 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLanguage and Sketching: An LLM-driven Interactive Multimodal Multitask Robot Navigation Framework
Nov 14, 2023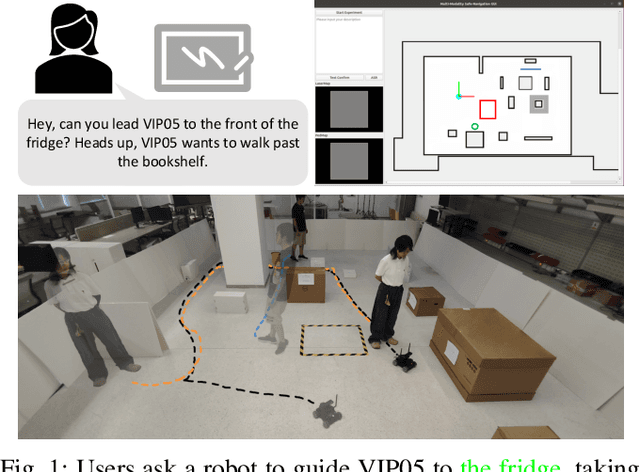
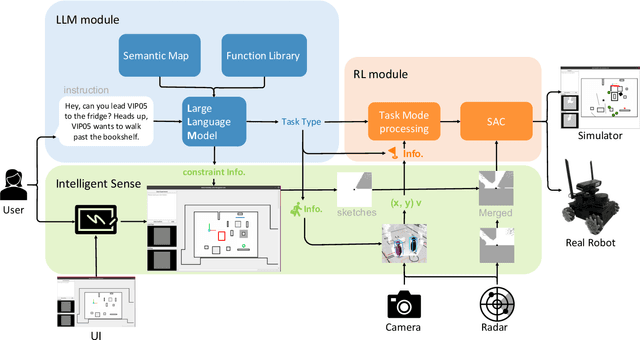
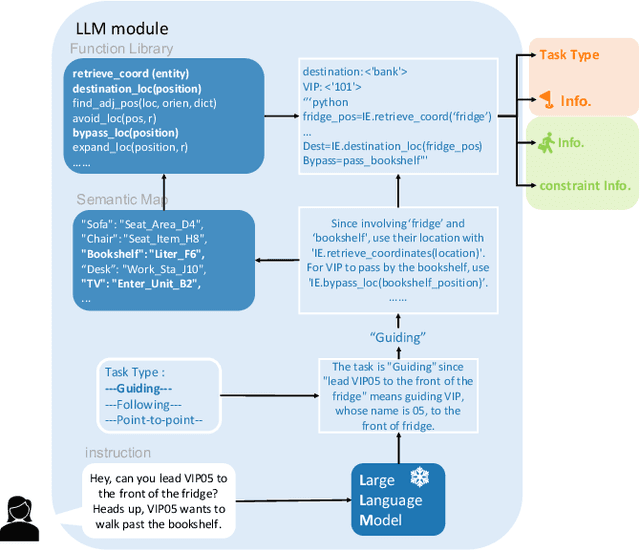
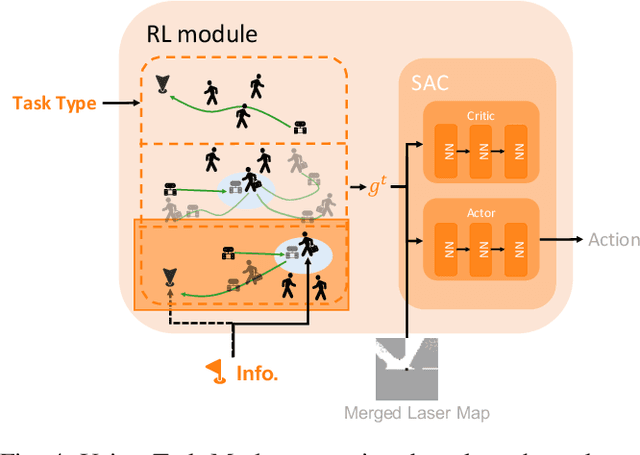
The socially-aware navigation system has evolved to adeptly avoid various obstacles while performing multiple tasks, such as point-to-point navigation, human-following, and -guiding. However, a prominent gap persists: in Human-Robot Interaction (HRI), the procedure of communicating commands to robots demands intricate mathematical formulations. Furthermore, the transition between tasks does not quite possess the intuitive control and user-centric interactivity that one would desire. In this work, we propose an LLM-driven interactive multimodal multitask robot navigation framework, termed LIM2N, to solve the above new challenge in the navigation field. We achieve this by first introducing a multimodal interaction framework where language and hand-drawn inputs can serve as navigation constraints and control objectives. Next, a reinforcement learning agent is built to handle multiple tasks with the received information. Crucially, LIM2N creates smooth cooperation among the reasoning of multimodal input, multitask planning, and adaptation and processing of the intelligent sensing modules in the complicated system. Extensive experiments are conducted in both simulation and the real world demonstrating that LIM2N has superior user needs understanding, alongside an enhanced interactive experience.
An Early Fault Detection Method of Rotating Machines Based on Multiple Feature Fusion with Stacking Architecture
May 01, 2022
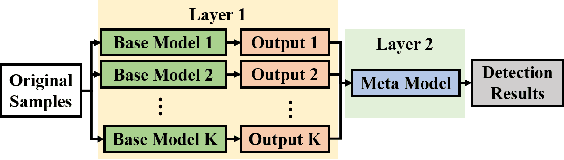
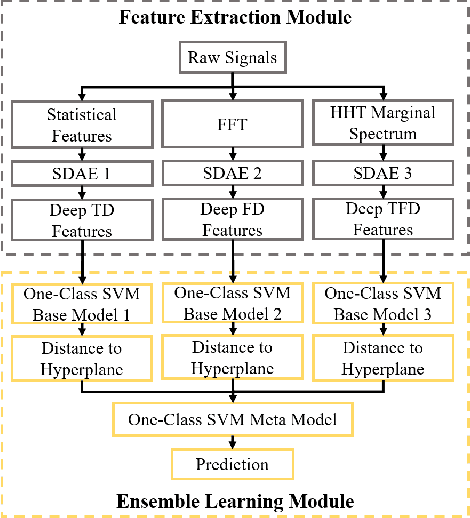

Early fault detection (EFD) of rotating machines is important to decrease the maintenance cost and improve the mechanical system stability. One of the key points of EFD is developing a generic model to extract robust and discriminative features from different equipment for early fault detection. Most existing EFD methods focus on learning fault representation by one type of feature. However, a combination of multiple features can capture a more comprehensive representation of system state. In this paper, we propose an EFD method based on multiple feature fusion with stacking architecture (M2FSA). The proposed method can extract generic and discriminiative features to detect early faults by combining time domain (TD), frequency domain (FD), and time-frequency domain (TFD) features. In order to unify the dimensions of the different domain features, Stacked Denoising Autoencoder (SDAE) is utilized to learn deep features in three domains. The architecture of the proposed M2FSA consists of two layers. The first layer contains three base models, whose corresponding inputs are different deep features. The outputs of the first layer are concatenated to generate the input to the second layer, which consists of a meta model. The proposed method is tested on three bearing datasets. The results demonstrate that the proposed method is better than existing methods both in sensibility and reliability.
Meta-Learning Based Early Fault Detection for Rolling Bearings via Few-Shot Anomaly Detection
Apr 27, 2022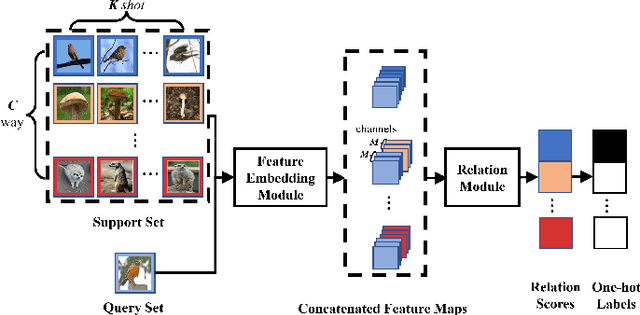

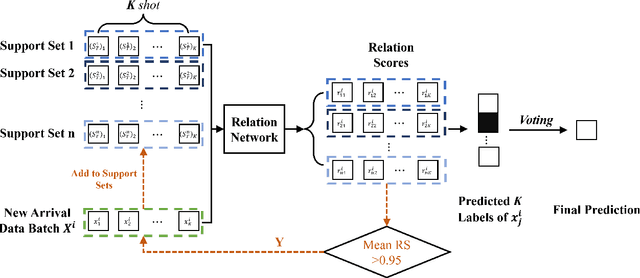
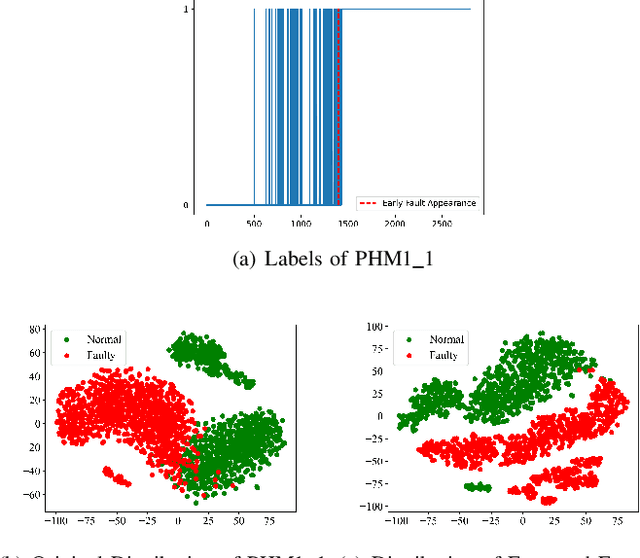
Early fault detection (EFD) of rolling bearings can recognize slight deviation of the health states and contribute to the stability of mechanical systems. In practice, very limited target bearing data are available to conduct EFD, which makes it hard to adapt to the EFD task of new bearings. To address this problem, many transfer learning based EFD methods utilize historical data to learn transferable domain knowledge and conduct early fault detection on new target bearings. However, most existing methods only consider the distribution drift across different working conditions but ignore the difference between bearings under the same working condition, which is called Unit-to-Unit Variability (UtUV). The setting of EFD with limited target data considering UtUV can be formulated as a Few-shot Anomaly Detection task. Therefore, this paper proposes a novel EFD method based on meta-learning considering UtUV. The proposed method can learn a generic metric based on Relation Network (RN) to measure the similarity between normal data and the new arrival target bearing data. Besides, the proposed method utilizes a health state embedding strategy to decrease false alarms. The performance of proposed method is tested on two bearing datasets. The results show that the proposed method can detect incipient faults earlier than the baselines with lower false alarms.
M2N: Mesh Movement Networks for PDE Solvers
Apr 24, 2022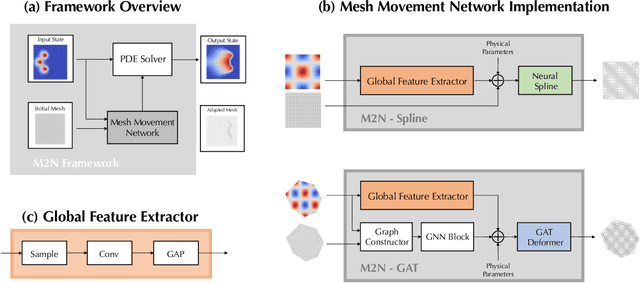
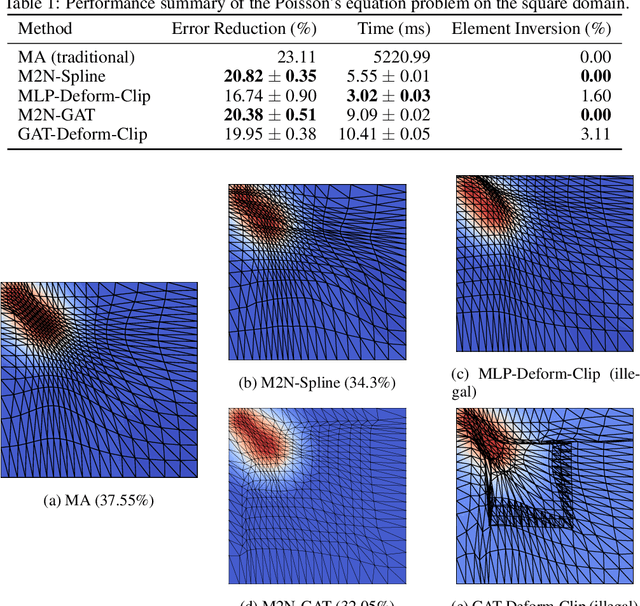
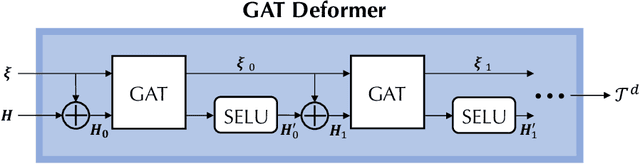
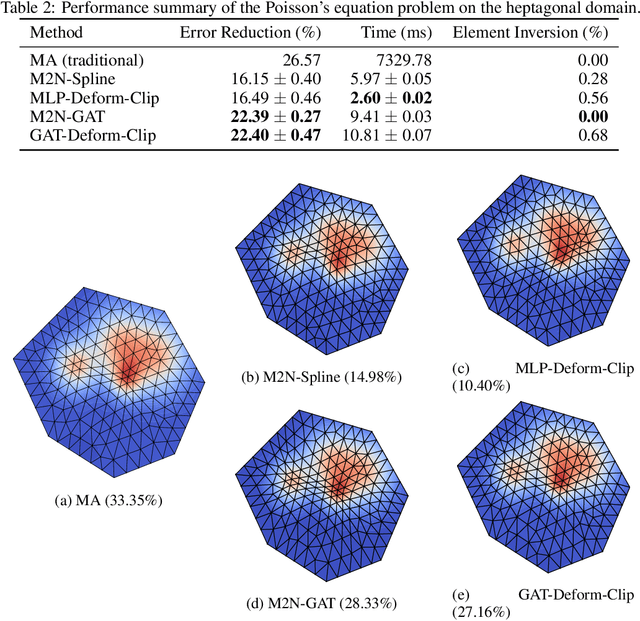
Mainstream numerical Partial Differential Equation (PDE) solvers require discretizing the physical domain using a mesh. Mesh movement methods aim to improve the accuracy of the numerical solution by increasing mesh resolution where the solution is not well-resolved, whilst reducing unnecessary resolution elsewhere. However, mesh movement methods, such as the Monge-Ampere method, require the solution of auxiliary equations, which can be extremely expensive especially when the mesh is adapted frequently. In this paper, we propose to our best knowledge the first learning-based end-to-end mesh movement framework for PDE solvers. Key requirements of learning-based mesh movement methods are alleviating mesh tangling, boundary consistency, and generalization to mesh with different resolutions. To achieve these goals, we introduce the neural spline model and the graph attention network (GAT) into our models respectively. While the Neural-Spline based model provides more flexibility for large deformation, the GAT based model can handle domains with more complicated shapes and is better at performing delicate local deformation. We validate our methods on stationary and time-dependent, linear and non-linear equations, as well as regularly and irregularly shaped domains. Compared to the traditional Monge-Ampere method, our approach can greatly accelerate the mesh adaptation process, whilst achieving comparable numerical error reduction.
Multi-Agent Reinforcement Learning for Active Voltage Control on Power Distribution Networks
Nov 05, 2021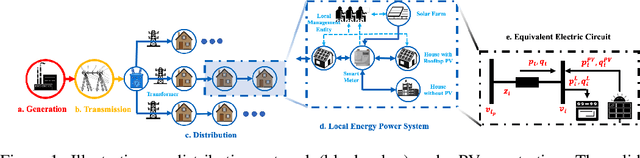

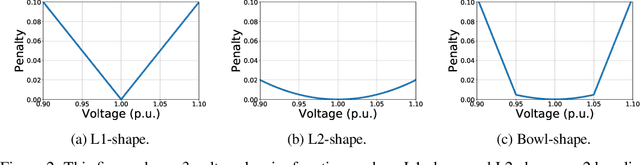

This paper presents a problem in power networks that creates an exciting and yet challenging real-world scenario for application of multi-agent reinforcement learning (MARL). The emerging trend of decarbonisation is placing excessive stress on power distribution networks. Active voltage control is seen as a promising solution to relieve power congestion and improve voltage quality without extra hardware investment, taking advantage of the controllable apparatuses in the network, such as roof-top photovoltaics (PVs) and static var compensators (SVCs). These controllable apparatuses appear in a vast number and are distributed in a wide geographic area, making MARL a natural candidate. This paper formulates the active voltage control problem in the framework of Dec-POMDP and establishes an open-source environment. It aims to bridge the gap between the power community and the MARL community and be a drive force towards real-world applications of MARL algorithms. Finally, we analyse the special characteristics of the active voltage control problems that cause challenges for state-of-the-art MARL approaches, and summarise the potential directions.
Learning to Shape Rewards using a Game of Switching Controls
Mar 16, 2021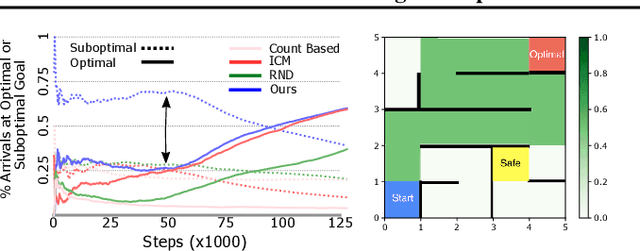
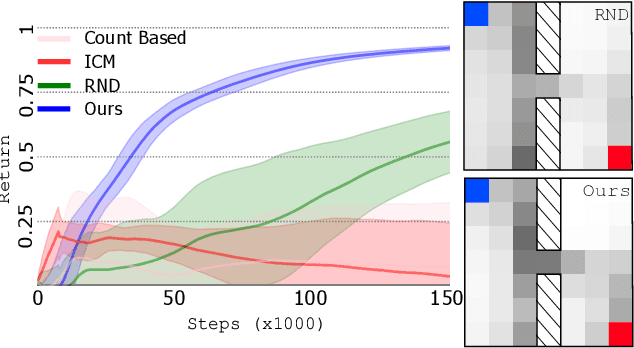
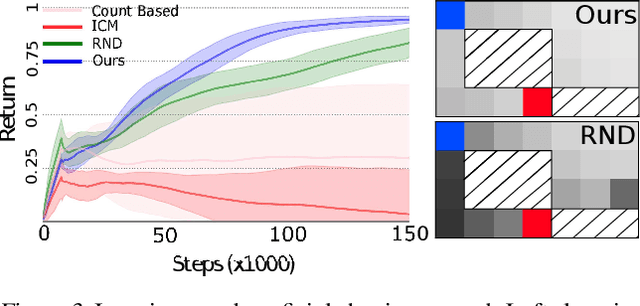
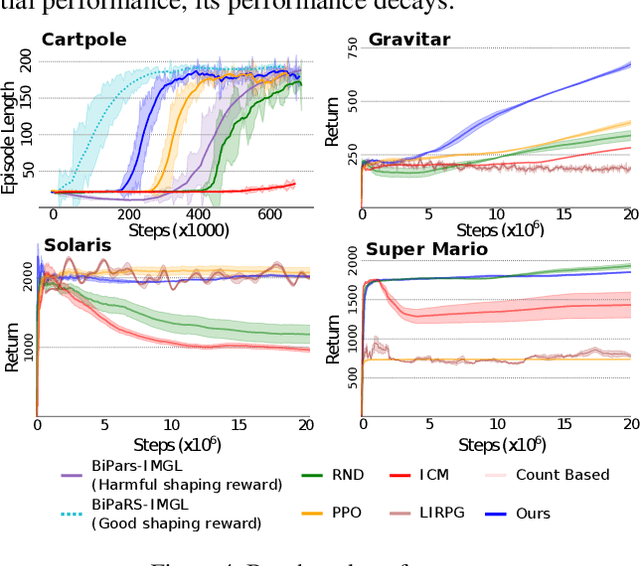
Reward shaping (RS) is a powerful method in reinforcement learning (RL) for overcoming the problem of sparse and uninformative rewards. However, RS relies on manually engineered shaping-reward functions whose construction is typically time-consuming and error-prone. It also requires domain knowledge which runs contrary to the goal of autonomous learning. In this paper, we introduce an automated RS framework in which the shaping-reward function is constructed in a novel stochastic game between two agents. One agent learns both which states to add shaping rewards and their optimal magnitudes and the other agent learns the optimal policy for the task using the shaped rewards. We prove theoretically that our framework, which easily adopts existing RL algorithms, learns to construct a shaping-reward function that is tailored to the task and ensures convergence to higher performing policies for the given task. We demonstrate the superior performance of our method against state-of-the-art RS algorithms in Cartpole and the challenging console games Gravitar, Solaris and Super Mario.