 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEvolving from Tool User to Creator via Training-Free Experience Reuse in Multimodal Reasoning
Feb 02, 2026Existing Tool-Integrated Reasoning (TIR) models have effectively extended the question-answering capabilities of LLMs by incorporating external tools. However, real-world scenarios present numerous open-ended problems where fixed tools often fail to meet task requirements. Furthermore, the lack of self-optimization mechanisms means that erroneous tool outputs can mislead the LLM's responses. Additionally, the construction of existing tools entails significant manual effort, which consequently constrains their applicability. Recognizing that the reasoning traces of LLMs encapsulate implicit problem-solving capabilities, we propose UCT, a novel training-free framework that transforms agents from tool users to tool creators. This approach harvests reasoning experiences and distills them into reusable assets. This method transforms the agent from a mere tool user into a tool creator, enabling adaptive tool creation and self-updating during the inference process. We also introduce a memory consolidation mechanism to maintain the tool library, ensuring high reusability of retained experiential memory for subsequent reasoning tasks. This novel automated tool construction paradigm continuously improves tool quality during reasoning, allowing the overall agent system to progress without additional training. Extensive experiments demonstrate that our method serves as a novel paradigm for enhancing the capabilities of TIR models. In particular, the significant performance gains achieved +20.86%$\uparrow$ and +23.04%$\uparrow$ on benchmarks across multi-domain mathematical and scientific reasoning tasks validate the self-evolving capability of the agent.
MindWatcher: Toward Smarter Multimodal Tool-Integrated Reasoning
Dec 29, 2025Traditional workflow-based agents exhibit limited intelligence when addressing real-world problems requiring tool invocation. Tool-integrated reasoning (TIR) agents capable of autonomous reasoning and tool invocation are rapidly emerging as a powerful approach for complex decision-making tasks involving multi-step interactions with external environments. In this work, we introduce MindWatcher, a TIR agent integrating interleaved thinking and multimodal chain-of-thought (CoT) reasoning. MindWatcher can autonomously decide whether and how to invoke diverse tools and coordinate their use, without relying on human prompts or workflows. The interleaved thinking paradigm enables the model to switch between thinking and tool calling at any intermediate stage, while its multimodal CoT capability allows manipulation of images during reasoning to yield more precise search results. We implement automated data auditing and evaluation pipelines, complemented by manually curated high-quality datasets for training, and we construct a benchmark, called MindWatcher-Evaluate Bench (MWE-Bench), to evaluate its performance. MindWatcher is equipped with a comprehensive suite of auxiliary reasoning tools, enabling it to address broad-domain multimodal problems. A large-scale, high-quality local image retrieval database, covering eight categories including cars, animals, and plants, endows model with robust object recognition despite its small size. Finally, we design a more efficient training infrastructure for MindWatcher, enhancing training speed and hardware utilization. Experiments not only demonstrate that MindWatcher matches or exceeds the performance of larger or more recent models through superior tool invocation, but also uncover critical insights for agent training, such as the genetic inheritance phenomenon in agentic RL.
MARS2 2025 Challenge on Multimodal Reasoning: Datasets, Methods, Results, Discussion, and Outlook
Sep 17, 2025
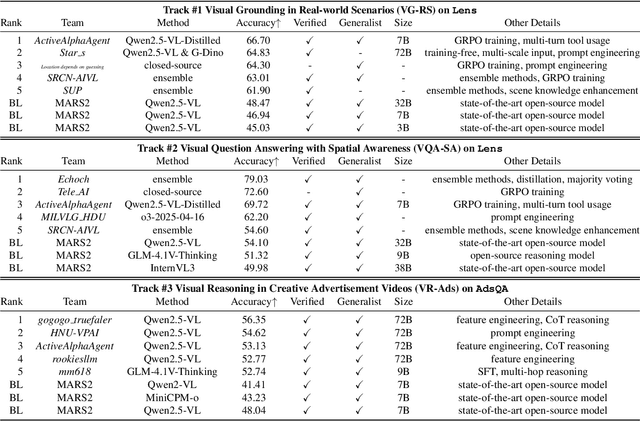

This paper reviews the MARS2 2025 Challenge on Multimodal Reasoning. We aim to bring together different approaches in multimodal machine learning and LLMs via a large benchmark. We hope it better allows researchers to follow the state-of-the-art in this very dynamic area. Meanwhile, a growing number of testbeds have boosted the evolution of general-purpose large language models. Thus, this year's MARS2 focuses on real-world and specialized scenarios to broaden the multimodal reasoning applications of MLLMs. Our organizing team released two tailored datasets Lens and AdsQA as test sets, which support general reasoning in 12 daily scenarios and domain-specific reasoning in advertisement videos, respectively. We evaluated 40+ baselines that include both generalist MLLMs and task-specific models, and opened up three competition tracks, i.e., Visual Grounding in Real-world Scenarios (VG-RS), Visual Question Answering with Spatial Awareness (VQA-SA), and Visual Reasoning in Creative Advertisement Videos (VR-Ads). Finally, 76 teams from the renowned academic and industrial institutions have registered and 40+ valid submissions (out of 1200+) have been included in our ranking lists. Our datasets, code sets (40+ baselines and 15+ participants' methods), and rankings are publicly available on the MARS2 workshop website and our GitHub organization page https://github.com/mars2workshop/, where our updates and announcements of upcoming events will be continuously provided.
COPO: Consistency-Aware Policy Optimization
Aug 06, 2025Reinforcement learning has significantly enhanced the reasoning capabilities of Large Language Models (LLMs) in complex problem-solving tasks. Recently, the introduction of DeepSeek R1 has inspired a surge of interest in leveraging rule-based rewards as a low-cost alternative for computing advantage functions and guiding policy optimization. However, a common challenge observed across many replication and extension efforts is that when multiple sampled responses under a single prompt converge to identical outcomes, whether correct or incorrect, the group-based advantage degenerates to zero. This leads to vanishing gradients and renders the corresponding samples ineffective for learning, ultimately limiting training efficiency and downstream performance. To address this issue, we propose a consistency-aware policy optimization framework that introduces a structured global reward based on outcome consistency, the global loss based on it ensures that, even when model outputs show high intra-group consistency, the training process still receives meaningful learning signals, which encourages the generation of correct and self-consistent reasoning paths from a global perspective. Furthermore, we incorporate an entropy-based soft blending mechanism that adaptively balances local advantage estimation with global optimization, enabling dynamic transitions between exploration and convergence throughout training. Our method introduces several key innovations in both reward design and optimization strategy. We validate its effectiveness through substantial performance gains on multiple mathematical reasoning benchmarks, highlighting the proposed framework's robustness and general applicability. Code of this work has been released at https://github.com/hijih/copo-code.git.
Robotic Control Optimization Through Kernel Selection in Safe Bayesian Optimization
Nov 12, 2024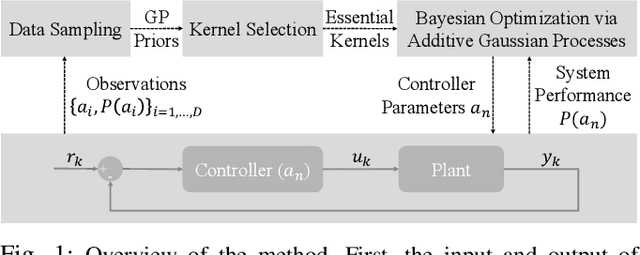
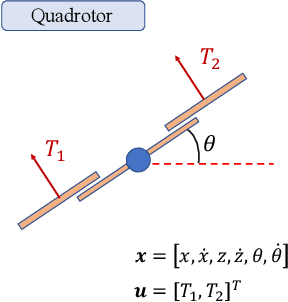
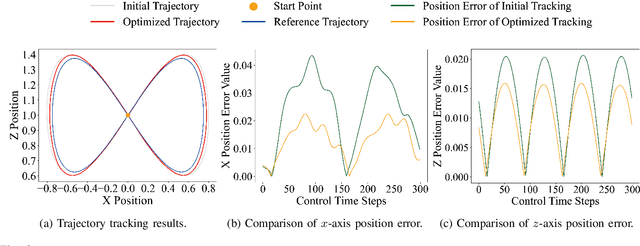
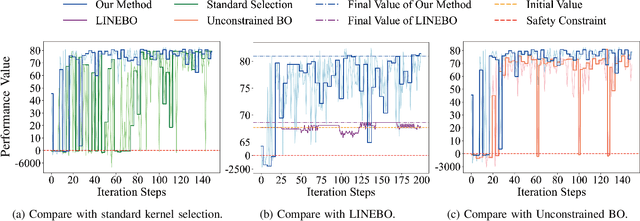
Control system optimization has long been a fundamental challenge in robotics. While recent advancements have led to the development of control algorithms that leverage learning-based approaches, such as SafeOpt, to optimize single feedback controllers, scaling these methods to high-dimensional complex systems with multiple controllers remains an open problem. In this paper, we propose a novel learning-based control optimization method, which enhances the additive Gaussian process-based Safe Bayesian Optimization algorithm to efficiently tackle high-dimensional problems through kernel selection. We use PID controller optimization in drones as a representative example and test the method on Safe Control Gym, a benchmark designed for evaluating safe control techniques. We show that the proposed method provides a more efficient and optimal solution for high-dimensional control optimization problems, demonstrating significant improvements over existing techniques.
Imp: Highly Capable Large Multimodal Models for Mobile Devices
May 20, 2024By harnessing the capabilities of large language models (LLMs), recent large multimodal models (LMMs) have shown remarkable versatility in open-world multimodal understanding. Nevertheless, they are usually parameter-heavy and computation-intensive, thus hindering their applicability in resource-constrained scenarios. To this end, several lightweight LMMs have been proposed successively to maximize the capabilities under constrained scale (e.g., 3B). Despite the encouraging results achieved by these methods, most of them only focus on one or two aspects of the design space, and the key design choices that influence model capability have not yet been thoroughly investigated. In this paper, we conduct a systematic study for lightweight LMMs from the aspects of model architecture, training strategy, and training data. Based on our findings, we obtain Imp -- a family of highly capable LMMs at the 2B-4B scales. Notably, our Imp-3B model steadily outperforms all the existing lightweight LMMs of similar size, and even surpasses the state-of-the-art LMMs at the 13B scale. With low-bit quantization and resolution reduction techniques, our Imp model can be deployed on a Qualcomm Snapdragon 8Gen3 mobile chip with a high inference speed of about 13 tokens/s.