 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCollaborative Driving: Learning- Aided Joint Topology Formulation and Beamforming
Mar 18, 2022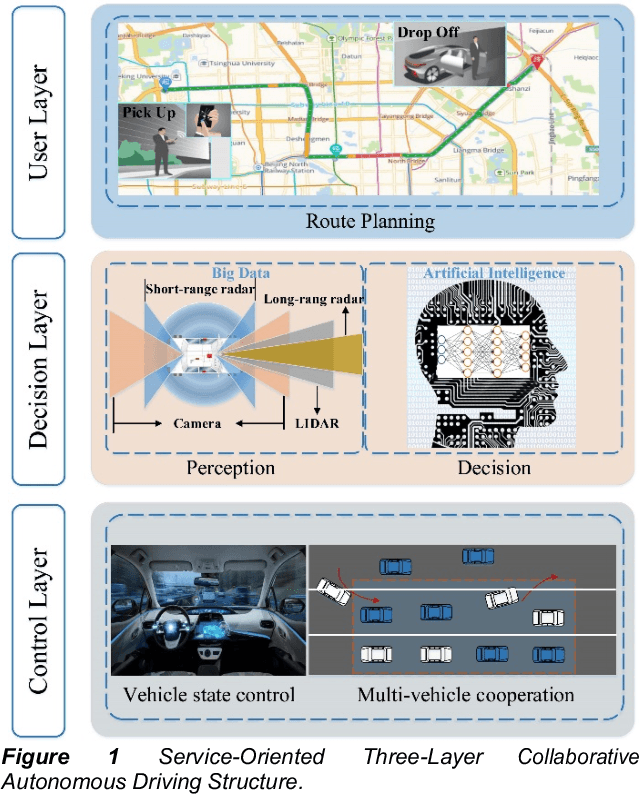
Currently, autonomous vehicles are able to drive more naturally based on the driving policies learned from millions of driving miles in real environments. However, to further improve the automation level of vehicles is a challenging task, especially in the case of multi-vehicle cooperation. In recent heated discussions of 6G, millimeter-wave (mmWave) and terahertz (THz) bands are deemed to play important roles in new radio communication architectures and algorithms. To enable reliable autonomous driving in 6G, in this paper, we envision collaborative autonomous driving, a new framework that jointly controls driving topology and formulate vehicular networks in the mmWave/THz bands. As a swarm intelligence system, the collaborative driving scheme goes beyond existing autonomous driving patterns based on single-vehicle intelligence in terms of safety and efficiency. With efficient data sharing, the proposed framework is able to achieve cooperative sensing and load balancing so that improve sensing efficiency with saved computational resources. To deal with the new challenges in the collaborative driving framework, we further illustrate two promising approaches for mmWave/THz-based vehicle-to-vehicle (V2V) communications. Finally, we discuss several potential open research problems for the proposed collaborative driving scheme.