 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeToMPC: Task-oriented Model Predictive Control via ADMM for Safe Robotic Manipulation
Mar 14, 2026This paper proposes a task-oriented model predictive control (ToMPC) framework for safe and efficient robotic manipulation in open workspaces. The framework unifies collision-free motion and robot-environment interaction to address diverse scenarios. Additionally, it introduces task-oriented obstacle avoidance that leverages kinematic redundancy to enhance manipulation efficiency in obstructed environments. This complex optimization problem is solved by the alternating direction method of multipliers (ADMM), which decomposes the problem into two subproblems tackled by differential dynamic programming (DDP) and quadratic programming (QP), respectively. The effectiveness of this approach is validated in simulation and hardware experiments on a Franka Panda robotic manipulator. Results demonstrate that the framework can plan motion and/or force trajectories in real time, maximize the manipulation range while avoiding obstacles, and strictly adhere to safety-related hard constraints.
Multi-Layered Safety of Redundant Robot Manipulators via Task-Oriented Planning and Control
Oct 23, 2024Ensuring safety is crucial to promote the application of robot manipulators in open workspace. Factors such as sensor errors or unpredictable collisions make the environment full of uncertainties. In this work, we investigate these potential safety challenges on redundant robot manipulators, and propose a task-oriented planning and control framework to achieve multi-layered safety while maintaining efficient task execution. Our approach consists of two main parts: a task-oriented trajectory planner based on multiple-shooting model predictive control method, and a torque controller that allows safe and efficient collision reaction using only proprioceptive data. Through extensive simulations and real-hardware experiments, we demonstrate that the proposed framework can effectively handle uncertain static or dynamic obstacles, and perform disturbance resistance in manipulation tasks when unforeseen contacts occur. All code will be open-sourced to benefit the community.
Learning robot inverse dynamics using sparse online Gaussian process with forgetting mechanism
Aug 06, 2022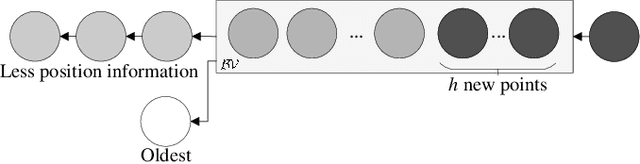
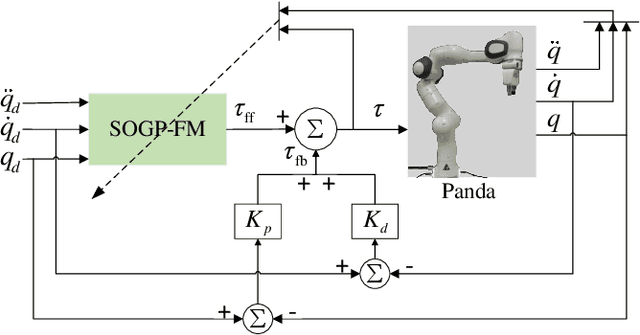
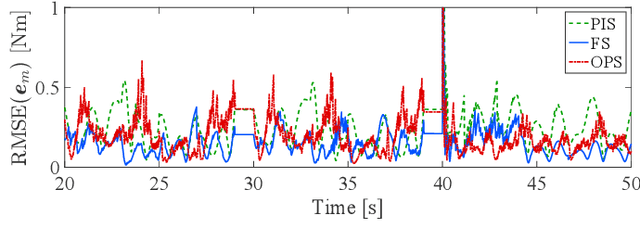
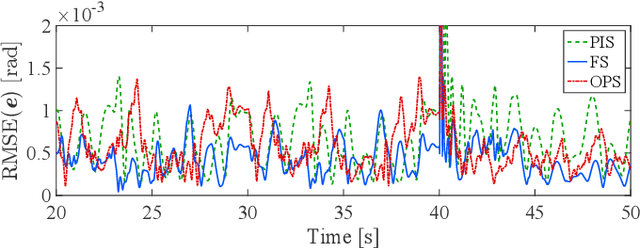
Online Gaussian processes (GPs), typically used for learning models from time-series data, are more flexible and robust than offline GPs. Both local and sparse approximations of GPs can efficiently learn complex models online. Yet, these approaches assume that all signals are relatively accurate and that all data are available for learning without misleading data. Besides, the online learning capacity of GPs is limited for high-dimension problems and long-term tasks in practice. This paper proposes a sparse online GP (SOGP) with a forgetting mechanism to forget distant model information at a specific rate. The proposed approach combines two general data deletion schemes for the basis vector set of SOGP: The position information-based scheme and the oldest points-based scheme. We apply our approach to learn the inverse dynamics of a collaborative robot with 7 degrees of freedom under a two-segment trajectory tracking problem with task switching. Both simulations and experiments have shown that the proposed approach achieves better tracking accuracy and predictive smoothness compared with the two general data deletion schemes.
Composite FORCE learning of chaotic echo state networks for time-series prediction
Jul 06, 2022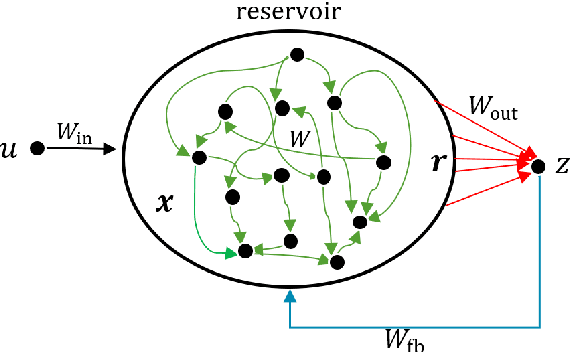
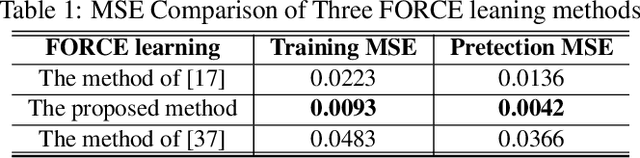

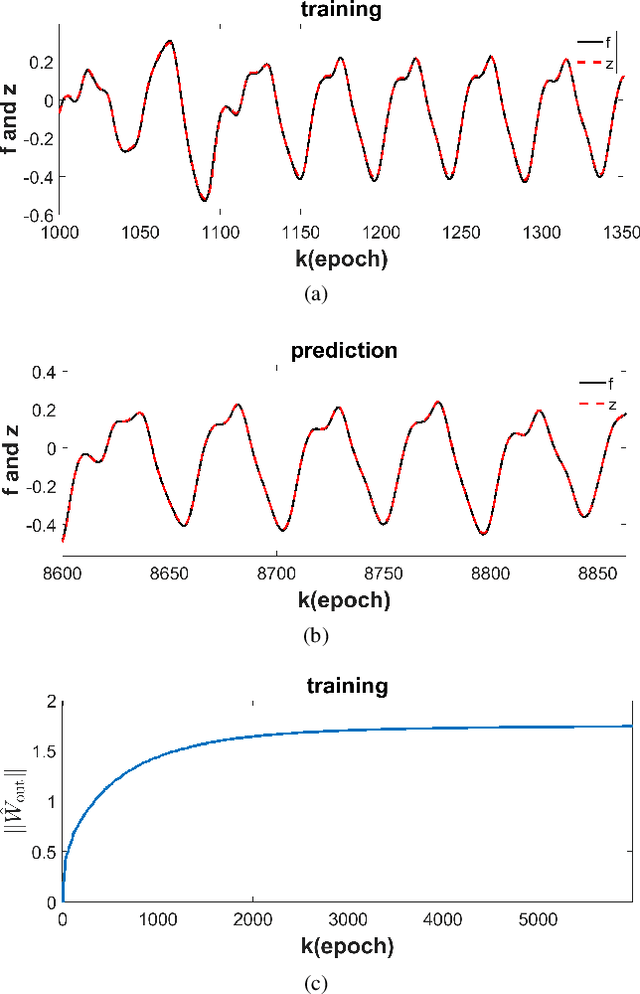
Echo state network (ESN), a kind of recurrent neural networks, consists of a fixed reservoir in which neurons are connected randomly and recursively and obtains the desired output only by training output connection weights. First-order reduced and controlled error (FORCE) learning is an online supervised training approach that can change the chaotic activity of ESNs into specified activity patterns. This paper proposes a composite FORCE learning method based on recursive least squares to train ESNs whose initial activity is spontaneously chaotic, where a composite learning technique featured by dynamic regressor extension and memory data exploitation is applied to enhance parameter convergence. The proposed method is applied to a benchmark problem about predicting chaotic time series generated by the Mackey-Glass system, and numerical results have shown that it significantly improves learning and prediction performances compared with existing methods.
Bioinspired composite learning control under discontinuous friction for industrial robots
Jun 24, 2022
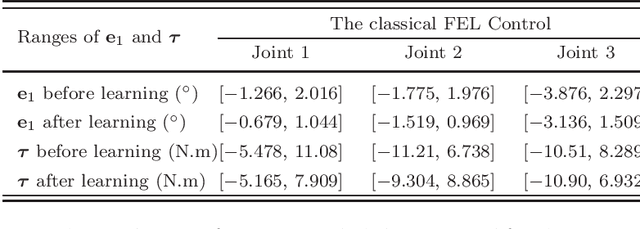
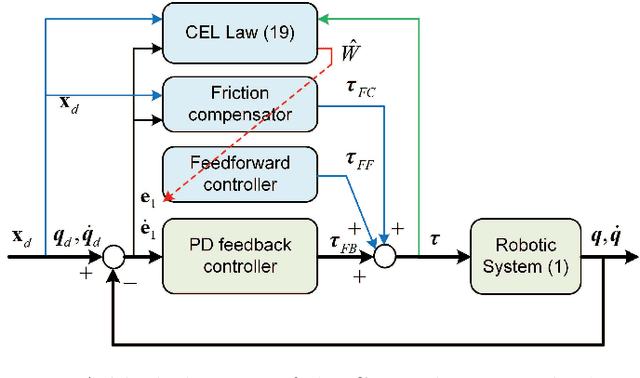
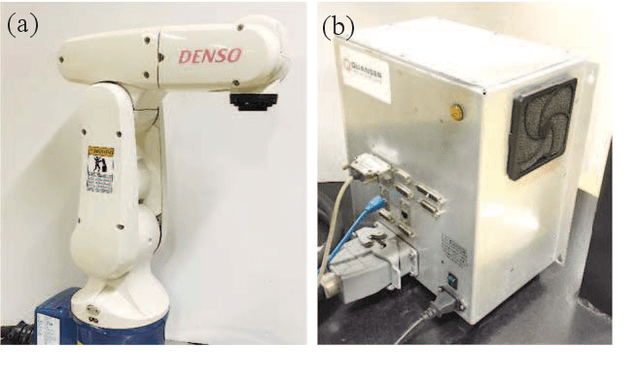
Adaptive control can be applied to robotic systems with parameter uncertainties, but improving its performance is usually difficult, especially under discontinuous friction. Inspired by the human motor learning control mechanism, an adaptive learning control approach is proposed for a broad class of robotic systems with discontinuous friction, where a composite error learning technique that exploits data memory is employed to enhance parameter estimation. Compared with the classical feedback error learning control, the proposed approach can achieve superior transient and steady-state tracking without high-gain feedback and persistent excitation at the cost of extra computational burden and memory usage. The performance improvement of the proposed approach has been verified by experiments based on a DENSO industrial robot.