to register as part-time instructors for the online 1 on 1 classes. To warn the unqualified instructors and ensure the overall education quality, we build a monitoring and alerting system by utilizing multimodal information from the online environment. Our system mainly consists of two key components: banned word detector and class quality predictor. The system performance is demonstrated both offline and online. By conducting experimental evaluation of real-world online courses, we are able to achieve 74.3\% alerting accuracy in our production environment.