 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLow-Complexity Sparse Superimposed Coding for Ultra Reliable Low Latency Communications
Jan 22, 2026Sparse superimposed coding (SSC) has emerged as a promising technique for short-packet transmission in ultra-reliable low-latency communication scenarios. However, conventional SSC schemes often suffer from high encoding and decoding complexity due to the use of dense codebook matrices. In this paper, we propose a low-complexity SSC scheme by designing a sparse codebook structure, where each codeword contains only a small number of non-zero elements. The decoding is performed using the traditional multipath matching pursuit algorithm, and the overall complexity is significantly reduced by exploiting the sparsity of the codebook. Simulation results show that the proposed scheme achieves a favorable trade-off between BLER performance and computational complexity, and exhibits strong robustness across different transmission block lengths.
Internet of Agents: Fundamentals, Applications, and Challenges
May 12, 2025



With the rapid proliferation of large language models and vision-language models, AI agents have evolved from isolated, task-specific systems into autonomous, interactive entities capable of perceiving, reasoning, and acting without human intervention. As these agents proliferate across virtual and physical environments, from virtual assistants to embodied robots, the need for a unified, agent-centric infrastructure becomes paramount. In this survey, we introduce the Internet of Agents (IoA) as a foundational framework that enables seamless interconnection, dynamic discovery, and collaborative orchestration among heterogeneous agents at scale. We begin by presenting a general IoA architecture, highlighting its hierarchical organization, distinguishing features relative to the traditional Internet, and emerging applications. Next, we analyze the key operational enablers of IoA, including capability notification and discovery, adaptive communication protocols, dynamic task matching, consensus and conflict-resolution mechanisms, and incentive models. Finally, we identify open research directions toward building resilient and trustworthy IoA ecosystems.
Movable Antennas Enabled ISAC Systems: Fundamentals, Opportunities, and Future Directions
Dec 30, 2024The movable antenna (MA)-enabled integrated sensing and communication (ISAC) system attracts widespread attention as an innovative framework. The ISAC system integrates sensing and communication functions, achieving resource sharing across various domains, significantly enhancing communication and sensing performance, and promoting the intelligent interconnection of everything. Meanwhile, MA utilizes the spatial variations of wireless channels by dynamically adjusting the positions of MA elements at the transmitter and receiver to improve the channel and further enhance the performance of the ISAC systems. In this paper, we first outline the fundamental principles of MA and introduce the application scenarios of MA-enabled ISAC systems. Then, we summarize the advantages of MA-enabled ISAC systems in enhancing spectral efficiency, achieving flexible and precise beamforming, and making the signal coverage range adjustable. Besides, a specific case is studied to show the performance gains in terms of transmit power that MA brings to ISAC systems. Finally, we discuss the challenges of MA-enabled ISAC and future research directions, aiming to provide insights for future research on MA-enabled ISAC systems.
Large Model Agents: State-of-the-Art, Cooperation Paradigms, Security and Privacy, and Future Trends
Sep 22, 2024



Large Model (LM) agents, powered by large foundation models such as GPT-4 and DALL-E 2, represent a significant step towards achieving Artificial General Intelligence (AGI). LM agents exhibit key characteristics of autonomy, embodiment, and connectivity, allowing them to operate across physical, virtual, and mixed-reality environments while interacting seamlessly with humans, other agents, and their surroundings. This paper provides a comprehensive survey of the state-of-the-art in LM agents, focusing on the architecture, cooperation paradigms, security, privacy, and future prospects. Specifically, we first explore the foundational principles of LM agents, including general architecture, key components, enabling technologies, and modern applications. Then, we discuss practical collaboration paradigms from data, computation, and knowledge perspectives towards connected intelligence of LM agents. Furthermore, we systematically analyze the security vulnerabilities and privacy breaches associated with LM agents, particularly in multi-agent settings. We also explore their underlying mechanisms and review existing and potential countermeasures. Finally, we outline future research directions for building robust and secure LM agent ecosystems.
Learning Decentralized Traffic Signal Controllers with Multi-Agent Graph Reinforcement Learning
Nov 07, 2023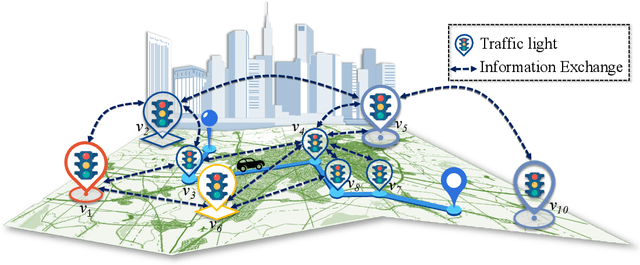
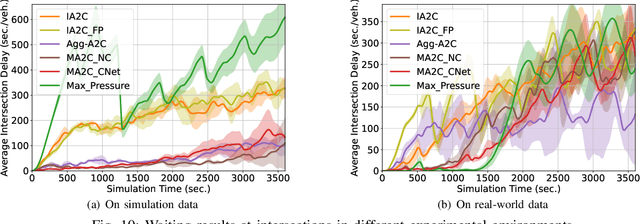
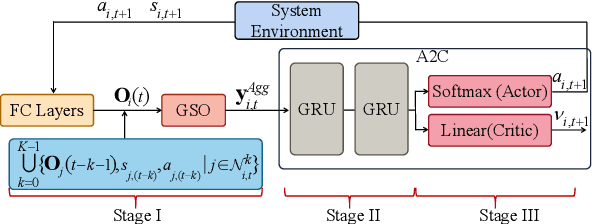
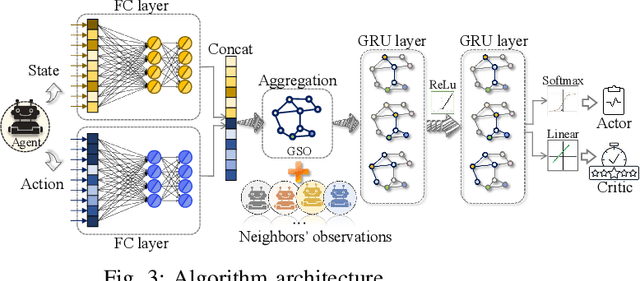
This paper considers optimal traffic signal control in smart cities, which has been taken as a complex networked system control problem. Given the interacting dynamics among traffic lights and road networks, attaining controller adaptivity and scalability stands out as a primary challenge. Capturing the spatial-temporal correlation among traffic lights under the framework of Multi-Agent Reinforcement Learning (MARL) is a promising solution. Nevertheless, existing MARL algorithms ignore effective information aggregation which is fundamental for improving the learning capacity of decentralized agents. In this paper, we design a new decentralized control architecture with improved environmental observability to capture the spatial-temporal correlation. Specifically, we first develop a topology-aware information aggregation strategy to extract correlation-related information from unstructured data gathered in the road network. Particularly, we transfer the road network topology into a graph shift operator by forming a diffusion process on the topology, which subsequently facilitates the construction of graph signals. A diffusion convolution module is developed, forming a new MARL algorithm, which endows agents with the capabilities of graph learning. Extensive experiments based on both synthetic and real-world datasets verify that our proposal outperforms existing decentralized algorithms.
Label-free Deep Learning Driven Secure Access Selection in Space-Air-Ground Integrated Networks
Aug 28, 2023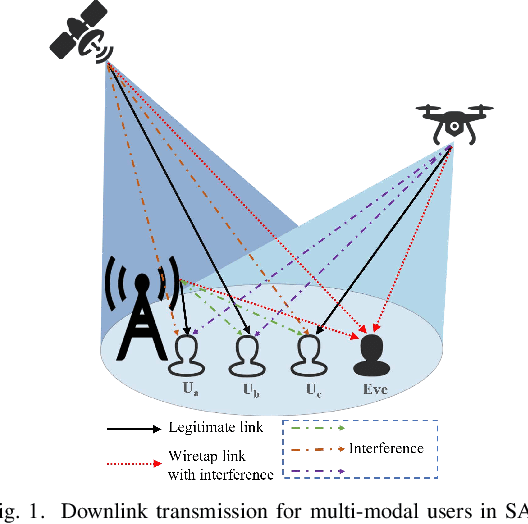
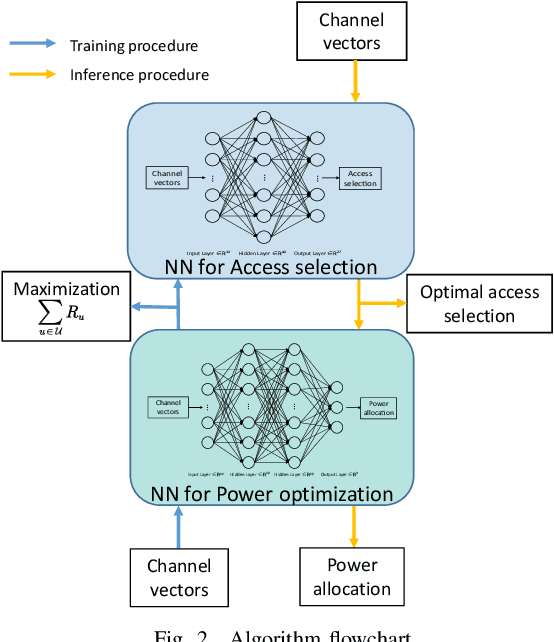
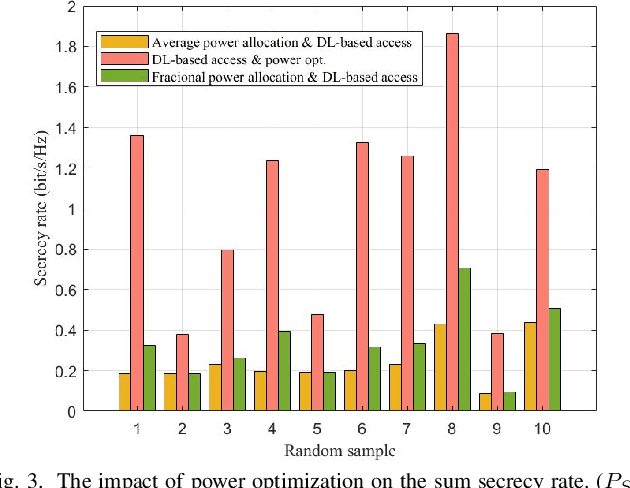
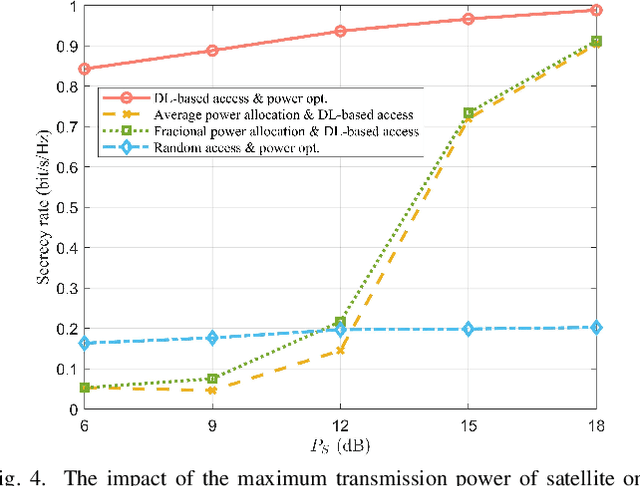
In Space-air-ground integrated networks (SAGIN), the inherent openness and extensive broadcast coverage expose these networks to significant eavesdropping threats. Considering the inherent co-channel interference due to spectrum sharing among multi-tier access networks in SAGIN, it can be leveraged to assist the physical layer security among heterogeneous transmissions. However, it is challenging to conduct a secrecy-oriented access strategy due to both heterogeneous resources and different eavesdropping models. In this paper, we explore secure access selection for a scenario involving multi-mode users capable of accessing satellites, unmanned aerial vehicles, or base stations in the presence of eavesdroppers. Particularly, we propose a Q-network approximation based deep learning approach for selecting the optimal access strategy for maximizing the sum secrecy rate. Meanwhile, the power optimization is also carried out by an unsupervised learning approach to improve the secrecy performance. Remarkably, two neural networks are trained by unsupervised learning and Q-network approximation which are both label-free methods without knowing the optimal solution as labels. Numerical results verify the efficiency of our proposed power optimization approach and access strategy, leading to enhanced secure transmission performance.
An Efficient and Reliable Asynchronous Federated Learning Scheme for Smart Public Transportation
Aug 30, 2022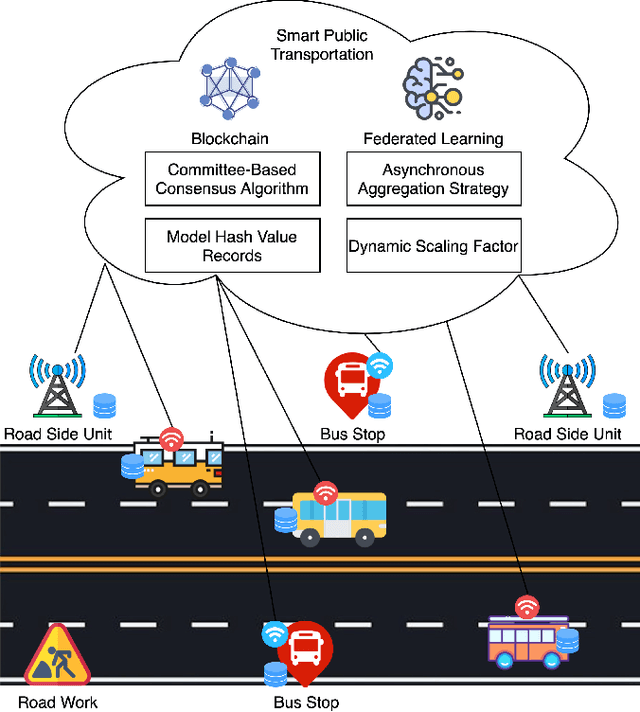
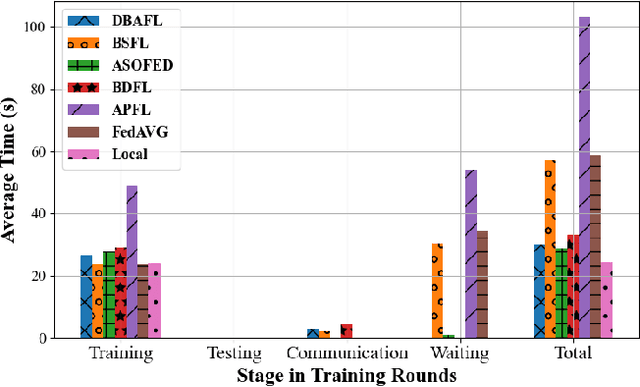
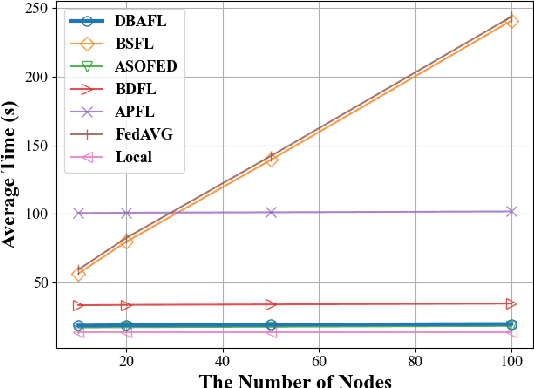
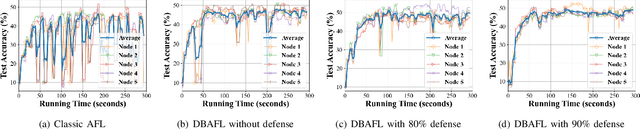
Since the traffic conditions change over time, machine learning models that predict traffic flows must be updated continuously and efficiently in smart public transportation. Federated learning (FL) is a distributed machine learning scheme that allows buses to receive model updates without waiting for model training on the cloud. However, FL is vulnerable to poisoning or DDoS attacks since buses travel in public. Some work introduces blockchain to improve reliability, but the additional latency from the consensus process reduces the efficiency of FL. Asynchronous Federated Learning (AFL) is a scheme that reduces the latency of aggregation to improve efficiency, but the learning performance is unstable due to unreasonably weighted local models. To address the above challenges, this paper offers a blockchain-based asynchronous federated learning scheme with a dynamic scaling factor (DBAFL). Specifically, the novel committee-based consensus algorithm for blockchain improves reliability at the lowest possible cost of time. Meanwhile, the devised dynamic scaling factor allows AFL to assign reasonable weights to stale local models. Extensive experiments conducted on heterogeneous devices validate outperformed learning performance, efficiency, and reliability of DBAFL.
Green Interference Based Symbiotic Security in Integrated Satellite-terrestrial Communications
Jun 06, 2022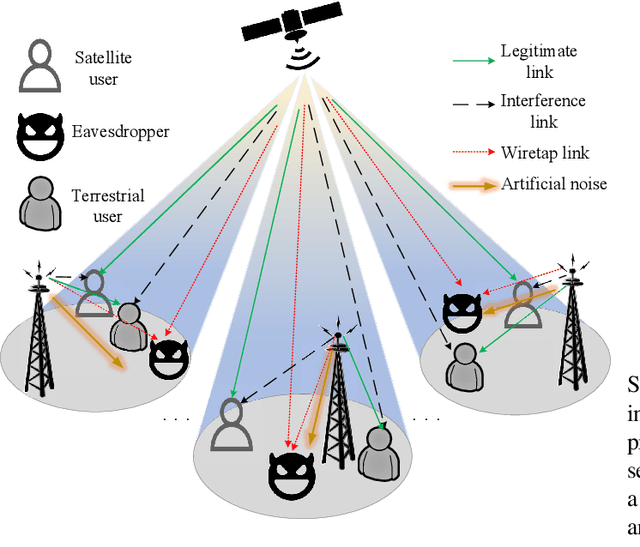
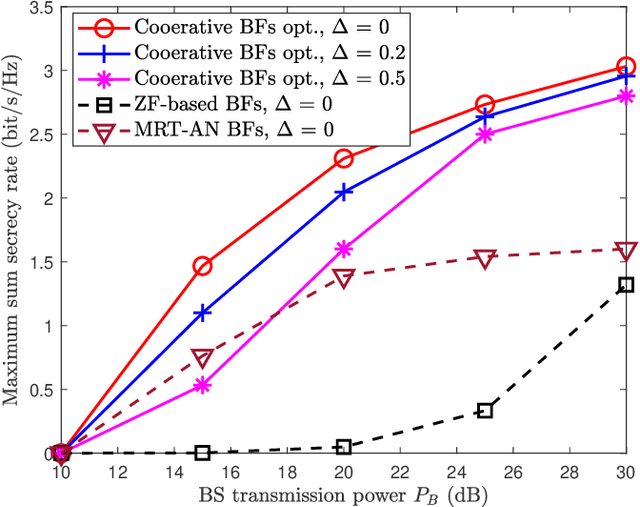

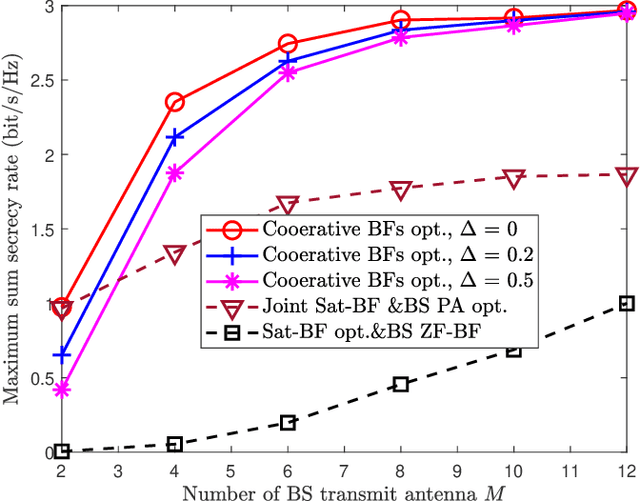
In this paper, we investigate secure transmissions in integrated satellite-terrestrial communications and the green interference based symbiotic security scheme is proposed. Particularly, the co-channel interference induced by the spectrum sharing between satellite and terrestrial networks and the inter-beam interference due to frequency reuse among satellite multi-beam serve as the green interference to assist the symbiotic secure transmission, where the secure transmissions of both satellite and terrestrial links are guaranteed simultaneously. Specifically, to realize the symbiotic security, we formulate a problem to maximize the sum secrecy rate of satellite users by cooperatively beamforming optimizing and a constraint of secrecy rate of each terrestrial user is guaranteed. Since the formulated problem is non-convex and intractable, the Taylor expansion and semi-definite relaxation (SDR) are adopted to further reformulate this problem, and the successive convex approximation (SCA) algorithm is designed to solve it. Finally, the tightness of the relaxation is proved. In addition, numerical results verify the efficiency of our proposed approach.
Collaborative Driving: Learning- Aided Joint Topology Formulation and Beamforming
Mar 18, 2022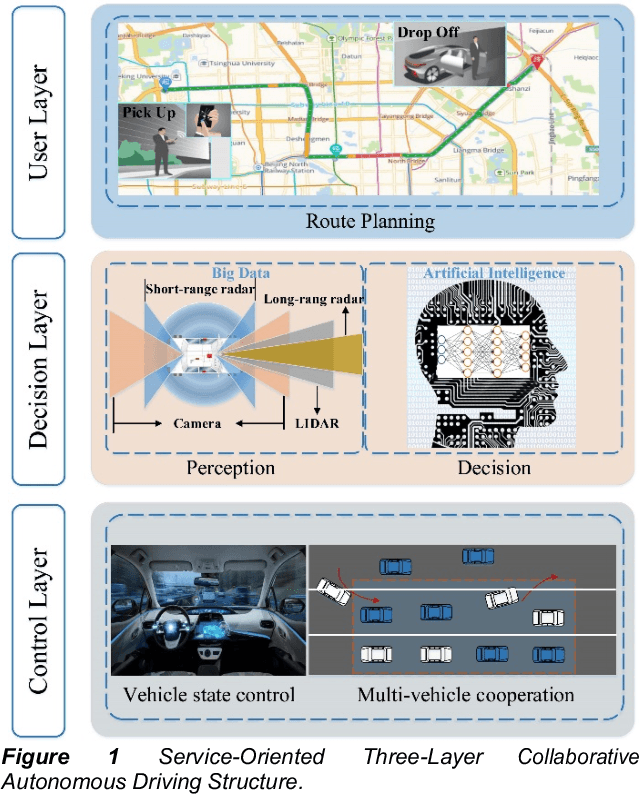
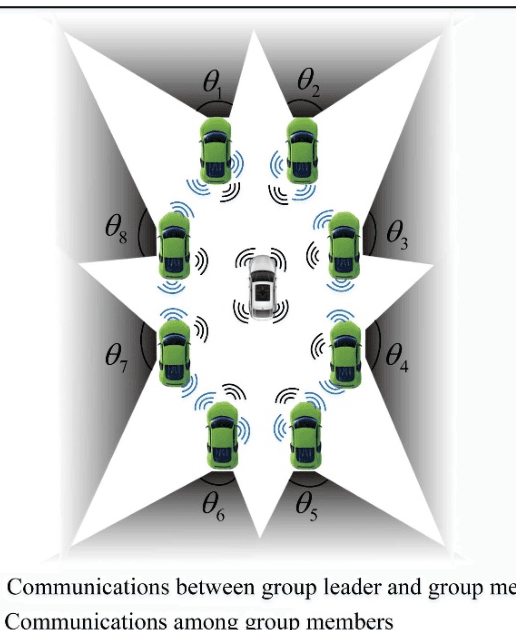
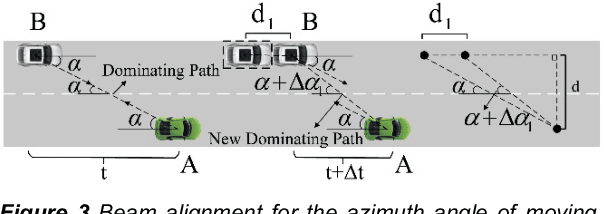
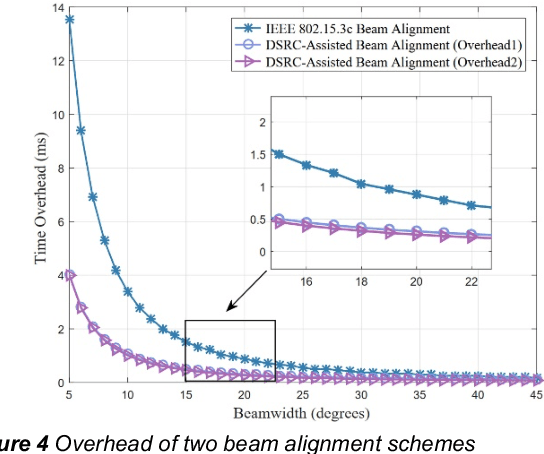
Currently, autonomous vehicles are able to drive more naturally based on the driving policies learned from millions of driving miles in real environments. However, to further improve the automation level of vehicles is a challenging task, especially in the case of multi-vehicle cooperation. In recent heated discussions of 6G, millimeter-wave (mmWave) and terahertz (THz) bands are deemed to play important roles in new radio communication architectures and algorithms. To enable reliable autonomous driving in 6G, in this paper, we envision collaborative autonomous driving, a new framework that jointly controls driving topology and formulate vehicular networks in the mmWave/THz bands. As a swarm intelligence system, the collaborative driving scheme goes beyond existing autonomous driving patterns based on single-vehicle intelligence in terms of safety and efficiency. With efficient data sharing, the proposed framework is able to achieve cooperative sensing and load balancing so that improve sensing efficiency with saved computational resources. To deal with the new challenges in the collaborative driving framework, we further illustrate two promising approaches for mmWave/THz-based vehicle-to-vehicle (V2V) communications. Finally, we discuss several potential open research problems for the proposed collaborative driving scheme.
Learning Based Task Offloading in Digital Twin Empowered Internet of Vehicles
Dec 28, 2021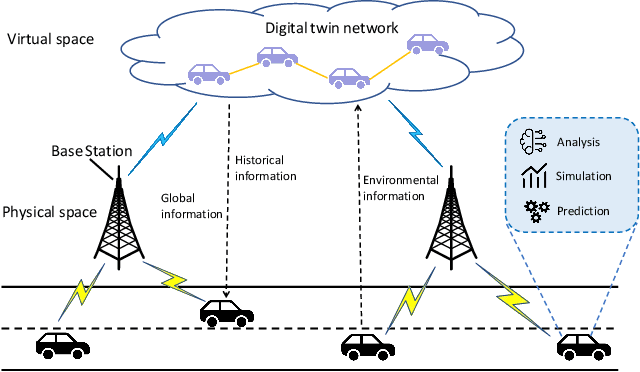
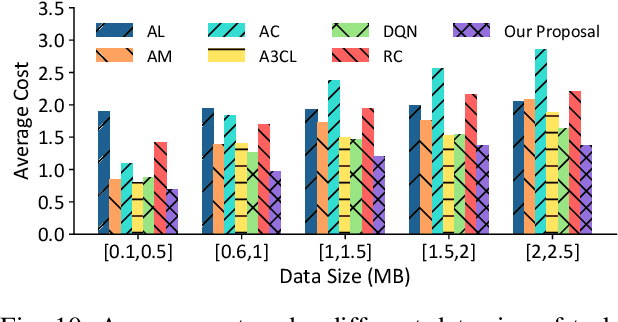

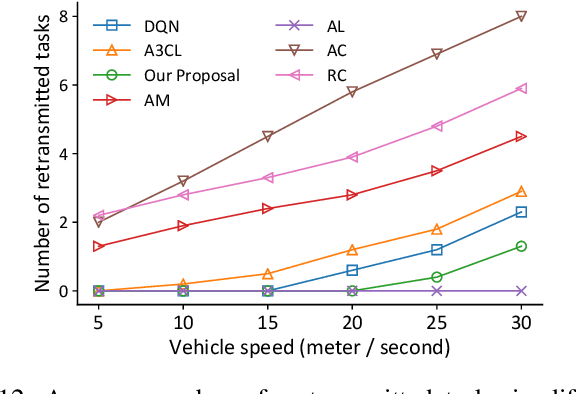
Mobile edge computing has become an effective and fundamental paradigm for futuristic autonomous vehicles to offload computing tasks. However, due to the high mobility of vehicles, the dynamics of the wireless conditions, and the uncertainty of the arrival computing tasks, it is difficult for a single vehicle to determine the optimal offloading strategy. In this paper, we propose a Digital Twin (DT) empowered task offloading framework for Internet of Vehicles. As a software agent residing in the cloud, a DT can obtain both global network information by using communications among DTs, and historical information of a vehicle by using the communications within the twin. The global network information and historical vehicular information can significantly facilitate the offloading. In specific, to preserve the precious computing resource at different levels for most appropriate computing tasks, we integrate a learning scheme based on the prediction of futuristic computing tasks in DT. Accordingly, we model the offloading scheduling process as a Markov Decision Process (MDP) to minimize the long-term cost in terms of a trade off between task latency, energy consumption, and renting cost of clouds. Simulation results demonstrate that our algorithm can effectively find the optimal offloading strategy, as well as achieve the fast convergence speed and high performance, compared with other existing approaches.