 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHeterogeneous Vertiport Selection Optimization for On-Demand Air Taxi Services: A Deep Reinforcement Learning Approach
Jan 29, 2026Urban Air Mobility (UAM) has emerged as a transformative solution to alleviate urban congestion by utilizing low-altitude airspace, thereby reducing pressure on ground transportation networks. To enable truly efficient and seamless door-to-door travel experiences, UAM requires close integration with existing ground transportation infrastructure. However, current research on optimal integrated routing strategies for passengers in air-ground mobility systems remains limited, with a lack of systematic exploration.To address this gap, we first propose a unified optimization model that integrates strategy selection for both air and ground transportation. This model captures the dynamic characteristics of multimodal transport networks and incorporates real-time traffic conditions alongside passenger decision-making behavior. Building on this model, we propose a Unified Air-Ground Mobility Coordination (UAGMC) framework, which leverages deep reinforcement learning (RL) and Vehicle-to-Everything (V2X) communication to optimize vertiport selection and dynamically plan air taxi routes. Experimental results demonstrate that UAGMC achieves a 34\% reduction in average travel time compared to conventional proportional allocation methods, enhancing overall travel efficiency and providing novel insights into the integration and optimization of multimodal transportation systems. This work lays a solid foundation for advancing intelligent urban mobility solutions through the coordination of air and ground transportation modes. The related code can be found at https://github.com/Traffic-Alpha/UAGMC.
Anti-Intercept OFDM Waveform Design with Secure Coding for Satellite Networks
Apr 30, 2025Low Earth Orbit (LEO) satellite networks are integral to next-generation communication systems, providing global coverage, low latency, and minimal signal loss. However, their unique characteristics, such as constrained onboard resources, Line-of-Sight (LoS) propagation, and vulnerability to eavesdropping over wide coverage areas, present significant challenges to physical layer security. To address these challenges, this paper focuses on the design of anti-intercept waveforms for satellite-ground links within Orthogonal Frequency Division Multiplexing (OFDM) systems, aiming to enhance security against eavesdropping threats. We formulate a secrecy rate maximization problem that aims to balance secrecy performance and communication reliability under eavesdropping constraints and sub-carrier power limitations. To solve this non-convex optimization problem, we propose a bisection search-activated neural network (BSA-Net) that integrates unsupervised learning for secure coding optimization and bisection search for dynamic power allocation. The proposed method is structured in two stages: the first optimizes secure coding under power constraints, while the second allocates power across sub-carriers under eavesdropping constraints. Extensive simulation results demonstrate the efficacy of our approach, showcasing significant improvements in secrecy rate performance.
Knowledge-Driven Deep Learning Paradigms for Wireless Network Optimization in 6G
Jan 15, 2024



In the sixth-generation (6G) networks, newly emerging diversified services of massive users in dynamic network environments are required to be satisfied by multi-dimensional heterogeneous resources. The resulting large-scale complicated network optimization problems are beyond the capability of model-based theoretical methods due to the overwhelming computational complexity and the long processing time. Although with fast online inference and universal approximation ability, data-driven deep learning (DL) heavily relies on abundant training data and lacks interpretability. To address these issues, a new paradigm called knowledge-driven DL has emerged, aiming to integrate proven domain knowledge into the construction of neural networks, thereby exploiting the strengths of both methods. This article provides a systematic review of knowledge-driven DL in wireless networks. Specifically, a holistic framework of knowledge-driven DL in wireless networks is proposed, where knowledge sources, knowledge representation, knowledge integration and knowledge application are forming as a closed loop. Then, a detailed taxonomy of knowledge integration approaches, including knowledge-assisted, knowledge-fused, and knowledge-embedded DL, is presented. Several open issues for future research are also discussed. The insights offered in this article provide a basic principle for the design of network optimization that incorporates communication-specific domain knowledge and DL, facilitating the realization of intelligent 6G networks.
Asynchronous Wireless Federated Learning with Probabilistic Client Selection
Nov 28, 2023



Federated learning (FL) is a promising distributed learning framework where distributed clients collaboratively train a machine learning model coordinated by a server. To tackle the stragglers issue in asynchronous FL, we consider that each client keeps local updates and probabilistically transmits the local model to the server at arbitrary times. We first derive the (approximate) expression for the convergence rate based on the probabilistic client selection. Then, an optimization problem is formulated to trade off the convergence rate of asynchronous FL and mobile energy consumption by joint probabilistic client selection and bandwidth allocation. We develop an iterative algorithm to solve the non-convex problem globally optimally. Experiments demonstrate the superiority of the proposed approach compared with the traditional schemes.
Performance Analysis of RIS-Aided Double Spatial Scattering Modulation for mmWave MIMO Systems
Oct 08, 2023
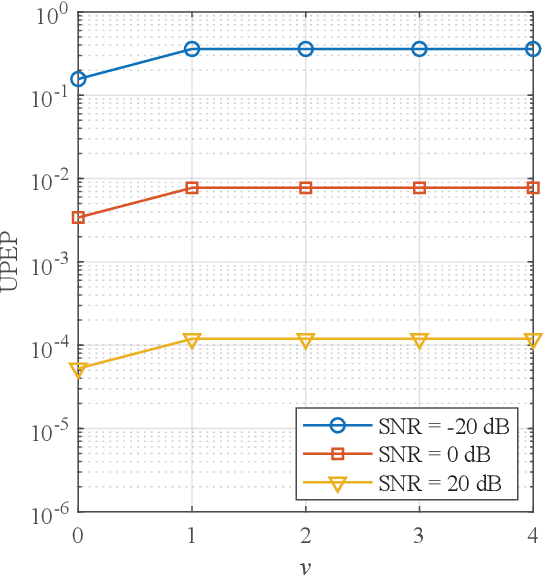

In this paper, we investigate a practical structure of reconfigurable intelligent surface (RIS)-based double spatial scattering modulation (DSSM) for millimeter-wave (mmWave) multiple-input multiple-output (MIMO) systems. A suboptimal detector is proposed, in which the beam direction is first demodulated according to the received beam strength, and then the remaining information is demodulated by adopting the maximum likelihood algorithm. Based on the proposed suboptimal detector, we derive the conditional pairwise error probability expression. Further, the exact numerical integral and closed-form expressions of unconditional pairwise error probability (UPEP) are derived via two different approaches. To provide more insights, we derive the upper bound and asymptotic expressions of UPEP. In addition, the diversity gain of the RIS-DSSM scheme was also given. Furthermore, the union upper bound of average bit error probability (ABEP) is obtained by combining the UPEP and the number of error bits. Simulation results are provided to validate the derived upper bound and asymptotic expressions of ABEP. We found an interesting phenomenon that the ABEP performance of the proposed system-based phase shift keying is better than that of the quadrature amplitude modulation. Additionally, the performance advantage of ABEP is more significant with the increase in the number of RIS elements.
Knowledge-Driven Multi-Agent Reinforcement Learning for Computation Offloading in Cybertwin-Enabled Internet of Vehicles
Aug 04, 2023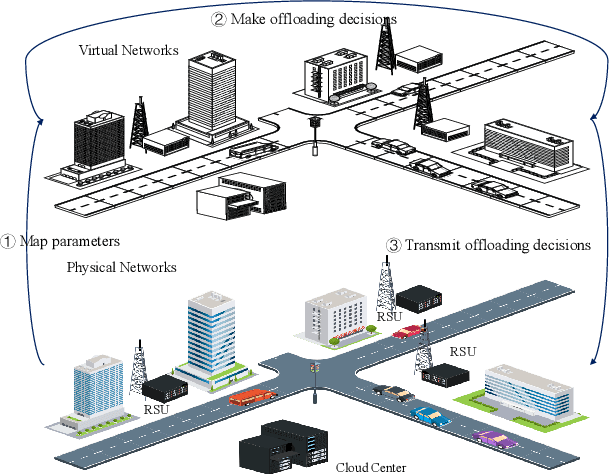
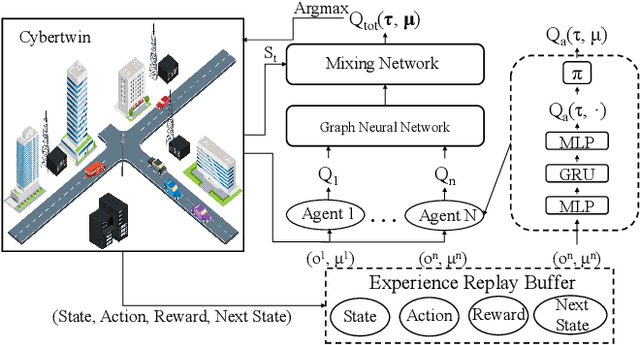
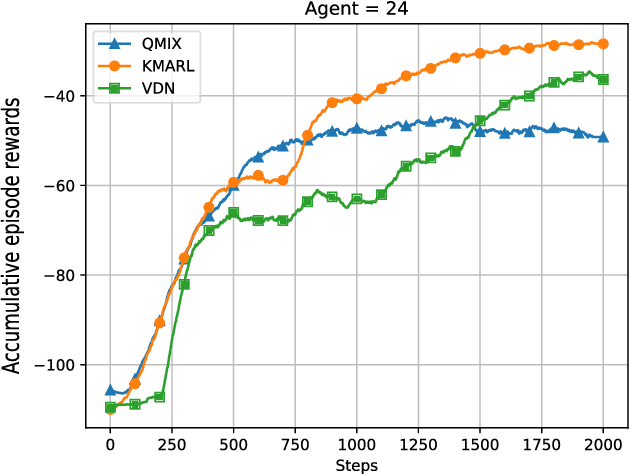

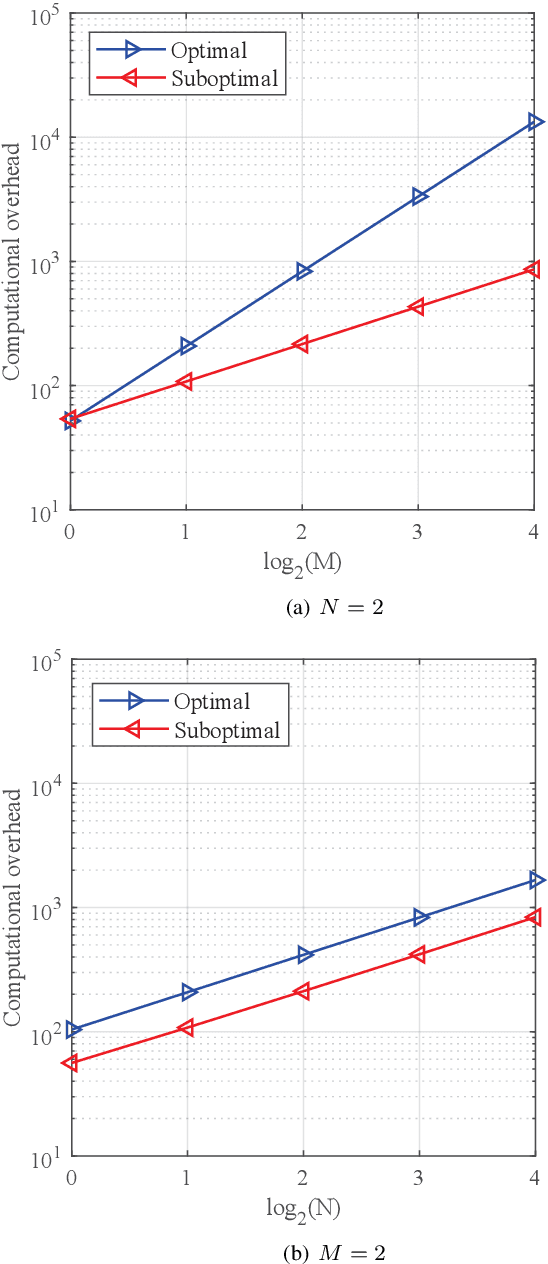
By offloading computation-intensive tasks of vehicles to roadside units (RSUs), mobile edge computing (MEC) in the Internet of Vehicles (IoV) can relieve the onboard computation burden. However, existing model-based task offloading methods suffer from heavy computational complexity with the increase of vehicles and data-driven methods lack interpretability. To address these challenges, in this paper, we propose a knowledge-driven multi-agent reinforcement learning (KMARL) approach to reduce the latency of task offloading in cybertwin-enabled IoV. Specifically, in the considered scenario, the cybertwin serves as a communication agent for each vehicle to exchange information and make offloading decisions in the virtual space. To reduce the latency of task offloading, a KMARL approach is proposed to select the optimal offloading option for each vehicle, where graph neural networks are employed by leveraging domain knowledge concerning graph-structure communication topology and permutation invariance into neural networks. Numerical results show that our proposed KMARL yields higher rewards and demonstrates improved scalability compared with other methods, benefitting from the integration of domain knowledge.
Robust Weighted Sum-Rate Maximization for Transmissive RIS Transmitter Enabled RSMA Networks
Jul 23, 2023Due to the low power consumption and low cost nature of transmissive reconfigurable intelligent surface (RIS),in this paper, we propose a downlink multi-user rate-splitting multiple access (RSMA) architecture based on the transmissive RIS transmitter, where the channel state information (CSI) is only accquired partially. We investigate the weighted sum-rate maximization problem by jointly optimizing the power, RIS transmissive coefficients and common rate allocated to each user. Due to the coupling of optimization variables, the problem is nonconvex, and it is difficult to directly obtain the optimal solution. Hence, a block coordinate descent (BCD) algorithm based on sample average approximation (SAA) and weighted minimum mean square error (WMMSE) is proposed to tackle it. Numerical results illustrate that the transmissive RIS transmitter with ratesplitting architecture has advantages over conventional space division multiple access (SDMA) and non-orthgonal multiple access (NOMA).
Vehicle Trajectory Tracking Through Magnetic Sensors
Sep 09, 2022
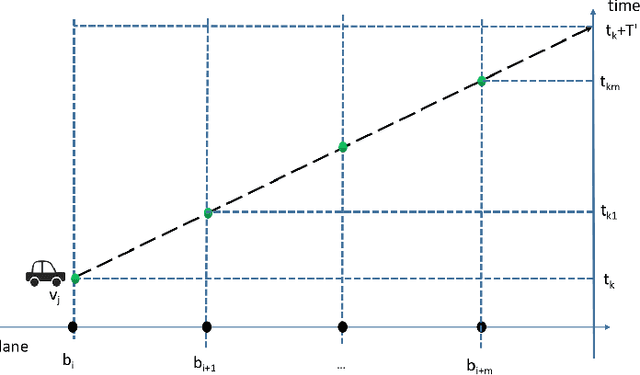
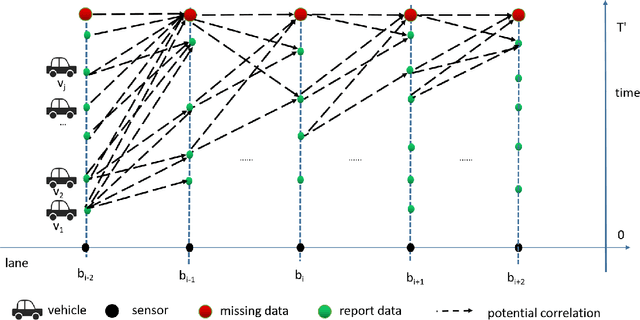

Traffic surveillance is an important issue in Intelligent Transportation Systems(ITS). In this paper, we propose a novel surveillance system to detect and track vehicles using ubiquitously deployed magnetic sensors. That is, multiple magnetic sensors, mounted roadside and along lane boundary lines, are used to track various vehicles. Real-time vehicle detection data are reported from magnetic sensors, collected into data center via base stations, and processed to depict vehicle trajectories including vehicle position, timestamp, speed and type. We first define a vehicle trajectory tracking problem. We then propose a graph-based data association algorithm to track each detected vehicle, and design a related online algorithm framework respectively. We finally validate the performance via both experimental simulation and real-world road test. The experimental results demonstrate that the proposed solution provides a cost-effective solution to capture the driving status of vehicles and on that basis form various traffic safety and efficiency applications.
Collaborative Driving: Learning- Aided Joint Topology Formulation and Beamforming
Mar 18, 2022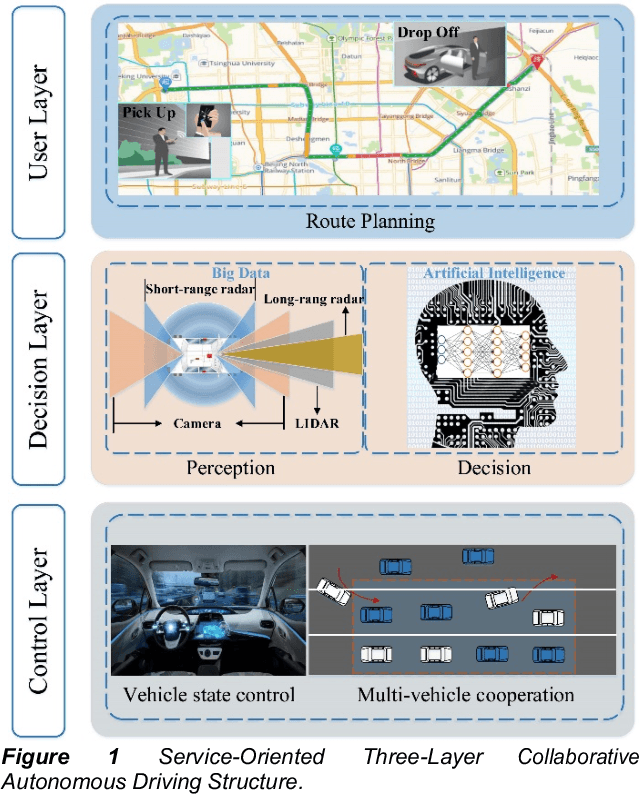
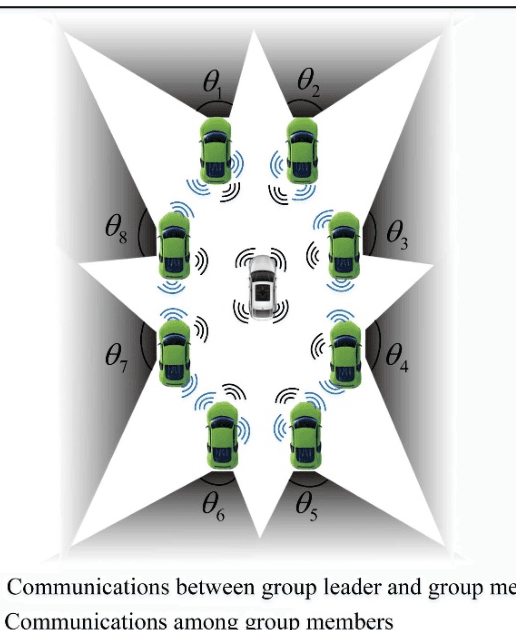
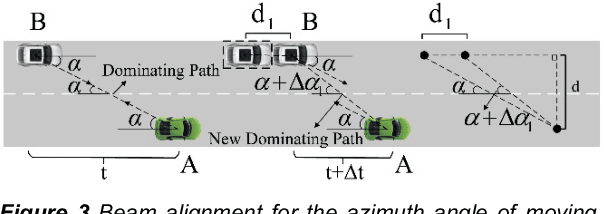
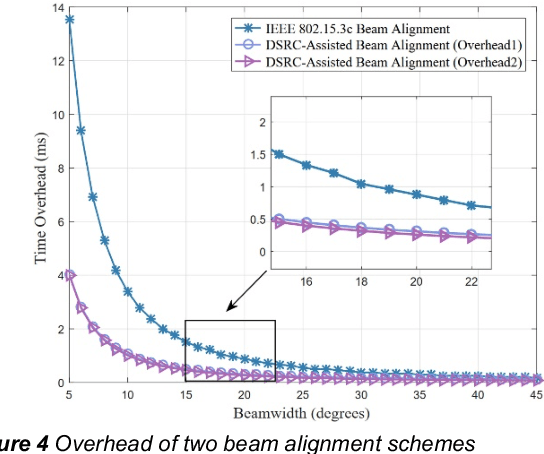
Currently, autonomous vehicles are able to drive more naturally based on the driving policies learned from millions of driving miles in real environments. However, to further improve the automation level of vehicles is a challenging task, especially in the case of multi-vehicle cooperation. In recent heated discussions of 6G, millimeter-wave (mmWave) and terahertz (THz) bands are deemed to play important roles in new radio communication architectures and algorithms. To enable reliable autonomous driving in 6G, in this paper, we envision collaborative autonomous driving, a new framework that jointly controls driving topology and formulate vehicular networks in the mmWave/THz bands. As a swarm intelligence system, the collaborative driving scheme goes beyond existing autonomous driving patterns based on single-vehicle intelligence in terms of safety and efficiency. With efficient data sharing, the proposed framework is able to achieve cooperative sensing and load balancing so that improve sensing efficiency with saved computational resources. To deal with the new challenges in the collaborative driving framework, we further illustrate two promising approaches for mmWave/THz-based vehicle-to-vehicle (V2V) communications. Finally, we discuss several potential open research problems for the proposed collaborative driving scheme.
Resource Scheduling in Edge Computing: A Survey
Aug 18, 2021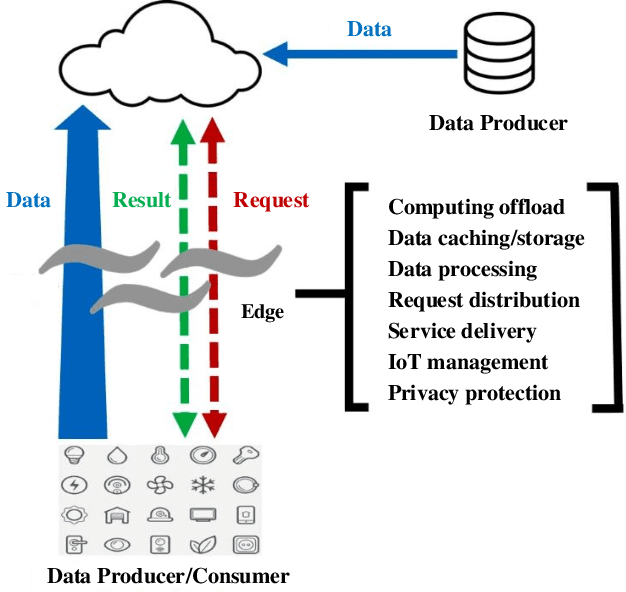
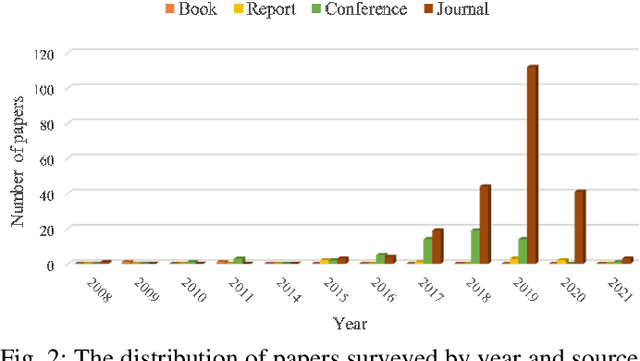
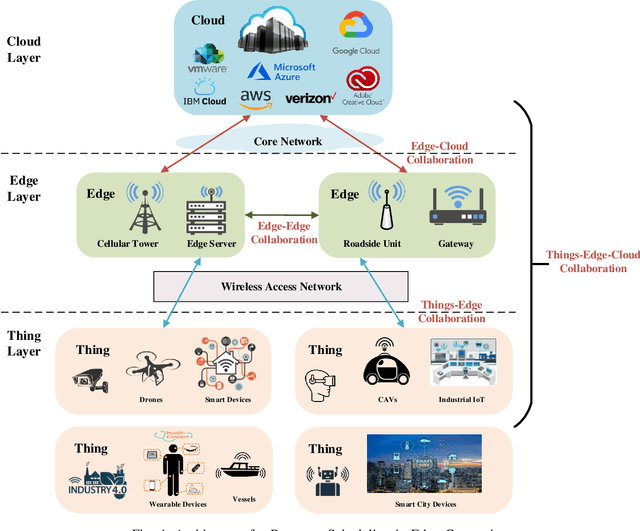
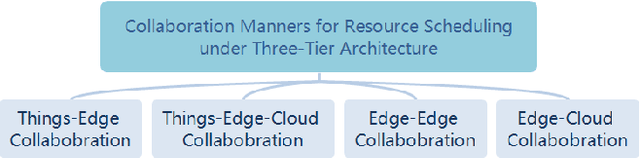
With the proliferation of the Internet of Things (IoT) and the wide penetration of wireless networks, the surging demand for data communications and computing calls for the emerging edge computing paradigm. By moving the services and functions located in the cloud to the proximity of users, edge computing can provide powerful communication, storage, networking, and communication capacity. The resource scheduling in edge computing, which is the key to the success of edge computing systems, has attracted increasing research interests. In this paper, we survey the state-of-the-art research findings to know the research progress in this field. Specifically, we present the architecture of edge computing, under which different collaborative manners for resource scheduling are discussed. Particularly, we introduce a unified model before summarizing the current works on resource scheduling from three research issues, including computation offloading, resource allocation, and resource provisioning. Based on two modes of operation, i.e., centralized and distributed modes, different techniques for resource scheduling are discussed and compared. Also, we summarize the main performance indicators based on the surveyed literature. To shed light on the significance of resource scheduling in real-world scenarios, we discuss several typical application scenarios involved in the research of resource scheduling in edge computing. Finally, we highlight some open research challenges yet to be addressed and outline several open issues as the future research direction.