 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReal2Sim: A Physics-driven and Editable Gaussian Splatting Framework for Autonomous Driving Scenes
May 13, 2026Reliable autonomous driving relies on large-scale, well-labeled data and robust models. However, manual data collection is resource-intensive, and traditional simulation suffers from a persistent reality gap. While recent generative frameworks and radiance-field methods improve visual fidelity, they still struggle with temporal and spatial consistency and cannot ensure physics-aware behavior, limiting their applicability to driving scenario generation. To address these challenges, we propose Real2Sim, an unified framework that combines 4D Gaussian Splatting (4DGS) with a differentiable Material Point Method (MPM) solver. Real2Sim explicitly reconstructs dynamic driving scenes as temporally continuous Gaussian primitives, supports instance-level editing, and simulates realistic object-object and object-environment interactions. This framework enables physics-aware, high-fidelity synthesis of diverse, editable scenarios, including challenging corner cases such as collisions and post-impact trajectories. Experiments on the Waymo Open Dataset validate Real2Sim's capabilities in rendering, reconstruction, editing, and physics simulation, demonstrating its potential as a scalable tool for data generation in downstream tasks such as perception, tracking, trajectory prediction, and end-to-end policy learning.
Enhancing Predictability of Multi-Tenant DNN Inference for Autonomous Vehicles' Perception
Feb 11, 2026Autonomous vehicles (AVs) rely on sensors and deep neural networks (DNNs) to perceive their surrounding environment and make maneuver decisions in real time. However, achieving real-time DNN inference in the AV's perception pipeline is challenging due to the large gap between the computation requirement and the AV's limited resources. Most, if not all, of existing studies focus on optimizing the DNN inference time to achieve faster perception by compressing the DNN model with pruning and quantization. In contrast, we present a Predictable Perception system with DNNs (PP-DNN) that reduce the amount of image data to be processed while maintaining the same level of accuracy for multi-tenant DNNs by dynamically selecting critical frames and regions of interest (ROIs). PP-DNN is based on our key insight that critical frames and ROIs for AVs vary with the AV's surrounding environment. However, it is challenging to identify and use critical frames and ROIs in multi-tenant DNNs for predictable inference. Given image-frame streams, PP-DNN leverages an ROI generator to identify critical frames and ROIs based on the similarities of consecutive frames and traffic scenarios. PP-DNN then leverages a FLOPs predictor to predict multiply-accumulate operations (MACs) from the dynamic critical frames and ROIs. The ROI scheduler coordinates the processing of critical frames and ROIs with multiple DNN models. Finally, we design a detection predictor for the perception of non-critical frames. We have implemented PP-DNN in an ROS-based AV pipeline and evaluated it with the BDD100K and the nuScenes dataset. PP-DNN is observed to significantly enhance perception predictability, increasing the number of fusion frames by up to 7.3x, reducing the fusion delay by >2.6x and fusion-delay variations by >2.3x, improving detection completeness by 75.4% and the cost-effectiveness by up to 98% over the baseline.
DAVOS: An Autonomous Vehicle Operating System in the Vehicle Computing Era
Jan 08, 2026Vehicle computing represents a fundamental shift in how autonomous vehicles are designed and deployed, transforming them from isolated transportation systems into mobile computing platforms that support both safety-critical, real-time driving and data-centric services. In this setting, vehicles simultaneously support real-time driving pipelines and a growing set of data-driven applications, placing increased responsibility on the vehicle operating system to coordinate computation, data movement, storage, and access. These demands highlight recurring system considerations related to predictable execution, data and execution protection, efficient handling of high-rate sensor data, and long-term system evolvability, commonly summarized as Safety, Security, Efficiency, and Extensibility (SSEE). Existing vehicle operating systems and runtimes address these concerns in isolation, resulting in fragmented software stacks that limit coordination between autonomy workloads and vehicle data services. This paper presents DAVOS, the Delaware Autonomous Vehicle Operating System, a unified vehicle operating system architecture designed for the vehicle computing context. DAVOS provides a cohesive operating system foundation that supports both real-time autonomy and extensible vehicle computing within a single system framework.
CARScenes: Semantic VLM Dataset for Safe Autonomous Driving
Nov 18, 2025CAR-Scenes is a frame-level dataset for autonomous driving that enables training and evaluation of vision-language models (VLMs) for interpretable, scene-level understanding. We annotate 5,192 images drawn from Argoverse 1, Cityscapes, KITTI, and nuScenes using a 28-key category/sub-category knowledge base covering environment, road geometry, background-vehicle behavior, ego-vehicle behavior, vulnerable road users, sensor states, and a discrete severity scale (1-10), totaling 350+ leaf attributes. Labels are produced by a GPT-4o-assisted vision-language pipeline with human-in-the-loop verification; we release the exact prompts, post-processing rules, and per-field baseline model performance. CAR-Scenes also provides attribute co-occurrence graphs and JSONL records that support semantic retrieval, dataset triage, and risk-aware scenario mining across sources. To calibrate task difficulty, we include reproducible, non-benchmark baselines, notably a LoRA-tuned Qwen2-VL-2B with deterministic decoding, evaluated via scalar accuracy, micro-averaged F1 for list attributes, and severity MAE/RMSE on a fixed validation split. We publicly release the annotation and analysis scripts, including graph construction and evaluation scripts, to enable explainable, data-centric workflows for future intelligent vehicles. Dataset: https://github.com/Croquembouche/CAR-Scenes
EMATO: Energy-Model-Aware Trajectory Optimization for Autonomous Driving
Dec 12, 2024Autonomous driving lacks strong proof of energy efficiency with the energy-model-agnostic trajectory planning. To achieve an energy consumption model-aware trajectory planning for autonomous driving, this study proposes an online nonlinear programming method that optimizes the polynomial trajectories generated by the Frenet polynomial method while considering both traffic trajectories and road slope prediction. This study further investigates how the energy model can be leveraged in different driving conditions to achieve higher energy efficiency. Case studies, quantitative studies, and ablation studies are conducted in a sedan and truck model to prove the effectiveness of the method.
Slope Considered Online Nonlinear Trajectory Planning with Differential Energy Model for Autonomous Driving
Dec 12, 2024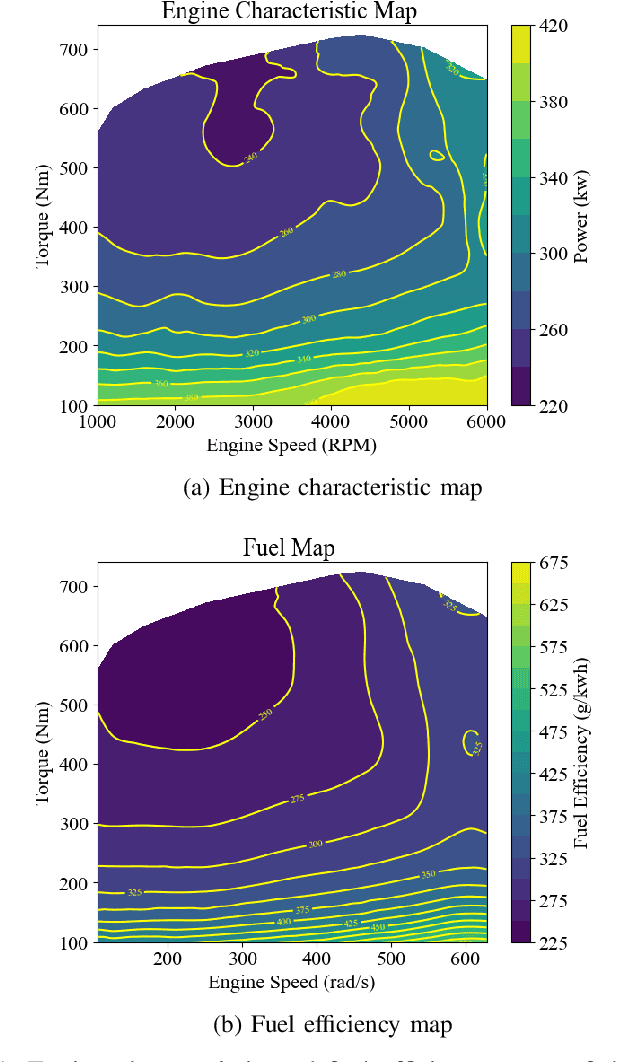
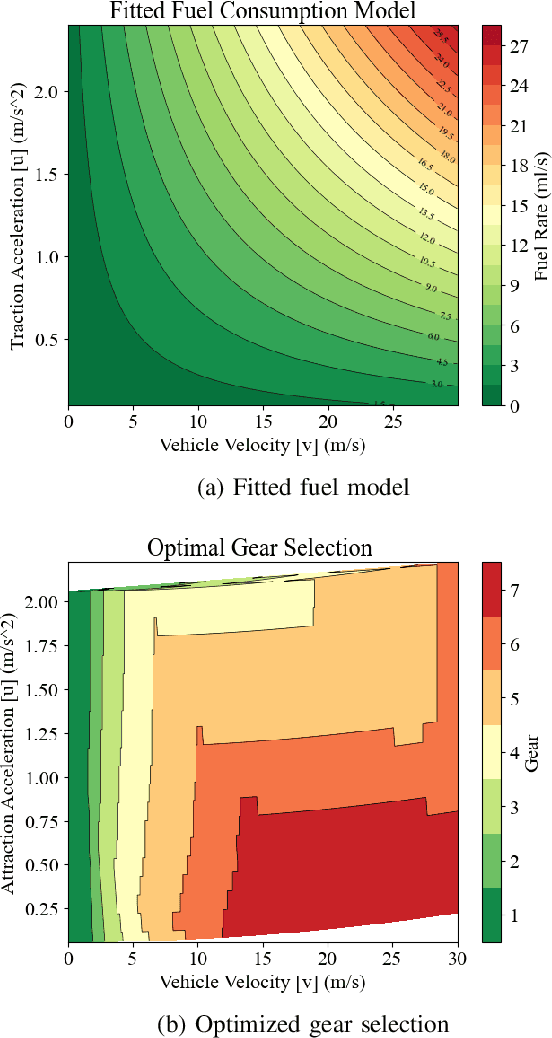
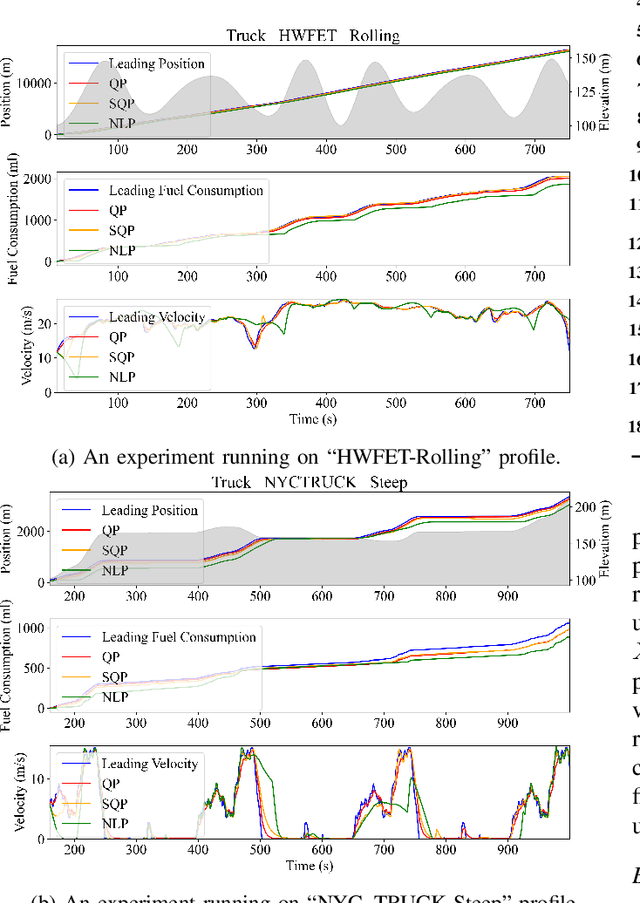
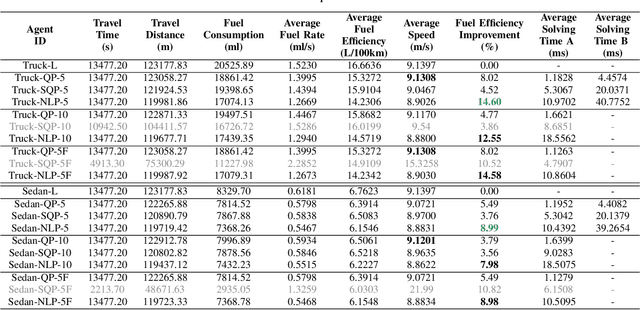
Achieving energy-efficient trajectory planning for autonomous driving remains a challenge due to the limitations of model-agnostic approaches. This study addresses this gap by introducing an online nonlinear programming trajectory optimization framework that integrates a differentiable energy model into autonomous systems. By leveraging traffic and slope profile predictions within a safety-critical framework, the proposed method enhances fuel efficiency for both sedans and diesel trucks by 3.71\% and 7.15\%, respectively, when compared to traditional model-agnostic quadratic programming techniques. These improvements translate to a potential \$6.14 billion economic benefit for the U.S. trucking industry. This work bridges the gap between model-agnostic autonomous driving and model-aware ECO-driving, highlighting a practical pathway for integrating energy efficiency into real-time trajectory planning.
An Advanced Framework for Ultra-Realistic Simulation and Digital Twinning for Autonomous Vehicles
May 02, 2024



Simulation is a fundamental tool in developing autonomous vehicles, enabling rigorous testing without the logistical and safety challenges associated with real-world trials. As autonomous vehicle technologies evolve and public safety demands increase, advanced, realistic simulation frameworks are critical. Current testing paradigms employ a mix of general-purpose and specialized simulators, such as CARLA and IVRESS, to achieve high-fidelity results. However, these tools often struggle with compatibility due to differing platform, hardware, and software requirements, severely hampering their combined effectiveness. This paper introduces BlueICE, an advanced framework for ultra-realistic simulation and digital twinning, to address these challenges. BlueICE's innovative architecture allows for the decoupling of computing platforms, hardware, and software dependencies while offering researchers customizable testing environments to meet diverse fidelity needs. Key features include containerization to ensure compatibility across different systems, a unified communication bridge for seamless integration of various simulation tools, and synchronized orchestration of input and output across simulators. This framework facilitates the development of sophisticated digital twins for autonomous vehicle testing and sets a new standard in simulation accuracy and flexibility. The paper further explores the application of BlueICE in two distinct case studies: the ICAT indoor testbed and the STAR campus outdoor testbed at the University of Delaware. These case studies demonstrate BlueICE's capability to create sophisticated digital twins for autonomous vehicle testing and underline its potential as a standardized testbed for future autonomous driving technologies.
ICAT: An Indoor Connected and Autonomous Testbed for Vehicle Computing
Mar 06, 2024



Indoor autonomous driving testbeds have emerged to complement expensive outdoor testbeds and virtual simulations, offering scalable and cost-effective solutions for research in navigation, traffic optimization, and swarm intelligence. However, they often lack the robust sensing and computing infrastructure for advanced research. Addressing these limitations, we introduce the Indoor Connected Autonomous Testbed (ICAT), a platform that not only tackles the unique challenges of indoor autonomous driving but also innovates vehicle computing and V2X communication. Moreover, ICAT leverages digital twins through CARLA and SUMO simulations, facilitating both centralized and decentralized autonomy deployments.
Autonomous Shuttle Operation for Vulnerable Populations: Lessons and Experiences
Feb 28, 2024
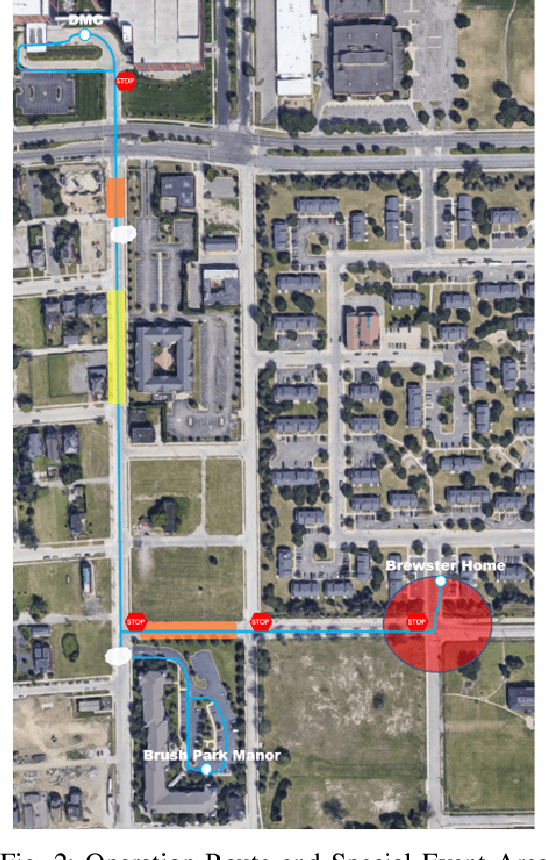
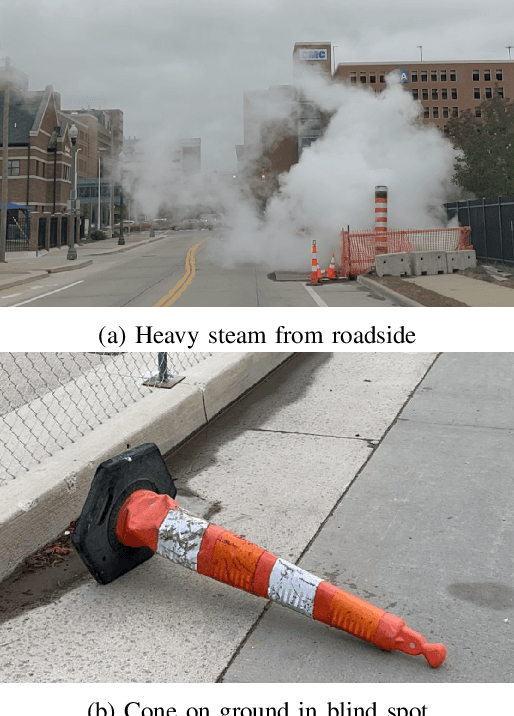
The increasing shortage of drivers poses a significant threat to vulnerable populations, particularly seniors and disabled individuals who heavily depend on public transportation for accessing healthcare services and social events. Autonomous Vehicles (AVs) emerge as a promising alternative, offering potential improvements in accessibility and independence for these groups. However, current designs and studies often overlook the unique needs and experiences of these populations, leading to potential accessibility barriers. This paper presents a detailed case study of an autonomous shuttle test specifically tailored for seniors and disabled individuals, conducted during the early stages of the COVID-19 pandemic. The service, which lasted 13 weeks, catered to approximately 1500 passengers in an urban setting, aiming to facilitate access to essential services. Drawing from the safety operator's experiences and direct observations, we identify critical user experience and safety challenges faced by vulnerable passengers. Based on our findings, we propose targeted initiatives to enhance the safety, accessibility, and user education of AV technology for seniors and disabled individuals. These include increasing educational opportunities to familiarize these groups with AV technology, designing AVs with a focus on diversity and inclusion, and improving training programs for AV operators to address the unique needs of vulnerable populations. Through these initiatives, we aim to bridge the gap in AV accessibility and ensure that these technologies benefit all members of society.
Direct Punjabi to English speech translation using discrete units
Feb 25, 2024



Speech-to-speech translation is yet to reach the same level of coverage as text-to-text translation systems. The current speech technology is highly limited in its coverage of over 7000 languages spoken worldwide, leaving more than half of the population deprived of such technology and shared experiences. With voice-assisted technology (such as social robots and speech-to-text apps) and auditory content (such as podcasts and lectures) on the rise, ensuring that the technology is available for all is more important than ever. Speech translation can play a vital role in mitigating technological disparity and creating a more inclusive society. With a motive to contribute towards speech translation research for low-resource languages, our work presents a direct speech-to-speech translation model for one of the Indic languages called Punjabi to English. Additionally, we explore the performance of using a discrete representation of speech called discrete acoustic units as input to the Transformer-based translation model. The model, abbreviated as Unit-to-Unit Translation (U2UT), takes a sequence of discrete units of the source language (the language being translated from) and outputs a sequence of discrete units of the target language (the language being translated to). Our results show that the U2UT model performs better than the Speech-to-Unit Translation (S2UT) model by a 3.69 BLEU score.