 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Generalized and Incremental Few-Shot Object Detection
Sep 23, 2021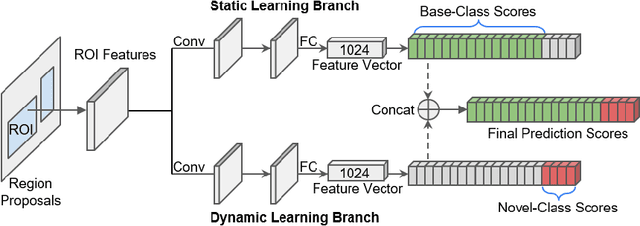
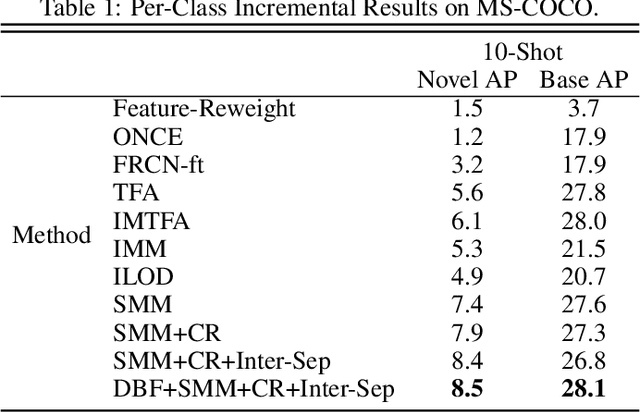
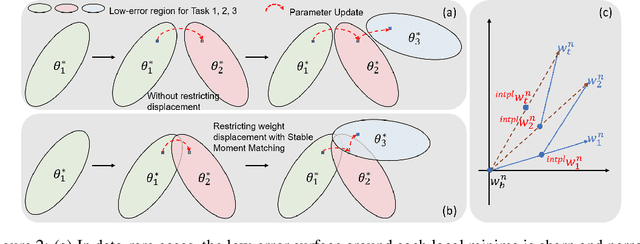
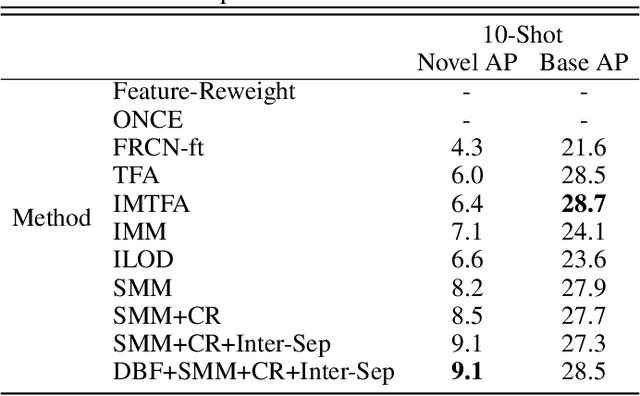
Real-world object detection is highly desired to be equipped with the learning expandability that can enlarge its detection classes incrementally. Moreover, such learning from only few annotated training samples further adds the flexibility for the object detector, which is highly expected in many applications such as autonomous driving, robotics, etc. However, such sequential learning scenario with few-shot training samples generally causes catastrophic forgetting and dramatic overfitting. In this paper, to address the above incremental few-shot learning issues, a novel Incremental Few-Shot Object Detection (iFSOD) method is proposed to enable the effective continual learning from few-shot samples. Specifically, a Double-Branch Framework (DBF) is proposed to decouple the feature representation of base and novel (few-shot) class, which facilitates both the old-knowledge retention and new-class adaption simultaneously. Furthermore, a progressive model updating rule is carried out to preserve the long-term memory on old classes effectively when adapt to sequential new classes. Moreover, an inter-task class separation loss is proposed to extend the decision region of new-coming classes for better feature discrimination. We conduct experiments on both Pascal VOC and MS-COCO, which demonstrate that our method can effectively solve the problem of incremental few-shot detection and significantly improve the detection accuracy on both base and novel classes.
Grasping Detection Network with Uncertainty Estimation for Confidence-Driven Semi-Supervised Domain Adaptation
Aug 20, 2020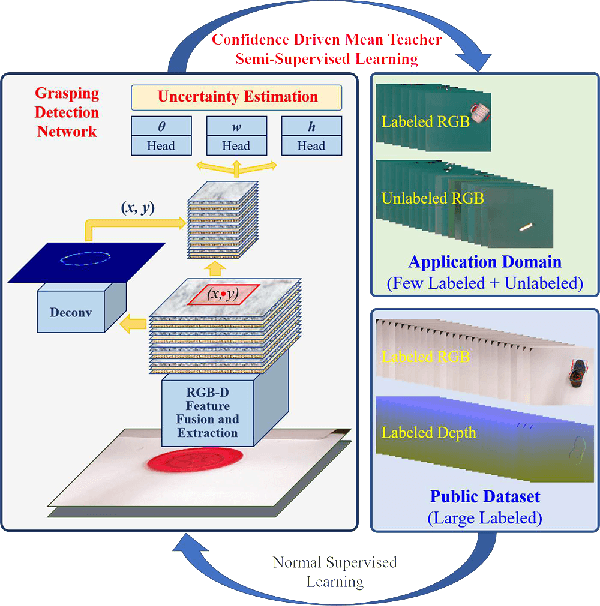
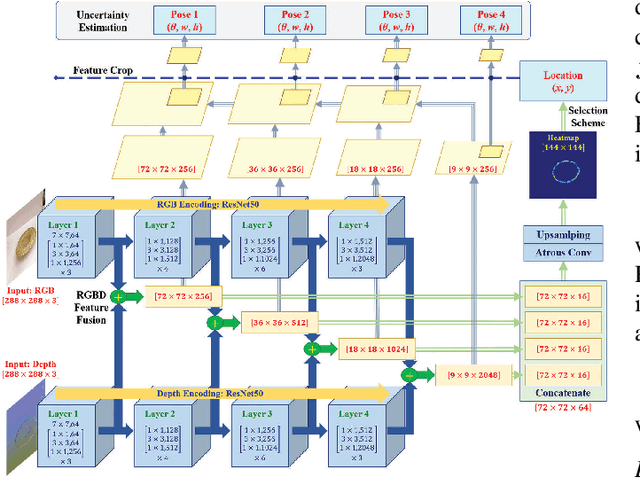
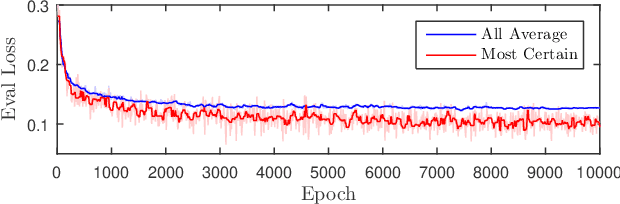

Data-efficient domain adaptation with only a few labelled data is desired for many robotic applications, e.g., in grasping detection, the inference skill learned from a grasping dataset is not universal enough to directly apply on various other daily/industrial applications. This paper presents an approach enabling the easy domain adaptation through a novel grasping detection network with confidence-driven semi-supervised learning, where these two components deeply interact with each other. The proposed grasping detection network specially provides a prediction uncertainty estimation mechanism by leveraging on Feature Pyramid Network (FPN), and the mean-teacher semi-supervised learning utilizes such uncertainty information to emphasizing the consistency loss only for those unlabelled data with high confidence, which we referred it as the confidence-driven mean teacher. This approach largely prevents the student model to learn the incorrect/harmful information from the consistency loss, which speeds up the learning progress and improves the model accuracy. Our results show that the proposed network can achieve high success rate on the Cornell grasping dataset, and for domain adaptation with very limited data, the confidence-driven mean teacher outperforms the original mean teacher and direct training by more than 10% in evaluation loss especially for avoiding the overfitting and model diverging.
Data-Driven Multi-Objective Controller Optimization for a Magnetically-Levitated Nanopositioning System
Jul 06, 2020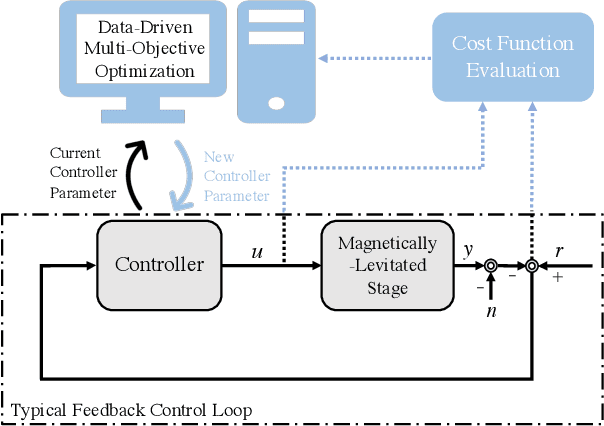

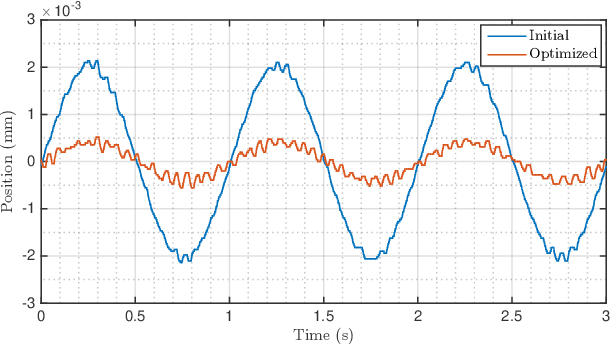
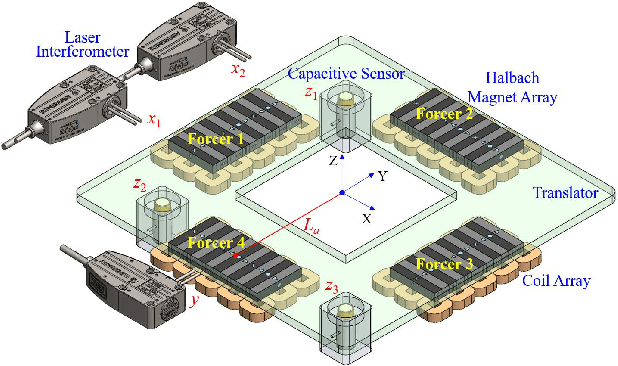
The performance achieved with traditional model-based control system design approaches typically relies heavily upon accurate modeling of the motion dynamics. However, modeling the true dynamics of present-day increasingly complex systems can be an extremely challenging task; and the usually necessary practical approximations often render the automation system to operate in a non-optimal condition. This problem can be greatly aggravated in the case of a multi-axis magnetically-levitated nanopositioning system where the fully floating behavior and multi-axis coupling make extremely accurate identification of the motion dynamics largely impossible. On the other hand, in many related industrial automation applications, e.g., the scanning process with the maglev system, repetitive motions are involved which could generate a large amount of motion data under non-optimal conditions. These motion data essentially contain rich information; therefore, the possibility exists to develop an intelligent automation system to learn from these motion data and to drive the system to operate towards optimality in a data-driven manner. Along this line then, this paper proposes a data-driven controller optimization approach that learns from the past non-optimal motion data to iteratively improve the motion control performance. Specifically, a novel data-driven multi-objective optimization approach is proposed that is able to automatically estimate the gradient and Hessian purely based on the measured motion data; the multi-objective cost function is suitably designed to take into account both smooth and accurate trajectory tracking. Experiments are then conducted on the maglev nanopositioning system to demonstrate the effectiveness of the proposed method, and the results show rather clearly the practical appeal of our methodology for related complex robotic systems with no accurate model available.