 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIncremental Few-Shot Learning via Implanting and Compressing
Apr 07, 2022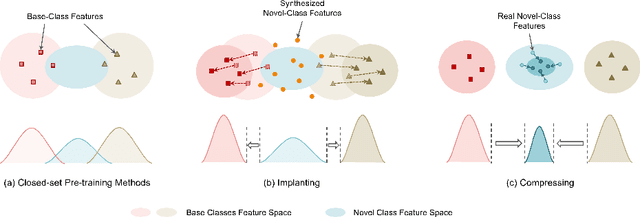
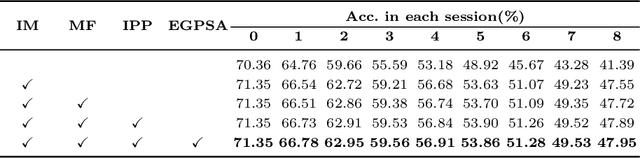
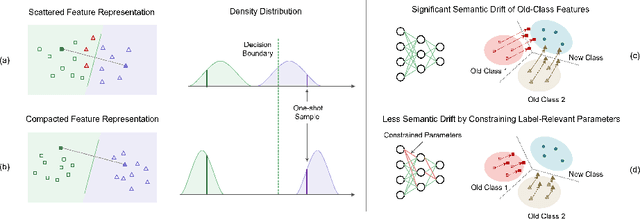
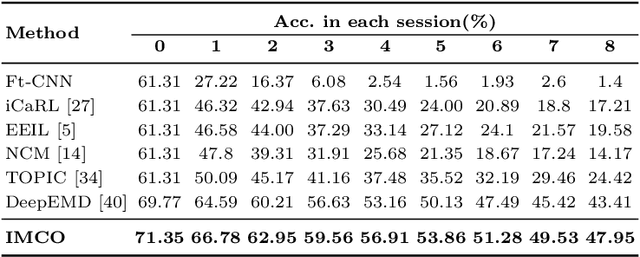
This work focuses on tackling the challenging but realistic visual task of Incremental Few-Shot Learning (IFSL), which requires a model to continually learn novel classes from only a few examples while not forgetting the base classes on which it was pre-trained. Our study reveals that the challenges of IFSL lie in both inter-class separation and novel-class representation. Dur to intra-class variation, a novel class may implicitly leverage the knowledge from multiple base classes to construct its feature representation. Hence, simply reusing the pre-trained embedding space could lead to a scattered feature distribution and result in category confusion. To address such issues, we propose a two-step learning strategy referred to as \textbf{Im}planting and \textbf{Co}mpressing (\textbf{IMCO}), which optimizes both feature space partition and novel class reconstruction in a systematic manner. Specifically, in the \textbf{Implanting} step, we propose to mimic the data distribution of novel classes with the assistance of data-abundant base set, so that a model could learn semantically-rich features that are beneficial for discriminating between the base and other unseen classes. In the \textbf{Compressing} step, we adapt the feature extractor to precisely represent each novel class for enhancing intra-class compactness, together with a regularized parameter updating rule for preventing aggressive model updating. Finally, we demonstrate that IMCO outperforms competing baselines with a significant margin, both in image classification task and more challenging object detection task.
Velocity Obstacle Based Risk-Bounded Motion Planning for Stochastic Multi-Agent Systems
Feb 20, 2022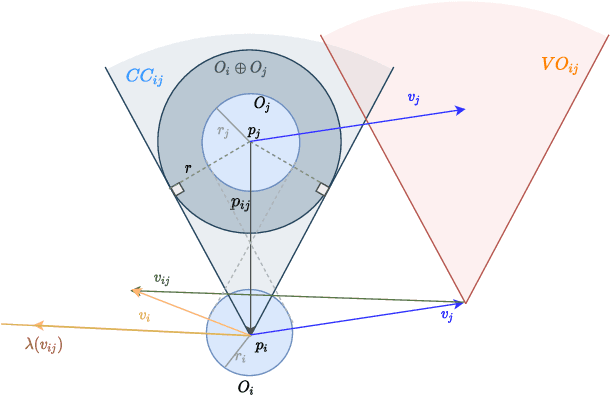
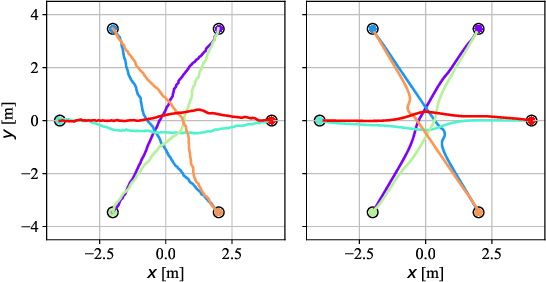
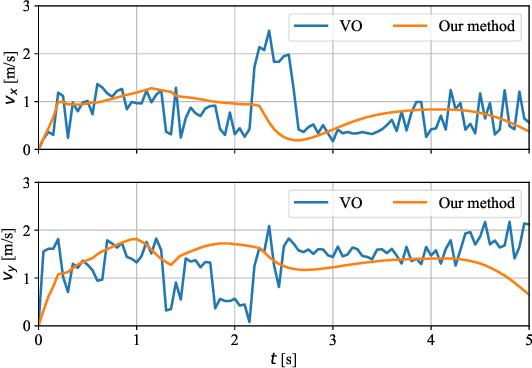
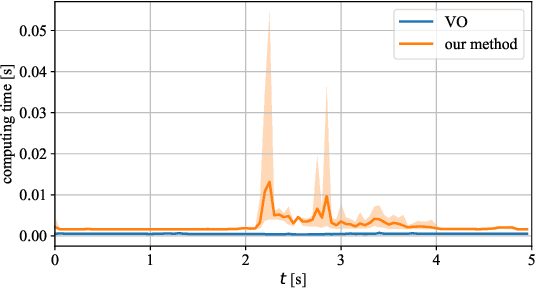
In this paper, we present an innovative risk-bounded motion planning methodology for stochastic multi-agent systems. For this methodology, the disturbance, noise, and model uncertainty are considered; and a velocity obstacle method is utilized to formulate the collision-avoidance constraints in the velocity space. With the exploitation of geometric information of static obstacles and velocity obstacles, a distributed optimization problem with probabilistic chance constraints is formulated for the stochastic multi-agent system. Consequently, collision-free trajectories are generated under a prescribed collision risk bound. Due to the existence of probabilistic and disjunctive constraints, the distributed chance-constrained optimization problem is reformulated as a mixed-integer program by introducing the binary variable to improve computational efficiency. This approach thus renders it possible to execute the motion planning task in the velocity space instead of the position space, which leads to smoother collision-free trajectories for multi-agent systems and higher computational efficiency. Moreover, the risk of potential collisions is bounded with this robust motion planning methodology. To validate the effectiveness of the methodology, different scenarios for multiple agents are investigated, and the simulation results clearly show that the proposed approach can generate high-quality trajectories under a predefined collision risk bound and avoid potential collisions effectively in the velocity space.
Receding Horizon Motion Planning for Multi-Agent Systems: A Velocity Obstacle Based Probabilistic Method
Mar 24, 2021
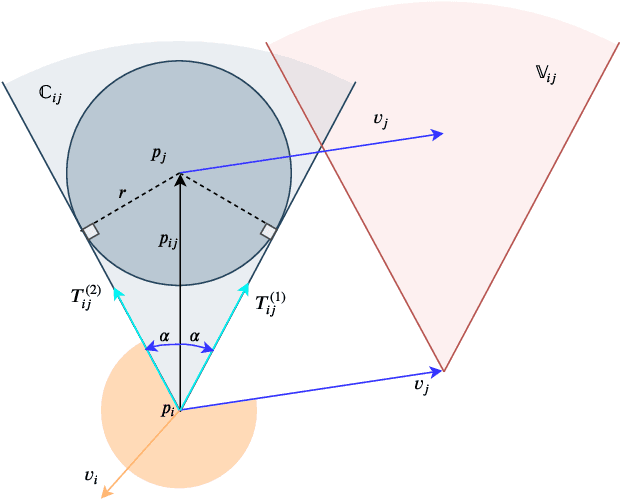
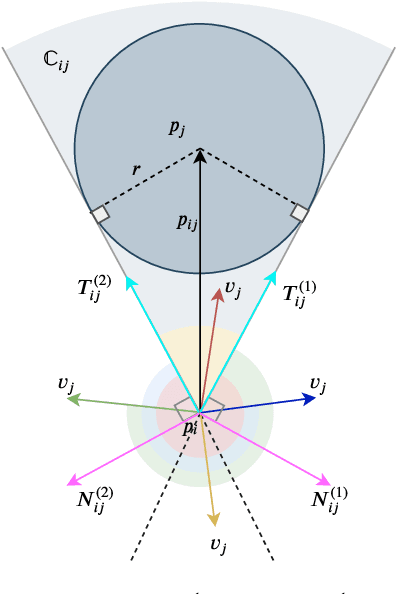
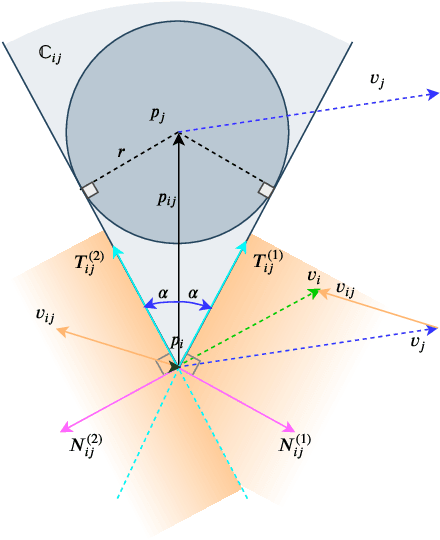
In this paper, a novel and innovative methodology for feasible motion planning in the multi-agent system is developed. On the basis of velocity obstacles characteristics, the chance constraints are formulated in the receding horizon control (RHC) problem, and geometric information of collision cones is used to generate the feasible regions of velocities for the host agent. By this approach, the motion planning is conducted at the velocity level instead of the position level. Thus, it guarantees a safer collision-free trajectory for the multi-agent system, especially for the systems with high-speed moving agents. Moreover, a probability threshold of potential collisions can be satisfied during the motion planning process. In order to validate the effectiveness of the methodology, different scenarios for multiple agents are investigated, and the simulation results clearly show that the proposed approach can effectively avoid potential collisions with a collision probability less than a specific threshold.
Generalized Iterative Super-Twisting Sliding Mode Control: A Case Study on Flexure-Joint Dual-Drive H-Gantry Stage
Mar 23, 2021
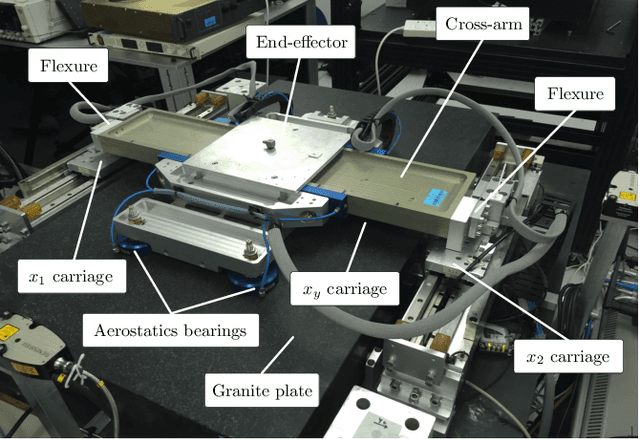

Mechatronic systems are commonly used in the industry, where fast and accurate motion performance is always required to guarantee manufacturing precision and efficiency. Nevertheless, the system model and parameters are difficult to be obtained accurately. Moreover, the high-order modes, strong coupling in the multi-axis systems, or unmodeled frictions will bring uncertain dynamics to the system. To overcome the above-mentioned issues and enhance the motion performance, this paper introduces a novel intelligent and totally model-free control method for mechatronic systems with unknown dynamics. In detail, a 2-degree-of-freedom (DOF) architecture is designed, which organically merges a generalized super-twisting algorithm with a unique iterative learning law. The controller solely utilizes the input-output data collected in iterations such that it works without any knowledge of the system parameters. The rigorous proof of convergence ability is given and a case study on flexture-joint dual-drive H-gantry stage is shown to validate the effectiveness of the proposed method.
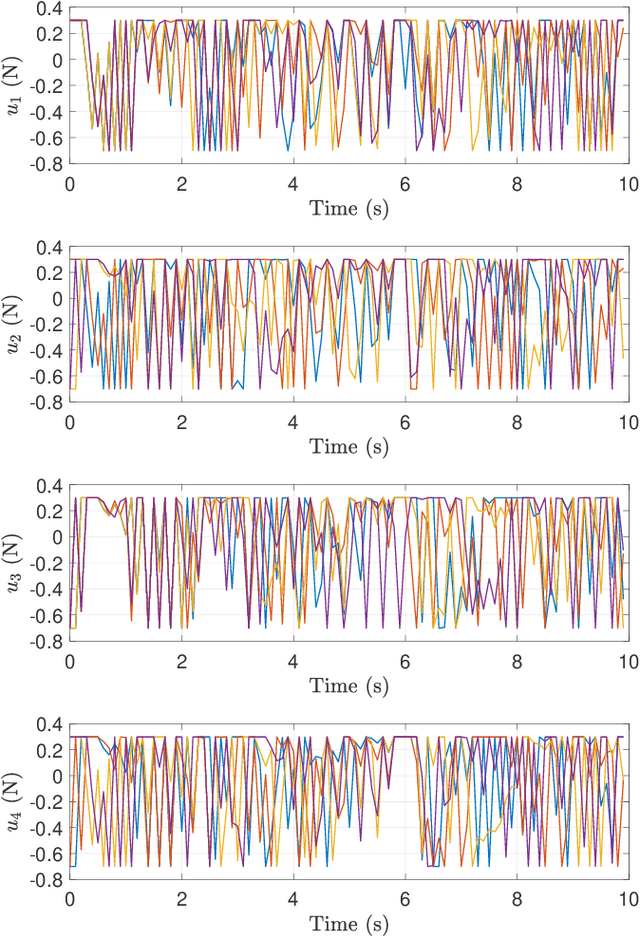
Neural Network iLQR: A New Reinforcement Learning Architecture
Nov 21, 2020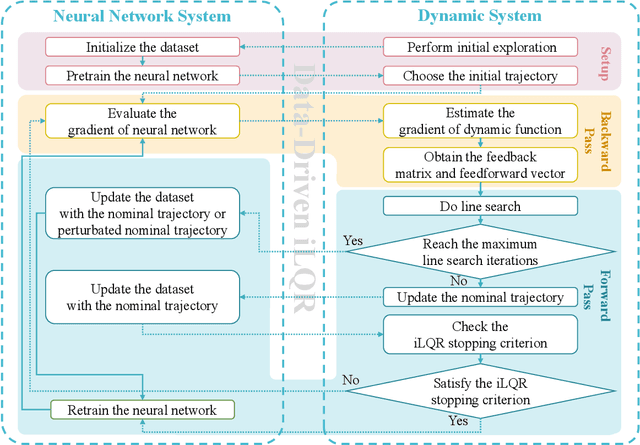
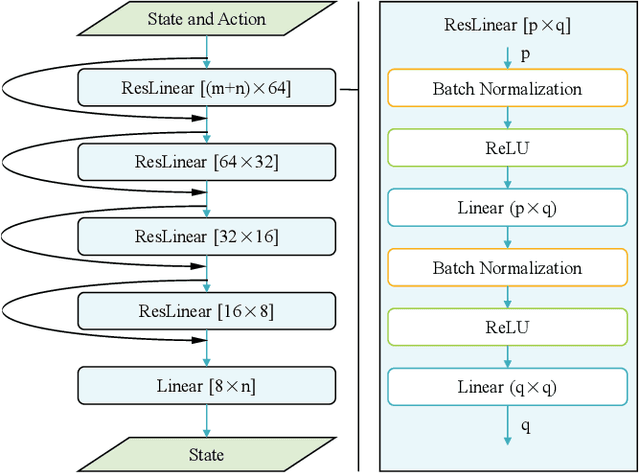
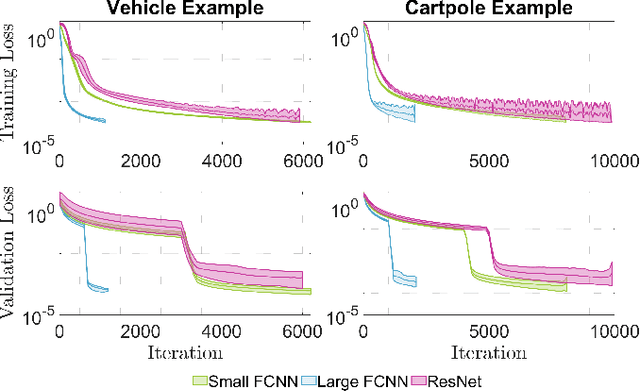
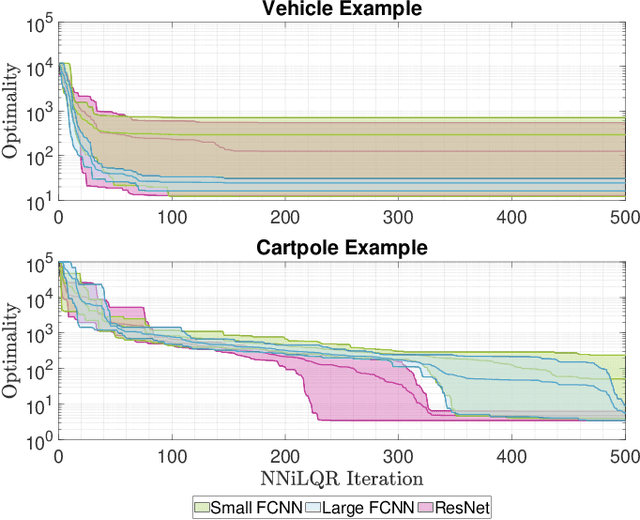
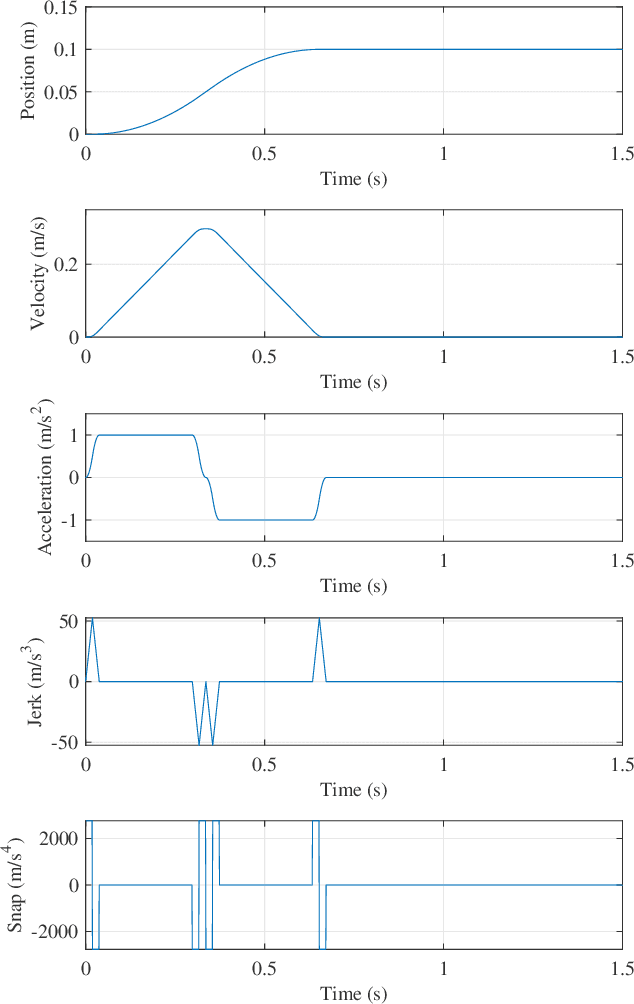
As a notable machine learning paradigm, the research efforts in the context of reinforcement learning have certainly progressed leaps and bounds. When compared with reinforcement learning methods with the given system model, the methodology of the reinforcement learning architecture based on the unknown model generally exhibits significantly broader universality and applicability. In this work, a new reinforcement learning architecture is developed and presented without the requirement of any prior knowledge of the system model, which is termed as an approach of a "neural network iterative linear quadratic regulator (NNiLQR)". Depending solely on measurement data, this method yields a completely new non-parametric routine for the establishment of the optimal policy (without the necessity of system modeling) through iterative refinements of the neural network system. Rather importantly, this approach significantly outperforms the classical iterative linear quadratic regulator (iLQR) method in terms of the given objective function because of the innovative utilization of further exploration in the methodology. As clearly indicated from the results attained in two illustrative examples, these significant merits of the NNiLQR method are demonstrated rather evidently.
Data-Driven Predictive Control for Multi-Agent Decision Making With Chance Constraints
Nov 06, 2020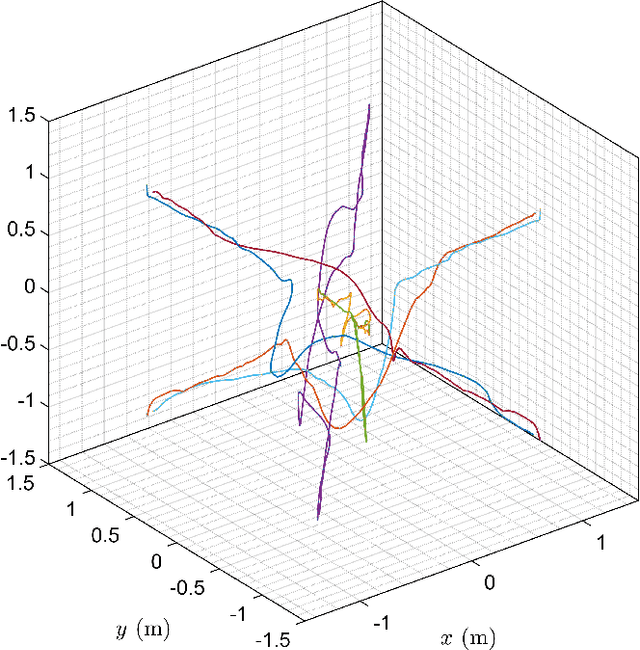


In the recent literature, significant and substantial efforts have been dedicated to the important area of multi-agent decision-making problems. Particularly here, the model predictive control (MPC) methodology has demonstrated its effectiveness in various applications, such as mobile robots, unmanned vehicles, and drones. Nevertheless, in many specific scenarios involving the MPC methodology, accurate and effective system identification is a commonly encountered challenge. As a consequence, the overall system performance could be significantly weakened in outcome when the traditional MPC algorithm is adopted under such circumstances. To cater to this rather major shortcoming, this paper investigates an alternate data-driven approach to solve the multi-agent decision-making problem. Utilizing an innovative modified methodology with suitable closed-loop input/output measurements that comply with the appropriate persistency of excitation condition, a non-parametric predictive model is suitably constructed. This non-parametric predictive model approach in the work here attains the key advantage of alleviating the rather heavy computational burden encountered in the optimization procedures typical in alternative methodologies requiring open-loop input/output measurement data collection and parametric system identification. Then with a conservative approximation of probabilistic chance constraints for the MPC problem, a resulting deterministic optimization problem is formulated and solved efficiently and effectively. In the work here, this intuitive data-driven approach is also shown to preserve good robustness properties. Finally, a multi-drone system is used to demonstrate the practical appeal and highly effective outcome of this promising development in achieving very good system performance.
Accelerated Hierarchical ADMM for Nonconvex Optimization in Multi-Agent Decision Making
Nov 01, 2020
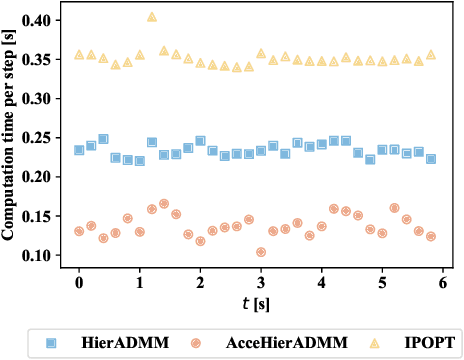
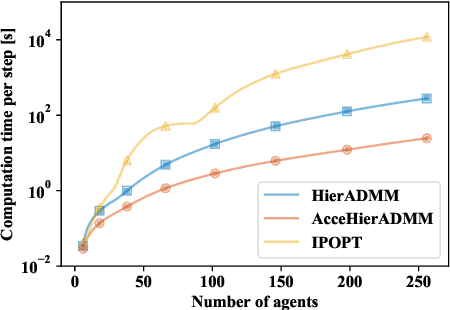
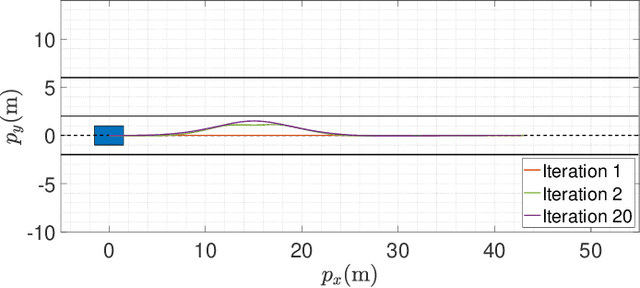
Distributed optimization is widely used to solve large-scale problems effectively in a localized and coordinated manner. Thus, it is noteworthy that the methodology of distributed model predictive control (DMPC) has become a promising approach to achieve effective outcomes; and particularly in decision-making tasks for multi-agent systems. However, the typical deployment of such DMPC frameworks would lead to involvement of nonlinear processes with a large number of nonconvex constraints. Noting all these attendant constraints and limitations, the development and innovation of a hierarchical three-block alternating direction method of multipliers (ADMM) approach is presented in the work here to solve the nonconvex optimization problem that arises for such a decision-making problem in multi-agent systems. Firstly thus, an additional slack variable is introduced to relax the original large-scale nonconvex optimization problem; such that the intractable nonconvex coupling constraints are suitably related to the distributed agents. Then, the approach with a hierarchical ADMM that contains outer loop iteration by the augmented Lagrangian method (ALM), and inner loop iteration by three-block semi-proximal ADMM, is utilized to solve the resulting relaxed nonconvex optimization problem. Additionally, it is shown that the appropriate desired stationary point exists for the procedures of the hierarchical stages for convergence in the algorithm. Next, the approximate optimization with a barrier method is then applied to accelerate the computational efficiency. Finally, a multi-agent system involving decision-making for multiple unmanned aerial vehicles (UAVs) is utilized to demonstrate the effectiveness of the proposed method in terms of attained performance and computational efficiency.
Alternating Direction Method of Multipliers for Constrained Iterative LQR in Autonomous Driving
Nov 01, 2020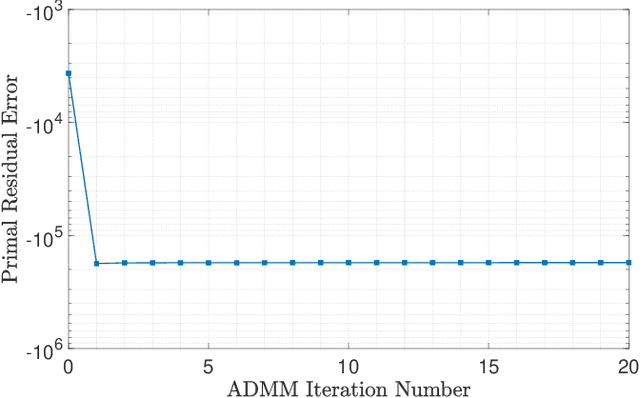
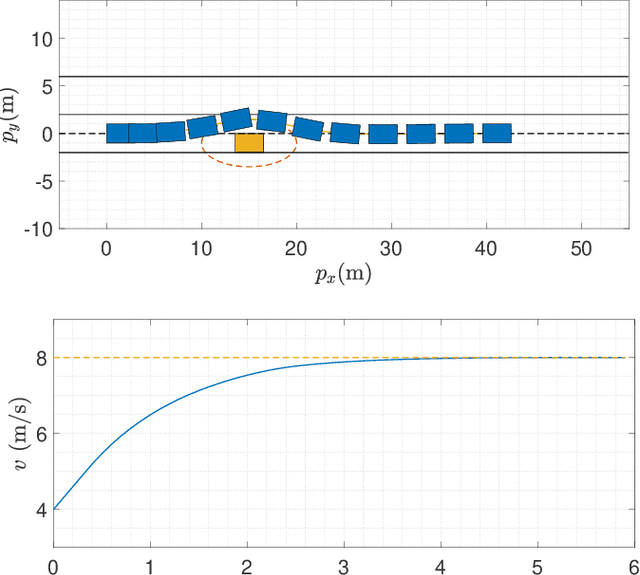
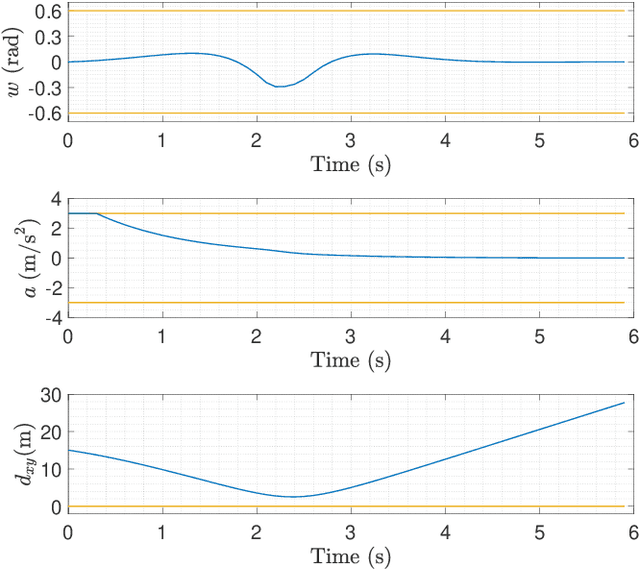
In the context of autonomous driving, the iterative linear quadratic regulator (iLQR) is known to be an efficient approach to deal with the nonlinear vehicle models in motion planning problems. Particularly, the constrained iLQR algorithm has shown noteworthy advantageous outcomes of computation efficiency in achieving motion planning tasks under general constraints of different types. However, the constrained iLQR methodology requires a feasible trajectory at the first iteration as a prerequisite. Also, the methodology leaves open the possibility for incorporation of fast, efficient, and effective optimization methods (i.e., fast-solvers) to further speed up the optimization process such that the requirements of real-time implementation can be successfully fulfilled. In this paper, a well-defined and commonly-encountered motion planning problem is formulated under nonlinear vehicle dynamics and various constraints, and an alternating direction method of multipliers (ADMM) is developed to determine the optimal control actions. With this development, the approach is able to circumvent the feasibility requirement of the trajectory at the first iteration. An illustrative example of motion planning in autonomous vehicles is then investigated with different driving scenarios taken into consideration. As clearly observed from the simulation results, the significance of this work in terms of obstacle avoidance is demonstrated. Furthermore, a noteworthy achievement of high computation efficiency is attained; and as a result, real-time computation and implementation can be realized through this framework, and thus it provides additional safety to the on-road driving tasks.