 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobotic Control Optimization Through Kernel Selection in Safe Bayesian Optimization
Nov 12, 2024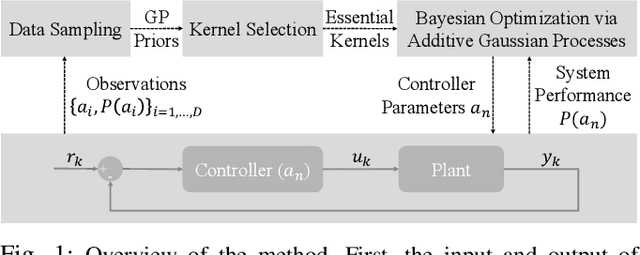
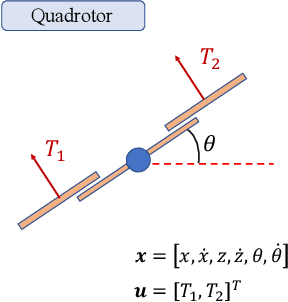
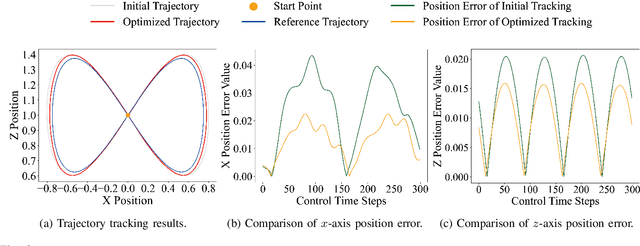
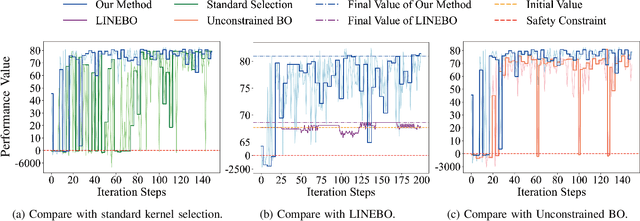
Control system optimization has long been a fundamental challenge in robotics. While recent advancements have led to the development of control algorithms that leverage learning-based approaches, such as SafeOpt, to optimize single feedback controllers, scaling these methods to high-dimensional complex systems with multiple controllers remains an open problem. In this paper, we propose a novel learning-based control optimization method, which enhances the additive Gaussian process-based Safe Bayesian Optimization algorithm to efficiently tackle high-dimensional problems through kernel selection. We use PID controller optimization in drones as a representative example and test the method on Safe Control Gym, a benchmark designed for evaluating safe control techniques. We show that the proposed method provides a more efficient and optimal solution for high-dimensional control optimization problems, demonstrating significant improvements over existing techniques.
Safe Bayesian Optimization for High-Dimensional Control Systems via Additive Gaussian Processes
Aug 29, 2024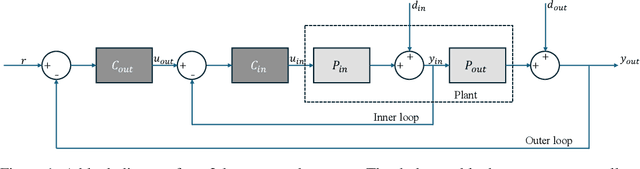
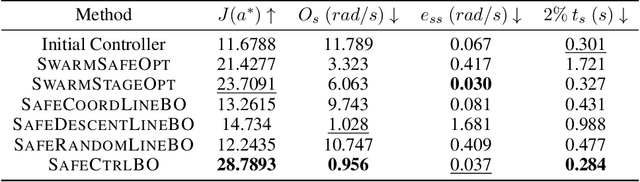
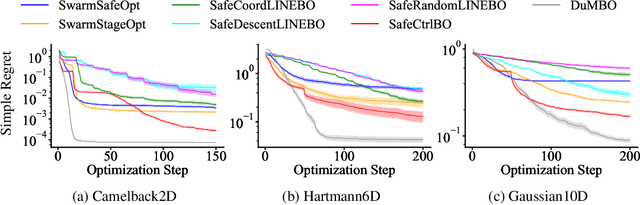
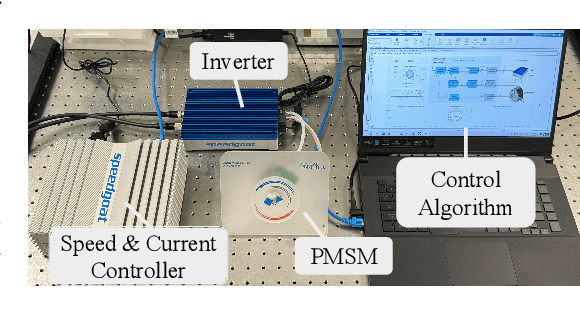
Controller tuning and optimization have been among the most fundamental problems in robotics and mechatronic systems. The traditional methodology is usually model-based, but its performance heavily relies on an accurate mathematical model of the system. In control applications with complex dynamics, obtaining a precise model is often challenging, leading us towards a data-driven approach. While optimizing a single controller has been explored by various researchers, it remains a challenge to obtain the optimal controller parameters safely and efficiently when multiple controllers are involved. In this paper, we propose a high-dimensional safe Bayesian optimization method based on additive Gaussian processes to optimize multiple controllers simultaneously and safely. Additive Gaussian kernels replace the traditional squared-exponential kernels or Mat\'ern kernels, enhancing the efficiency with which Gaussian processes update information on unknown functions. Experimental results on a permanent magnet synchronous motor (PMSM) demonstrate that compared to existing safe Bayesian optimization algorithms, our method can obtain optimal parameters more efficiently while ensuring safety.