 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMemCast: Memory-Driven Time Series Forecasting with Experience-Conditioned Reasoning
Feb 03, 2026Time series forecasting (TSF) plays a critical role in decision-making for many real-world applications. Recently, LLM-based forecasters have made promising advancements. Despite their effectiveness, existing methods often lack explicit experience accumulation and continual evolution. In this work, we propose MemCast, a learning-to-memory framework that reformulates TSF as an experience-conditioned reasoning task. Specifically, we learn experience from the training set and organize it into a hierarchical memory. This is achieved by summarizing prediction results into historical patterns, distilling inference trajectories into reasoning wisdom, and inducing extracted temporal features into general laws. Furthermore, during inference, we leverage historical patterns to guide the reasoning process and utilize reasoning wisdom to select better trajectories, while general laws serve as criteria for reflective iteration. Additionally, to enable continual evolution, we design a dynamic confidence adaptation strategy that updates the confidence of individual entries without leaking the test set distribution. Extensive experiments on multiple datasets demonstrate that MemCast consistently outperforms previous methods, validating the effectiveness of our approach. Our code is available at https://github.com/Xiaoyu-Tao/MemCast-TS.
Position: Beyond Model-Centric Prediction -- Agentic Time Series Forecasting
Feb 02, 2026Time series forecasting has traditionally been formulated as a model-centric, static, and single-pass prediction problem that maps historical observations to future values. While this paradigm has driven substantial progress, it proves insufficient in adaptive and multi-turn settings where forecasting requires informative feature extraction, reasoning-driven inference, iterative refinement, and continual adaptation over time. In this paper, we argue for agentic time series forecasting (ATSF), which reframes forecasting as an agentic process composed of perception, planning, action, reflection, and memory. Rather than focusing solely on predictive models, ATSF emphasizes organizing forecasting as an agentic workflow that can interact with tools, incorporate feedback from outcomes, and evolve through experience accumulation. We outline three representative implementation paradigms -- workflow-based design, agentic reinforcement learning, and a hybrid agentic workflow paradigm -- and discuss the opportunities and challenges that arise when shifting from model-centric prediction to agentic forecasting. Together, this position aims to establish agentic forecasting as a foundation for future research at the intersection of time series forecasting.
AlphaCast: A Human Wisdom-LLM Intelligence Co-Reasoning Framework for Interactive Time Series Forecasting
Nov 12, 2025Time series forecasting plays a critical role in high-stakes domains such as energy, healthcare, and climate. Although recent advances have improved accuracy, most approaches still treat forecasting as a static one-time mapping task, lacking the interaction, reasoning, and adaptability of human experts. This gap limits their usefulness in complex real-world environments. To address this, we propose AlphaCast, a human wisdom-large language model (LLM) intelligence co-reasoning framework that redefines forecasting as an interactive process. The key idea is to enable step-by-step collaboration between human wisdom and LLM intelligence to jointly prepare, generate, and verify forecasts. The framework consists of two stages: (1) automated prediction preparation, where AlphaCast builds a multi-source cognitive foundation comprising a feature set that captures key statistics and time patterns, a domain knowledge base distilled from corpora and historical series, a contextual repository that stores rich information for each time window, and a case base that retrieves optimal strategies via pattern clustering and matching; and (2) generative reasoning and reflective optimization, where AlphaCast integrates statistical temporal features, prior knowledge, contextual information, and forecasting strategies, triggering a meta-reasoning loop for continuous self-correction and strategy refinement. Extensive experiments on short- and long-term datasets show that AlphaCast consistently outperforms state-of-the-art baselines in predictive accuracy. Code is available at this repository: https://github.com/SkyeGT/AlphaCast_Official .
MemWeaver: A Hierarchical Memory from Textual Interactive Behaviors for Personalized Generation
Oct 09, 2025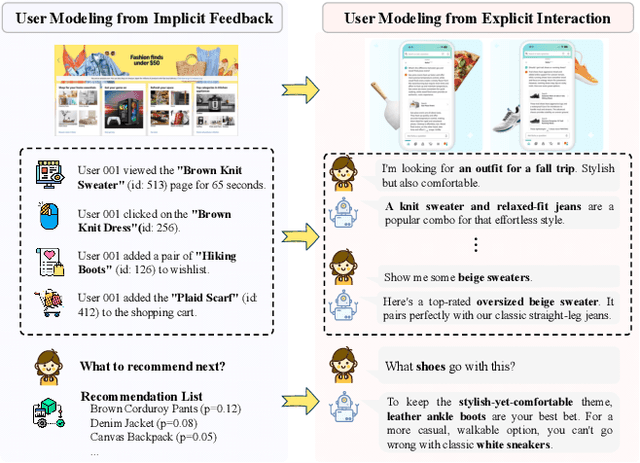
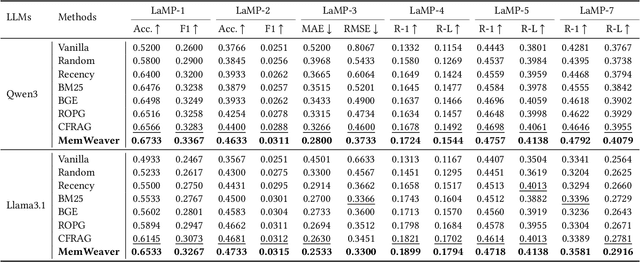
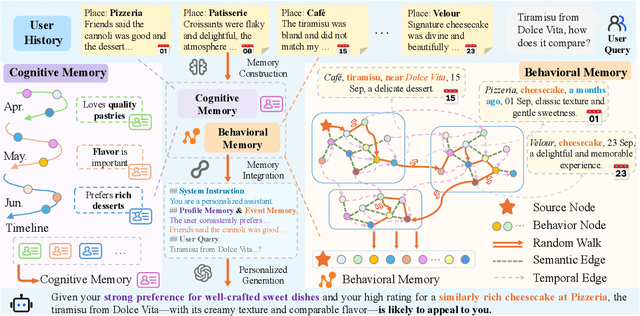
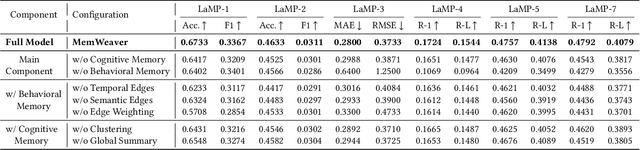
The primary form of user-internet engagement is shifting from leveraging implicit feedback signals, such as browsing and clicks, to harnessing the rich explicit feedback provided by textual interactive behaviors. This shift unlocks a rich source of user textual history, presenting a profound opportunity for a deeper form of personalization. However, prevailing approaches offer only a shallow form of personalization, as they treat user history as a flat list of texts for retrieval and fail to model the rich temporal and semantic structures reflecting dynamic nature of user interests. In this work, we propose \textbf{MemWeaver}, a framework that weaves the user's entire textual history into a hierarchical memory to power deeply personalized generation. The core innovation of our memory lies in its ability to capture both the temporal evolution of interests and the semantic relationships between different activities. To achieve this, MemWeaver builds two complementary memory components that both integrate temporal and semantic information, but at different levels of abstraction: behavioral memory, which captures specific user actions, and cognitive memory, which represents long-term preferences. This dual-component memory serves as a unified representation of the user, allowing large language models (LLMs) to reason over both concrete behaviors and abstracted traits. Experiments on the Language Model Personalization (LaMP) benchmark validate the efficacy of MemWeaver. Our code is available\footnote{https://github.com/fishsure/MemWeaver}.
Language and Sketching: An LLM-driven Interactive Multimodal Multitask Robot Navigation Framework
Nov 14, 2023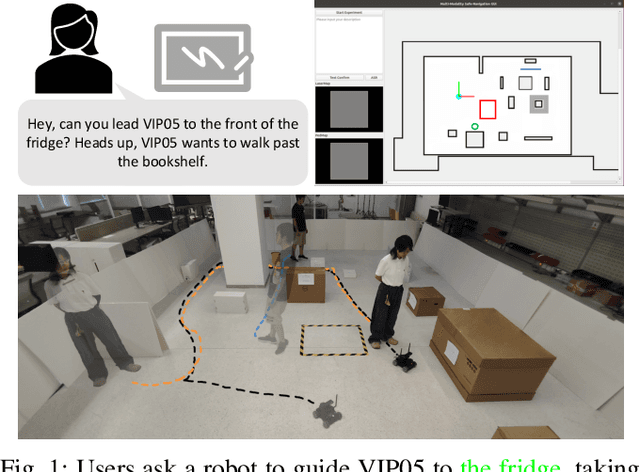
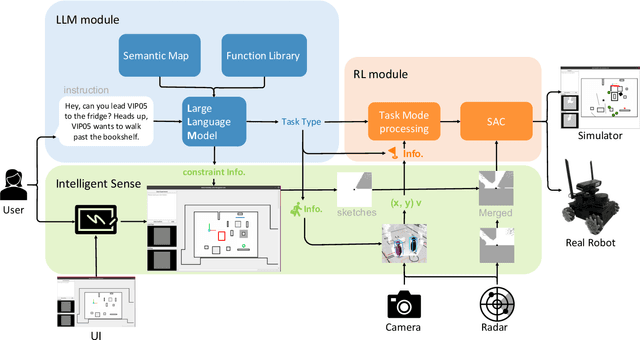
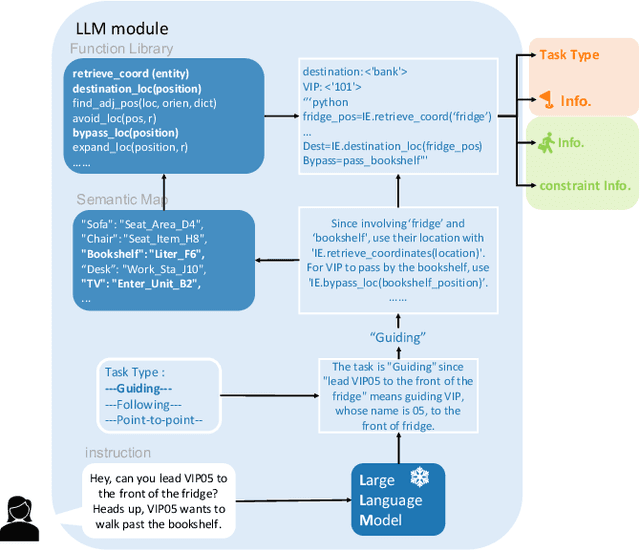
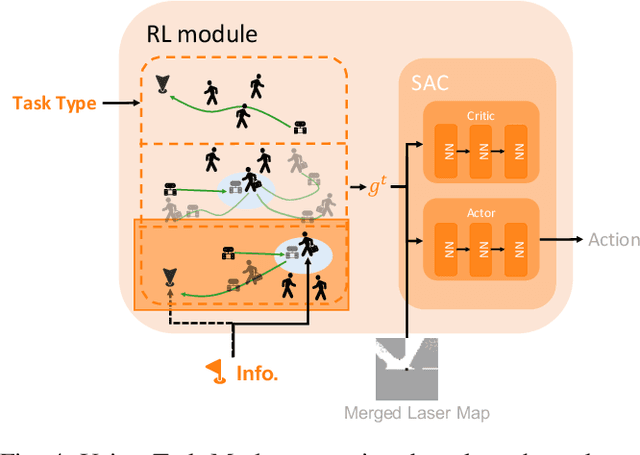
The socially-aware navigation system has evolved to adeptly avoid various obstacles while performing multiple tasks, such as point-to-point navigation, human-following, and -guiding. However, a prominent gap persists: in Human-Robot Interaction (HRI), the procedure of communicating commands to robots demands intricate mathematical formulations. Furthermore, the transition between tasks does not quite possess the intuitive control and user-centric interactivity that one would desire. In this work, we propose an LLM-driven interactive multimodal multitask robot navigation framework, termed LIM2N, to solve the above new challenge in the navigation field. We achieve this by first introducing a multimodal interaction framework where language and hand-drawn inputs can serve as navigation constraints and control objectives. Next, a reinforcement learning agent is built to handle multiple tasks with the received information. Crucially, LIM2N creates smooth cooperation among the reasoning of multimodal input, multitask planning, and adaptation and processing of the intelligent sensing modules in the complicated system. Extensive experiments are conducted in both simulation and the real world demonstrating that LIM2N has superior user needs understanding, alongside an enhanced interactive experience.