 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFD-VLA: Force-Distilled Vision-Language-Action Model for Contact-Rich Manipulation
Feb 02, 2026Force sensing is a crucial modality for Vision-Language-Action (VLA) frameworks, as it enables fine-grained perception and dexterous manipulation in contact-rich tasks. We present Force-Distilled VLA (FD-VLA), a novel framework that integrates force awareness into contact-rich manipulation without relying on physical force sensors. The core of our approach is a Force Distillation Module (FDM), which distills force by mapping a learnable query token, conditioned on visual observations and robot states, into a predicted force token aligned with the latent representation of actual force signals. During inference, this distilled force token is injected into the pretrained VLM, enabling force-aware reasoning while preserving the integrity of its vision-language semantics. This design provides two key benefits: first, it allows practical deployment across a wide range of robots that lack expensive or fragile force-torque sensors, thereby reducing hardware cost and complexity; second, the FDM introduces an additional force-vision-state fusion prior to the VLM, which improves cross-modal alignment and enhances perception-action robustness in contact-rich scenarios. Surprisingly, our physical experiments show that the distilled force token outperforms direct sensor force measurements as well as other baselines, which highlights the effectiveness of this force-distilled VLA approach.
Opinion: Towards Unified Expressive Policy Optimization for Robust Robot Learning
Nov 13, 2025

Offline-to-online reinforcement learning (O2O-RL) has emerged as a promising paradigm for safe and efficient robotic policy deployment but suffers from two fundamental challenges: limited coverage of multimodal behaviors and distributional shifts during online adaptation. We propose UEPO, a unified generative framework inspired by large language model pretraining and fine-tuning strategies. Our contributions are threefold: (1) a multi-seed dynamics-aware diffusion policy that efficiently captures diverse modalities without training multiple models; (2) a dynamic divergence regularization mechanism that enforces physically meaningful policy diversity; and (3) a diffusion-based data augmentation module that enhances dynamics model generalization. On the D4RL benchmark, UEPO achieves +5.9\% absolute improvement over Uni-O4 on locomotion tasks and +12.4\% on dexterous manipulation, demonstrating strong generalization and scalability.
Semantic-LiDAR-Inertial-Wheel Odometry Fusion for Robust Localization in Large-Scale Dynamic Environments
Sep 18, 2025Reliable, drift-free global localization presents significant challenges yet remains crucial for autonomous navigation in large-scale dynamic environments. In this paper, we introduce a tightly-coupled Semantic-LiDAR-Inertial-Wheel Odometry fusion framework, which is specifically designed to provide high-precision state estimation and robust localization in large-scale dynamic environments. Our framework leverages an efficient semantic-voxel map representation and employs an improved scan matching algorithm, which utilizes global semantic information to significantly reduce long-term trajectory drift. Furthermore, it seamlessly fuses data from LiDAR, IMU, and wheel odometry using a tightly-coupled multi-sensor fusion Iterative Error-State Kalman Filter (iESKF). This ensures reliable localization without experiencing abnormal drift. Moreover, to tackle the challenges posed by terrain variations and dynamic movements, we introduce a 3D adaptive scaling strategy that allows for flexible adjustments to wheel odometry measurement weights, thereby enhancing localization precision. This study presents extensive real-world experiments conducted in a one-million-square-meter automated port, encompassing 3,575 hours of operational data from 35 Intelligent Guided Vehicles (IGVs). The results consistently demonstrate that our system outperforms state-of-the-art LiDAR-based localization methods in large-scale dynamic environments, highlighting the framework's reliability and practical value.
DuLoc: Life-Long Dual-Layer Localization in Changing and Dynamic Expansive Scenarios
Jul 31, 2025LiDAR-based localization serves as a critical component in autonomous systems, yet existing approaches face persistent challenges in balancing repeatability, accuracy, and environmental adaptability. Traditional point cloud registration methods relying solely on offline maps often exhibit limited robustness against long-term environmental changes, leading to localization drift and reliability degradation in dynamic real-world scenarios. To address these challenges, this paper proposes DuLoc, a robust and accurate localization method that tightly couples LiDAR-inertial odometry with offline map-based localization, incorporating a constant-velocity motion model to mitigate outlier noise in real-world scenarios. Specifically, we develop a LiDAR-based localization framework that seamlessly integrates a prior global map with dynamic real-time local maps, enabling robust localization in unbounded and changing environments. Extensive real-world experiments in ultra unbounded port that involve 2,856 hours of operational data across 32 Intelligent Guided Vehicles (IGVs) are conducted and reported in this study. The results attained demonstrate that our system outperforms other state-of-the-art LiDAR localization systems in large-scale changing outdoor environments.
Robotic Control Optimization Through Kernel Selection in Safe Bayesian Optimization
Nov 12, 2024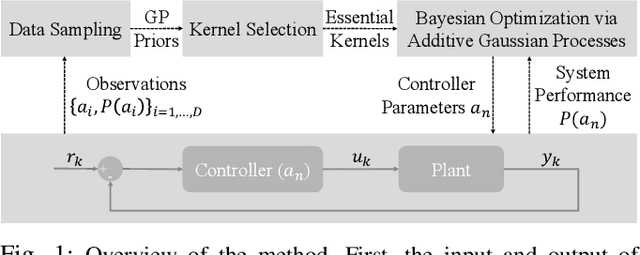
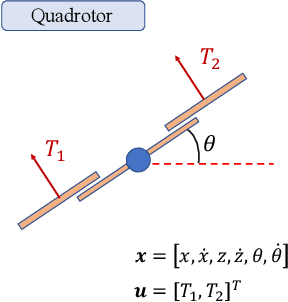
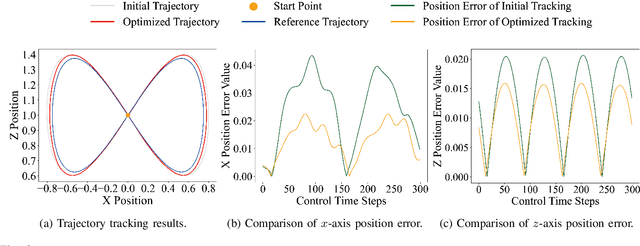
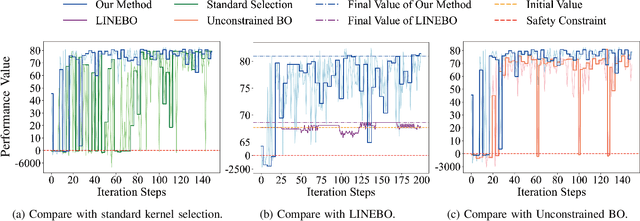
Control system optimization has long been a fundamental challenge in robotics. While recent advancements have led to the development of control algorithms that leverage learning-based approaches, such as SafeOpt, to optimize single feedback controllers, scaling these methods to high-dimensional complex systems with multiple controllers remains an open problem. In this paper, we propose a novel learning-based control optimization method, which enhances the additive Gaussian process-based Safe Bayesian Optimization algorithm to efficiently tackle high-dimensional problems through kernel selection. We use PID controller optimization in drones as a representative example and test the method on Safe Control Gym, a benchmark designed for evaluating safe control techniques. We show that the proposed method provides a more efficient and optimal solution for high-dimensional control optimization problems, demonstrating significant improvements over existing techniques.
Safe Bayesian Optimization for High-Dimensional Control Systems via Additive Gaussian Processes
Aug 29, 2024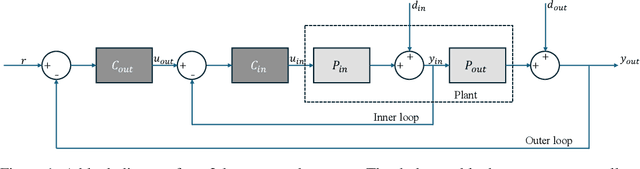
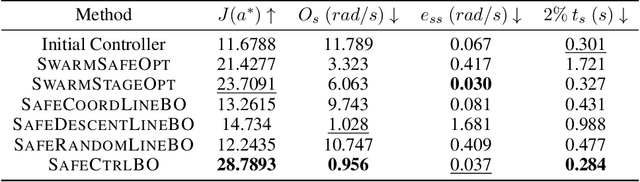
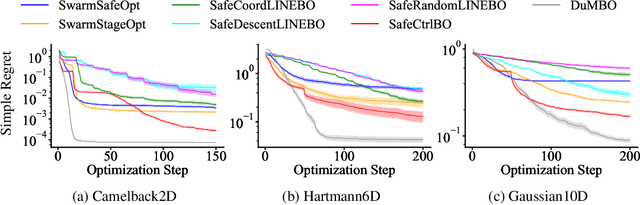
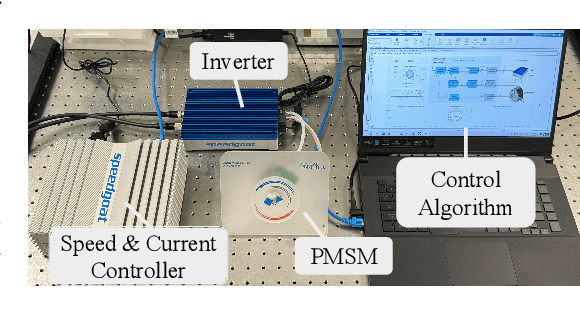
Controller tuning and optimization have been among the most fundamental problems in robotics and mechatronic systems. The traditional methodology is usually model-based, but its performance heavily relies on an accurate mathematical model of the system. In control applications with complex dynamics, obtaining a precise model is often challenging, leading us towards a data-driven approach. While optimizing a single controller has been explored by various researchers, it remains a challenge to obtain the optimal controller parameters safely and efficiently when multiple controllers are involved. In this paper, we propose a high-dimensional safe Bayesian optimization method based on additive Gaussian processes to optimize multiple controllers simultaneously and safely. Additive Gaussian kernels replace the traditional squared-exponential kernels or Mat\'ern kernels, enhancing the efficiency with which Gaussian processes update information on unknown functions. Experimental results on a permanent magnet synchronous motor (PMSM) demonstrate that compared to existing safe Bayesian optimization algorithms, our method can obtain optimal parameters more efficiently while ensuring safety.
Generalized Iterative Super-Twisting Sliding Mode Control: A Case Study on Flexure-Joint Dual-Drive H-Gantry Stage
Mar 23, 2021
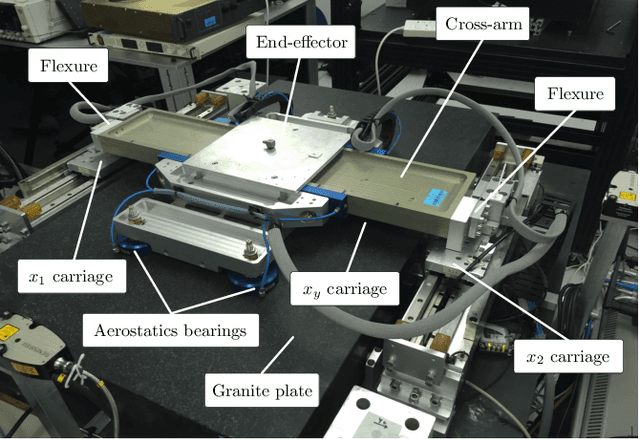

Mechatronic systems are commonly used in the industry, where fast and accurate motion performance is always required to guarantee manufacturing precision and efficiency. Nevertheless, the system model and parameters are difficult to be obtained accurately. Moreover, the high-order modes, strong coupling in the multi-axis systems, or unmodeled frictions will bring uncertain dynamics to the system. To overcome the above-mentioned issues and enhance the motion performance, this paper introduces a novel intelligent and totally model-free control method for mechatronic systems with unknown dynamics. In detail, a 2-degree-of-freedom (DOF) architecture is designed, which organically merges a generalized super-twisting algorithm with a unique iterative learning law. The controller solely utilizes the input-output data collected in iterations such that it works without any knowledge of the system parameters. The rigorous proof of convergence ability is given and a case study on flexture-joint dual-drive H-gantry stage is shown to validate the effectiveness of the proposed method.
Grasping Detection Network with Uncertainty Estimation for Confidence-Driven Semi-Supervised Domain Adaptation
Aug 20, 2020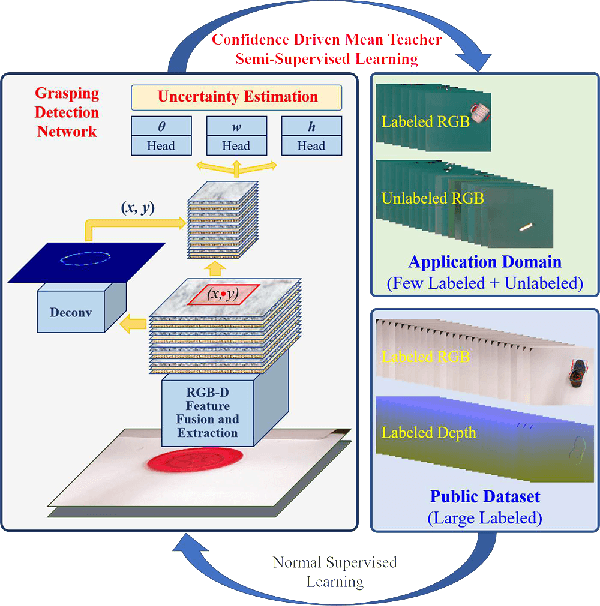
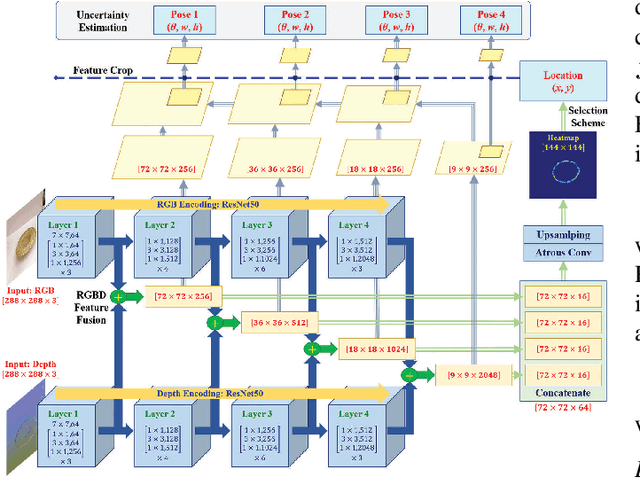
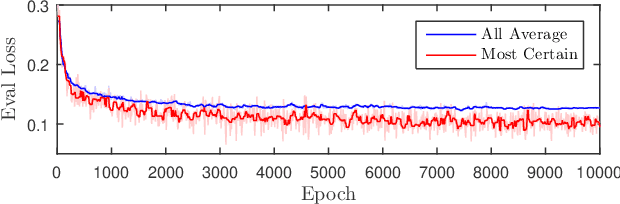

Data-efficient domain adaptation with only a few labelled data is desired for many robotic applications, e.g., in grasping detection, the inference skill learned from a grasping dataset is not universal enough to directly apply on various other daily/industrial applications. This paper presents an approach enabling the easy domain adaptation through a novel grasping detection network with confidence-driven semi-supervised learning, where these two components deeply interact with each other. The proposed grasping detection network specially provides a prediction uncertainty estimation mechanism by leveraging on Feature Pyramid Network (FPN), and the mean-teacher semi-supervised learning utilizes such uncertainty information to emphasizing the consistency loss only for those unlabelled data with high confidence, which we referred it as the confidence-driven mean teacher. This approach largely prevents the student model to learn the incorrect/harmful information from the consistency loss, which speeds up the learning progress and improves the model accuracy. Our results show that the proposed network can achieve high success rate on the Cornell grasping dataset, and for domain adaptation with very limited data, the confidence-driven mean teacher outperforms the original mean teacher and direct training by more than 10% in evaluation loss especially for avoiding the overfitting and model diverging.
Data-Driven Multi-Objective Controller Optimization for a Magnetically-Levitated Nanopositioning System
Jul 06, 2020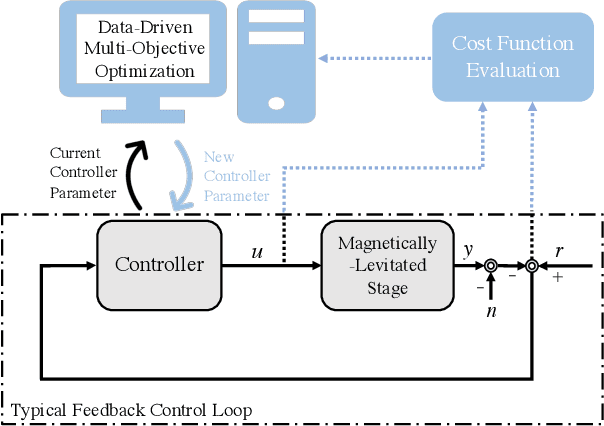

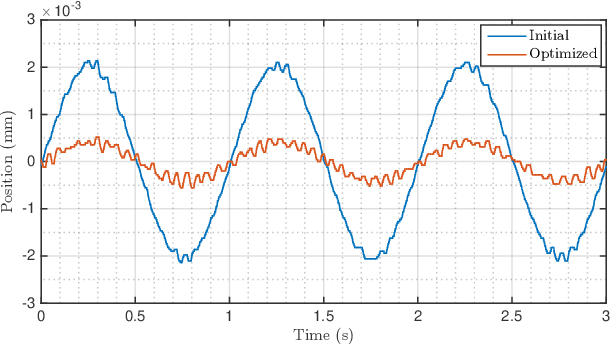
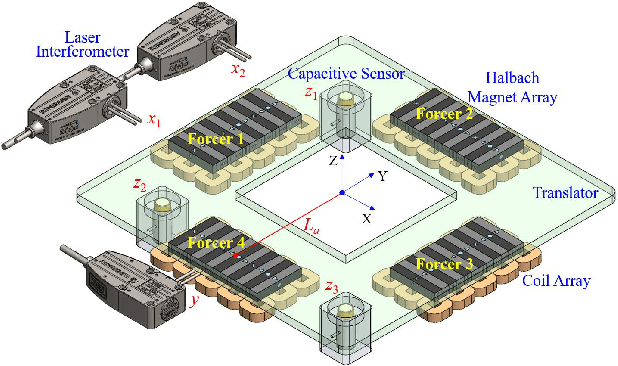
The performance achieved with traditional model-based control system design approaches typically relies heavily upon accurate modeling of the motion dynamics. However, modeling the true dynamics of present-day increasingly complex systems can be an extremely challenging task; and the usually necessary practical approximations often render the automation system to operate in a non-optimal condition. This problem can be greatly aggravated in the case of a multi-axis magnetically-levitated nanopositioning system where the fully floating behavior and multi-axis coupling make extremely accurate identification of the motion dynamics largely impossible. On the other hand, in many related industrial automation applications, e.g., the scanning process with the maglev system, repetitive motions are involved which could generate a large amount of motion data under non-optimal conditions. These motion data essentially contain rich information; therefore, the possibility exists to develop an intelligent automation system to learn from these motion data and to drive the system to operate towards optimality in a data-driven manner. Along this line then, this paper proposes a data-driven controller optimization approach that learns from the past non-optimal motion data to iteratively improve the motion control performance. Specifically, a novel data-driven multi-objective optimization approach is proposed that is able to automatically estimate the gradient and Hessian purely based on the measured motion data; the multi-objective cost function is suitably designed to take into account both smooth and accurate trajectory tracking. Experiments are then conducted on the maglev nanopositioning system to demonstrate the effectiveness of the proposed method, and the results show rather clearly the practical appeal of our methodology for related complex robotic systems with no accurate model available.