 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Novel Multi-Reference-Point Modeling Framework for Monostatic Background Channel: Toward 3GPP ISAC Standardization
Nov 05, 2025Integrated Sensing and Communication (ISAC) has been identified as a key 6G application by ITU and 3GPP. A realistic, standard-compatible channel model is essential for ISAC system design. To characterize the impact of Sensing Targets (STs), 3GPP defines ISAC channel as a combination of target and background channels, comprising multipath components related to STs and those originating solely from the environment, respectively. Although the background channel does not carry direct ST information, its accurate modeling is critical for evaluating sensing performance, especially in complex environments. Existing communication standards characterize propagation between separated transmitter (Tx) and receiver (Rx). However, modeling background channels in the ISAC monostatic mode, where the Tx and Rx are co-located, remains a pressing challenge. In this paper, we firstly conduct ISAC monostatic background channel measurements for an indoor scenario at 28 GHz. Realistic channel parameters are extracted, revealing pronounced single-hop propagation and discrete multipath distribution. Inspired by these properties, a novel stochastic model is proposed to characterizing the ISAC monostatic background channel as the superposition of sub-channels between the monostatic Tx&Rx and multiple communication Rx-like Reference Points (RPs). This model is compatible with standardizations, and a 3GPP-extended implementation framework is introduced. Finally, a genetic algorithm-based method is proposed to extract the optimal number and placement of multi-RPs. The optimization approach and modeling framework are validated by comparing measured and simulated channel parameters. Results demonstrate that the proposed model effectively captures monostatic background channel characteristics, addresses a critical gap in ISAC channel modeling, and supports 6G standardization.
Interleaved Transceiver Design for a Continuous- Transmission MIMO-OFDM ISAC System
Aug 14, 2025This paper proposes an interleaved transceiver design method for a multiple-input multiple-output (MIMO) integrated sensing and communication (ISAC) system utilizing orthogonal frequency division multiplexing (OFDM) waveforms. We consider a continuous transmission system and focus on the design of the transmission signal and a receiving filter in the time domain for an interleaved transmission architecture. For communication performance, constructive interference (CI) is integrated into the optimization problem. For radar sensing performance, the integrated mainlobe-to-sidelobe ratio (IMSR) of the beampattern is considered to ensure desirable directivity. Additionally, we tackle the challenges of inter-block interference and eliminate the spurious peaks, which are crucial for accurate target detection. Regarding the hardware implementation aspect, the power of each time sample is constrained to manage the peak-to-average power ratio (PAPR). The design problem is addressed using an alternating optimization (AO) framework, with the subproblem for transmitted waveform design being solved via the successive convex approximation (SCA) method. To further enhance computational efficiency, the alternate direction penalty method (ADPM) is employed to solve the subproblems within the SCA iterations. The convergence of ADPM is established, with convergence of the case of more than two auxiliary variables being established for the first time. Numerical simulations validate the effectiveness of our transceiver design in achieving desirable performance in both radar sensing and communication, with the fast algorithm achieving comparable performance with greater computational efficiency.
HGSFusion: Radar-Camera Fusion with Hybrid Generation and Synchronization for 3D Object Detection
Dec 16, 2024



Millimeter-wave radar plays a vital role in 3D object detection for autonomous driving due to its all-weather and all-lighting-condition capabilities for perception. However, radar point clouds suffer from pronounced sparsity and unavoidable angle estimation errors. To address these limitations, incorporating a camera may partially help mitigate the shortcomings. Nevertheless, the direct fusion of radar and camera data can lead to negative or even opposite effects due to the lack of depth information in images and low-quality image features under adverse lighting conditions. Hence, in this paper, we present the radar-camera fusion network with Hybrid Generation and Synchronization (HGSFusion), designed to better fuse radar potentials and image features for 3D object detection. Specifically, we propose the Radar Hybrid Generation Module (RHGM), which fully considers the Direction-Of-Arrival (DOA) estimation errors in radar signal processing. This module generates denser radar points through different Probability Density Functions (PDFs) with the assistance of semantic information. Meanwhile, we introduce the Dual Sync Module (DSM), comprising spatial sync and modality sync, to enhance image features with radar positional information and facilitate the fusion of distinct characteristics in different modalities. Extensive experiments demonstrate the effectiveness of our approach, outperforming the state-of-the-art methods in the VoD and TJ4DRadSet datasets by $6.53\%$ and $2.03\%$ in RoI AP and BEV AP, respectively. The code is available at https://github.com/garfield-cpp/HGSFusion.
Joint Design of ISAC Waveform under PAPR Constraints
Nov 20, 2023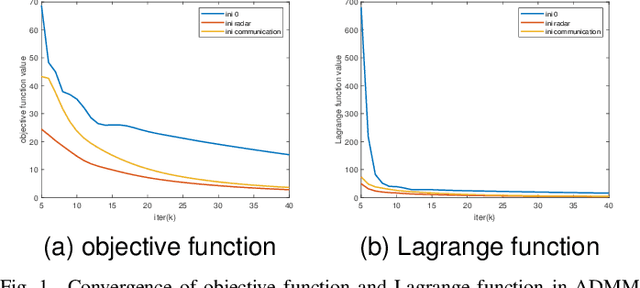

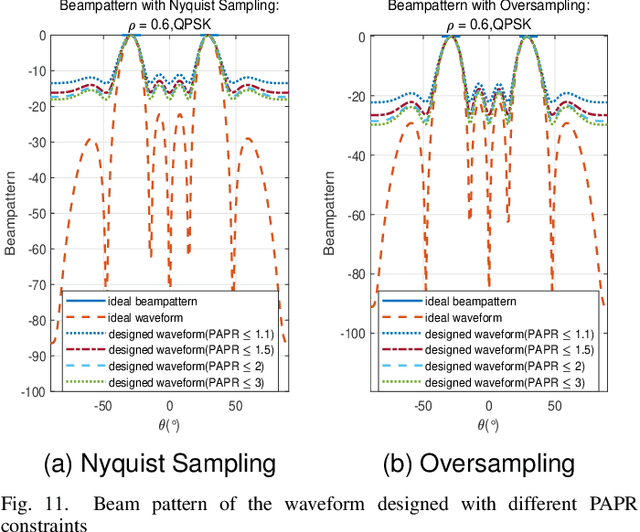
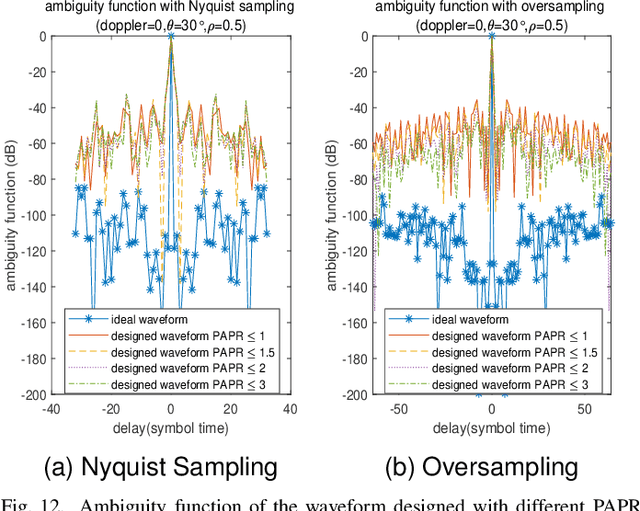
In this paper, we formulate the precoding problem of integrated sensing and communication (ISAC) waveform as a non-convex quadratically constrainted quadratic program (QCQP), in which the weighted sum of communication multi-user interference (MUI) and the gap between dual-use waveform and ideal radar waveform is minimized with peak-to-average power ratio (PAPR) constraints. We propose an efficient algorithm based on alternating direction method of multipliers (ADMM), which is able to decouple multiple variables and provide a closed-form solution for each subproblem. In addition, to improve the sensing performance in both spatial and temporal domains, we propose a new criteria to design the ideal radar waveform, in which the beam pattern is made similar to the ideal one and the integrated sidelobe level of the ambiguity function in each target direction is minimized in the region of interest. The limited memory Broyden-Fletcher-Goldfarb-Shanno (L-BFGS) algorithm is applied to the design of the ideal radar waveform which works as a reference in the design of the dual-function waveform. Numerical results indicate that the designed dual-function waveform is capable of offering good communication quality of service (QoS) and sensing performance.
Proprioceptive Learning with Soft Polyhedral Networks
Aug 16, 2023



Proprioception is the "sixth sense" that detects limb postures with motor neurons. It requires a natural integration between the musculoskeletal systems and sensory receptors, which is challenging among modern robots that aim for lightweight, adaptive, and sensitive designs at a low cost. Here, we present the Soft Polyhedral Network with an embedded vision for physical interactions, capable of adaptive kinesthesia and viscoelastic proprioception by learning kinetic features. This design enables passive adaptations to omni-directional interactions, visually captured by a miniature high-speed motion tracking system embedded inside for proprioceptive learning. The results show that the soft network can infer real-time 6D forces and torques with accuracies of 0.25/0.24/0.35 N and 0.025/0.034/0.006 Nm in dynamic interactions. We also incorporate viscoelasticity in proprioception during static adaptation by adding a creep and relaxation modifier to refine the predicted results. The proposed soft network combines simplicity in design, omni-adaptation, and proprioceptive sensing with high accuracy, making it a versatile solution for robotics at a low cost with more than 1 million use cycles for tasks such as sensitive and competitive grasping, and touch-based geometry reconstruction. This study offers new insights into vision-based proprioception for soft robots in adaptive grasping, soft manipulation, and human-robot interaction.
NTIRE 2023 Quality Assessment of Video Enhancement Challenge
Jul 19, 2023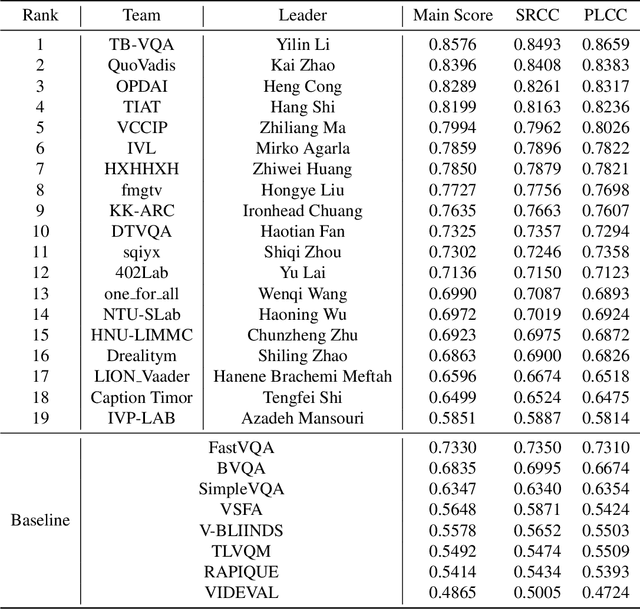
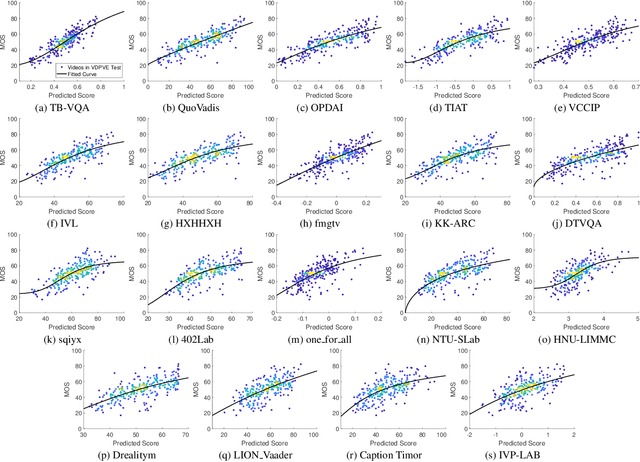
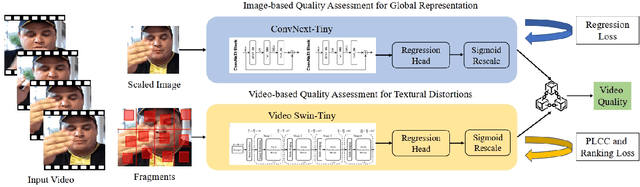

This paper reports on the NTIRE 2023 Quality Assessment of Video Enhancement Challenge, which will be held in conjunction with the New Trends in Image Restoration and Enhancement Workshop (NTIRE) at CVPR 2023. This challenge is to address a major challenge in the field of video processing, namely, video quality assessment (VQA) for enhanced videos. The challenge uses the VQA Dataset for Perceptual Video Enhancement (VDPVE), which has a total of 1211 enhanced videos, including 600 videos with color, brightness, and contrast enhancements, 310 videos with deblurring, and 301 deshaked videos. The challenge has a total of 167 registered participants. 61 participating teams submitted their prediction results during the development phase, with a total of 3168 submissions. A total of 176 submissions were submitted by 37 participating teams during the final testing phase. Finally, 19 participating teams submitted their models and fact sheets, and detailed the methods they used. Some methods have achieved better results than baseline methods, and the winning methods have demonstrated superior prediction performance.
Motion-Aware Transformer For Occluded Person Re-identification
Feb 10, 2022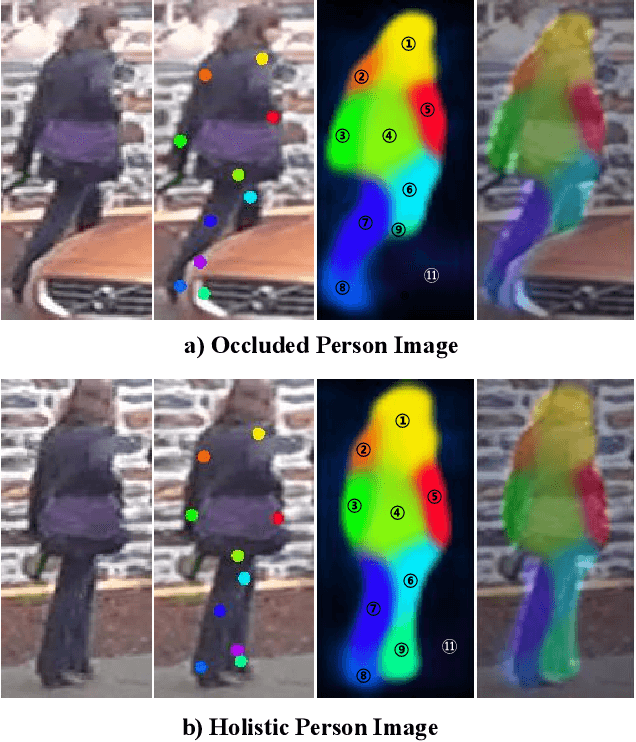
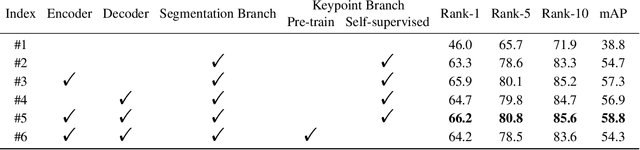
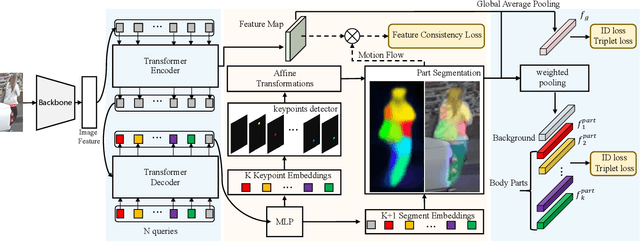
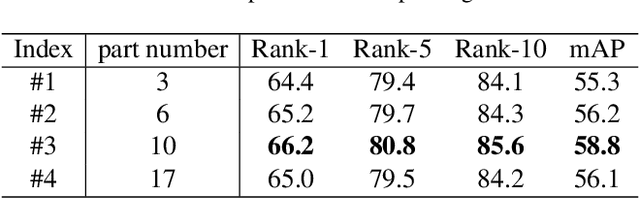
Recently, occluded person re-identification(Re-ID) remains a challenging task that people are frequently obscured by other people or obstacles, especially in a crowd massing situation. In this paper, we propose a self-supervised deep learning method to improve the location performance for human parts through occluded person Re-ID. Unlike previous works, we find that motion information derived from the photos of various human postures can help identify major human body components. Firstly, a motion-aware transformer encoder-decoder architecture is designed to obtain keypoints heatmaps and part-segmentation maps. Secondly, an affine transformation module is utilized to acquire motion information from the keypoint detection branch. Then the motion information will support the segmentation branch to achieve refined human part segmentation maps, and effectively divide the human body into reasonable groups. Finally, several cases demonstrate the efficiency of the proposed model in distinguishing different representative parts of the human body, which can avoid the background and occlusion disturbs. Our method consistently achieves state-of-the-art results on several popular datasets, including occluded, partial, and holistic.
GAN-Knowledge Distillation for one-stage Object Detection
Jul 04, 2019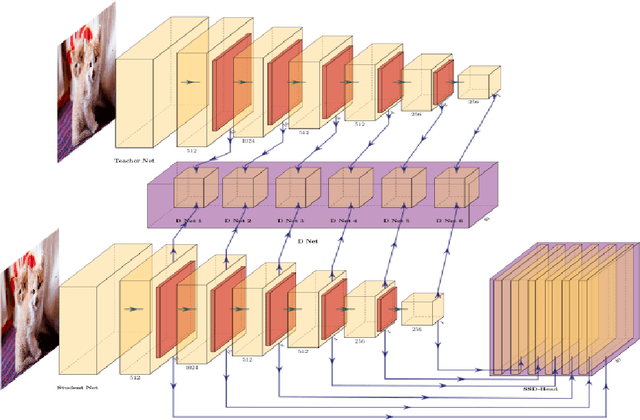
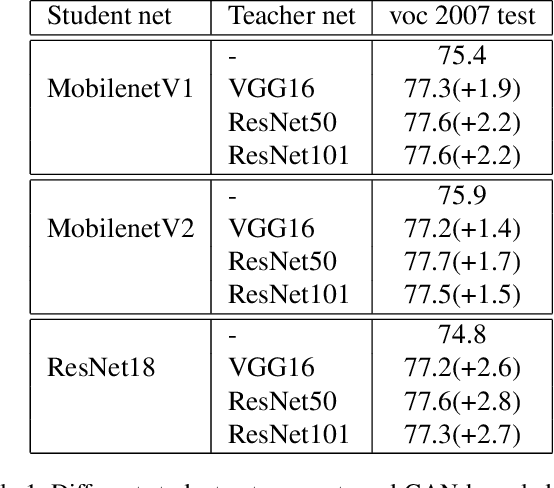
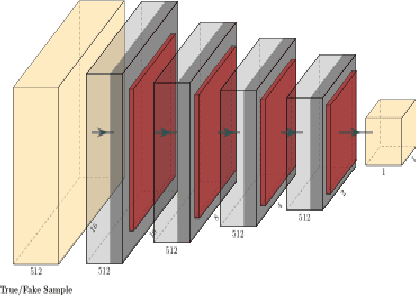
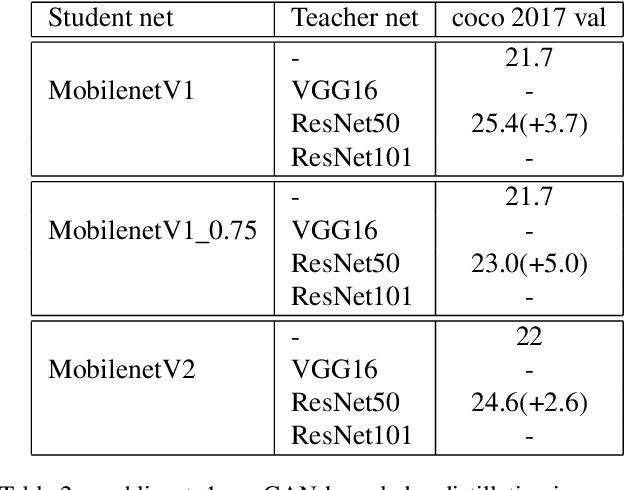
Convolutional neural networks have a significant improvement in the accuracy of Object detection. As convolutional neural networks become deeper, the accuracy of detection is also obviously improved, and more floating-point calculations are needed. Many researchers use the knowledge distillation method to improve the accuracy of student networks by transferring knowledge from a deeper and larger teachers network to a small student network, in object detection. Most methods of knowledge distillation need to designed complex cost functions and they are aimed at the two-stage object detection algorithm. This paper proposes a clean and effective knowledge distillation method for the one-stage object detection. The feature maps generated by teacher network and student network are used as true samples and fake samples respectively, and generate adversarial training for both to improve the performance of the student network in one-stage object detection.