 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVelocity Obstacle Based Risk-Bounded Motion Planning for Stochastic Multi-Agent Systems
Paper and Code
Feb 20, 2022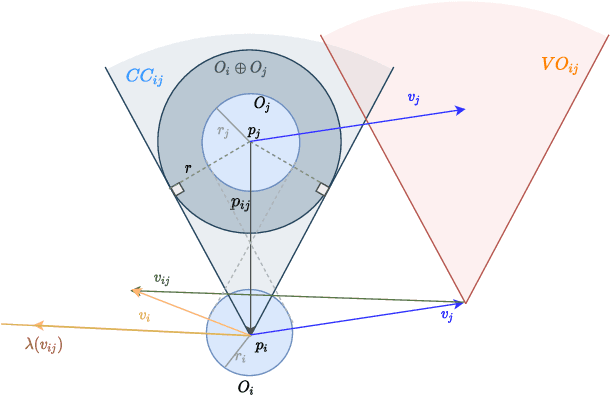
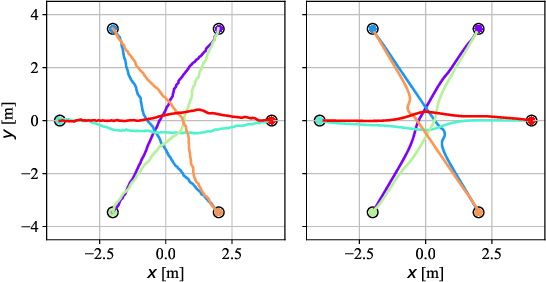
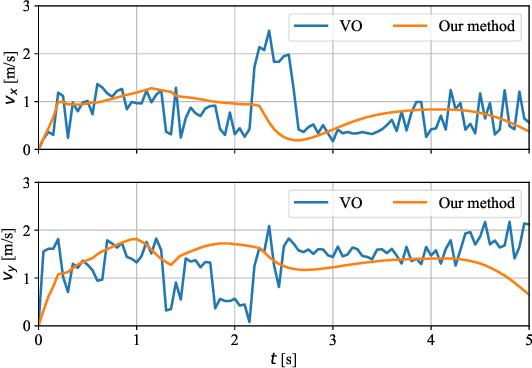
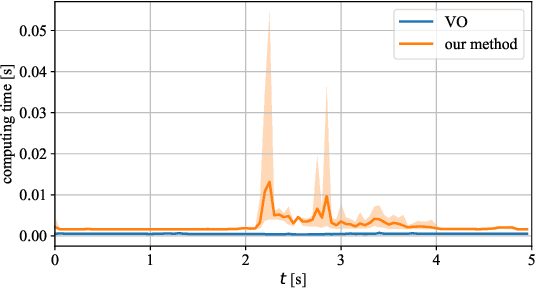
In this paper, we present an innovative risk-bounded motion planning methodology for stochastic multi-agent systems. For this methodology, the disturbance, noise, and model uncertainty are considered; and a velocity obstacle method is utilized to formulate the collision-avoidance constraints in the velocity space. With the exploitation of geometric information of static obstacles and velocity obstacles, a distributed optimization problem with probabilistic chance constraints is formulated for the stochastic multi-agent system. Consequently, collision-free trajectories are generated under a prescribed collision risk bound. Due to the existence of probabilistic and disjunctive constraints, the distributed chance-constrained optimization problem is reformulated as a mixed-integer program by introducing the binary variable to improve computational efficiency. This approach thus renders it possible to execute the motion planning task in the velocity space instead of the position space, which leads to smoother collision-free trajectories for multi-agent systems and higher computational efficiency. Moreover, the risk of potential collisions is bounded with this robust motion planning methodology. To validate the effectiveness of the methodology, different scenarios for multiple agents are investigated, and the simulation results clearly show that the proposed approach can generate high-quality trajectories under a predefined collision risk bound and avoid potential collisions effectively in the velocity space.