 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEMATO: Energy-Model-Aware Trajectory Optimization for Autonomous Driving
Dec 12, 2024Autonomous driving lacks strong proof of energy efficiency with the energy-model-agnostic trajectory planning. To achieve an energy consumption model-aware trajectory planning for autonomous driving, this study proposes an online nonlinear programming method that optimizes the polynomial trajectories generated by the Frenet polynomial method while considering both traffic trajectories and road slope prediction. This study further investigates how the energy model can be leveraged in different driving conditions to achieve higher energy efficiency. Case studies, quantitative studies, and ablation studies are conducted in a sedan and truck model to prove the effectiveness of the method.
Slope Considered Online Nonlinear Trajectory Planning with Differential Energy Model for Autonomous Driving
Dec 12, 2024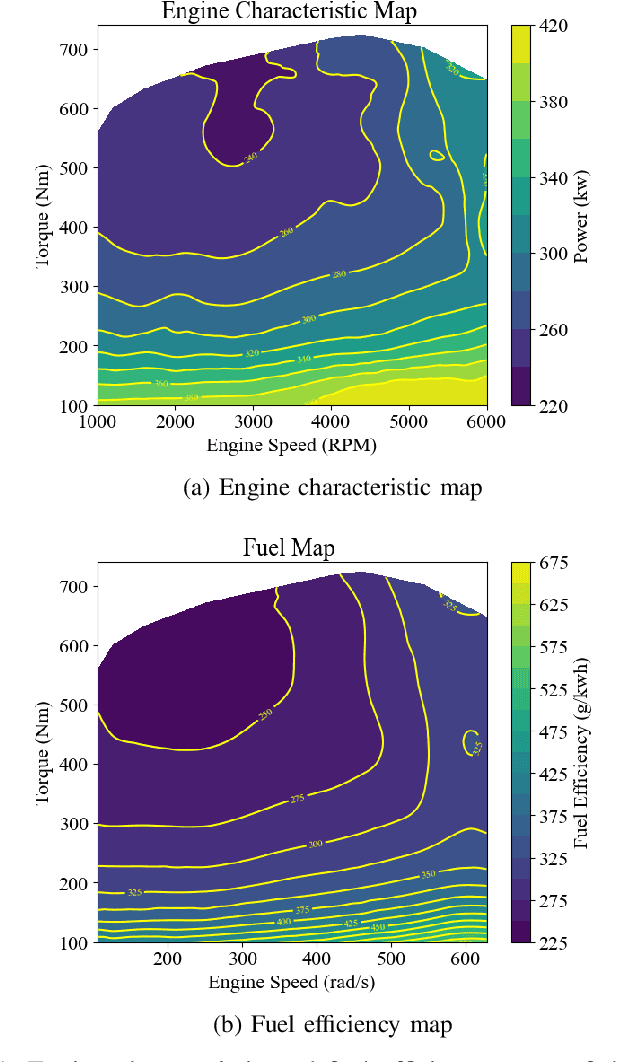
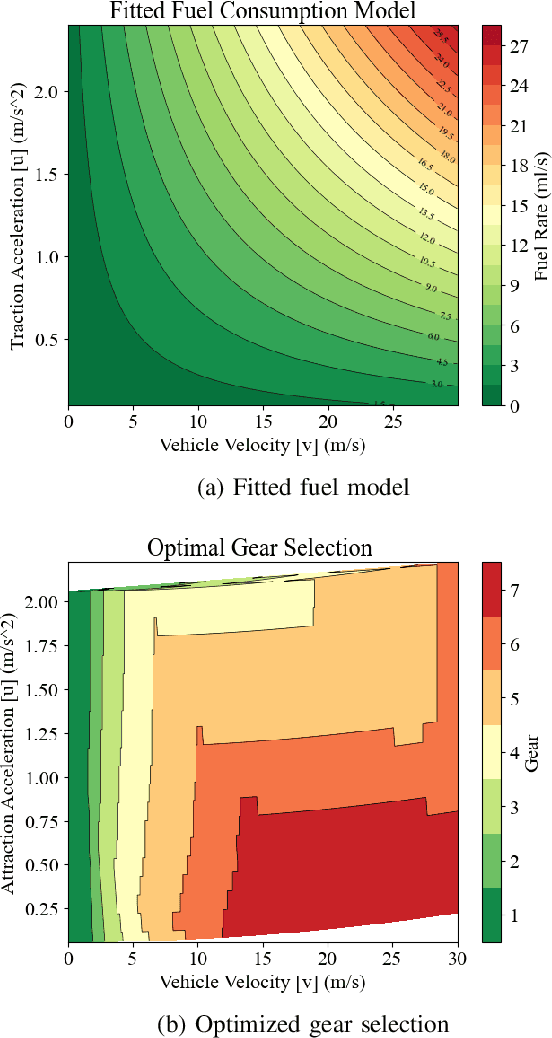
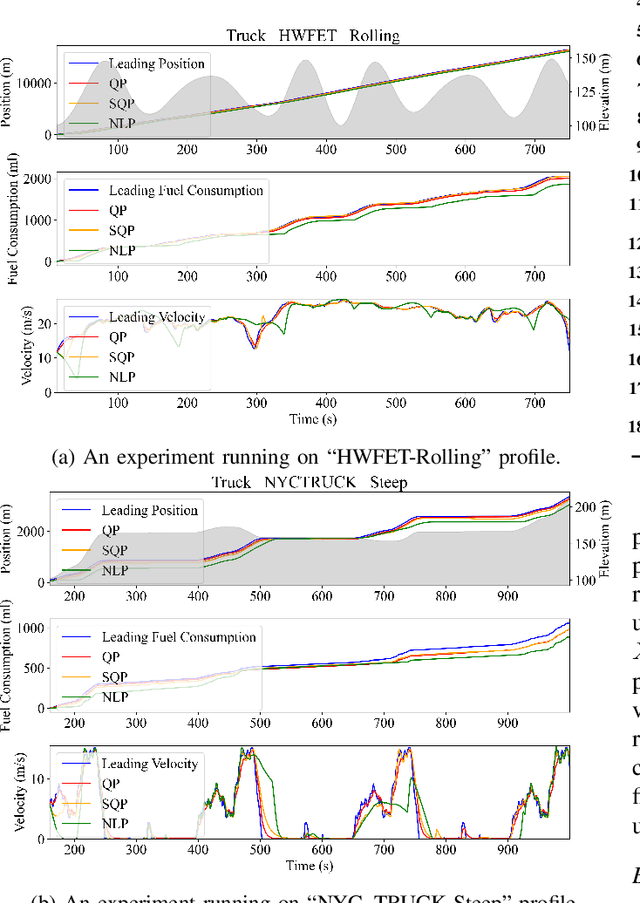
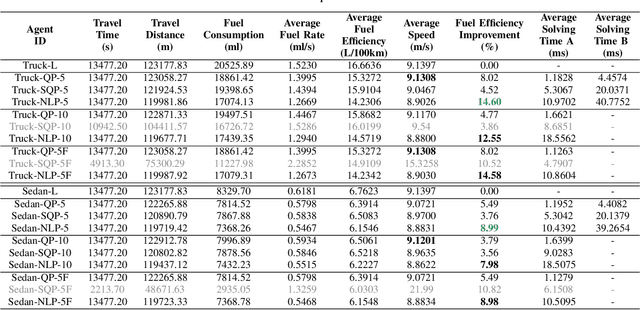
Achieving energy-efficient trajectory planning for autonomous driving remains a challenge due to the limitations of model-agnostic approaches. This study addresses this gap by introducing an online nonlinear programming trajectory optimization framework that integrates a differentiable energy model into autonomous systems. By leveraging traffic and slope profile predictions within a safety-critical framework, the proposed method enhances fuel efficiency for both sedans and diesel trucks by 3.71\% and 7.15\%, respectively, when compared to traditional model-agnostic quadratic programming techniques. These improvements translate to a potential \$6.14 billion economic benefit for the U.S. trucking industry. This work bridges the gap between model-agnostic autonomous driving and model-aware ECO-driving, highlighting a practical pathway for integrating energy efficiency into real-time trajectory planning.
ICAT: An Indoor Connected and Autonomous Testbed for Vehicle Computing
Mar 06, 2024



Indoor autonomous driving testbeds have emerged to complement expensive outdoor testbeds and virtual simulations, offering scalable and cost-effective solutions for research in navigation, traffic optimization, and swarm intelligence. However, they often lack the robust sensing and computing infrastructure for advanced research. Addressing these limitations, we introduce the Indoor Connected Autonomous Testbed (ICAT), a platform that not only tackles the unique challenges of indoor autonomous driving but also innovates vehicle computing and V2X communication. Moreover, ICAT leverages digital twins through CARLA and SUMO simulations, facilitating both centralized and decentralized autonomy deployments.
Autonomous Shuttle Operation for Vulnerable Populations: Lessons and Experiences
Feb 28, 2024
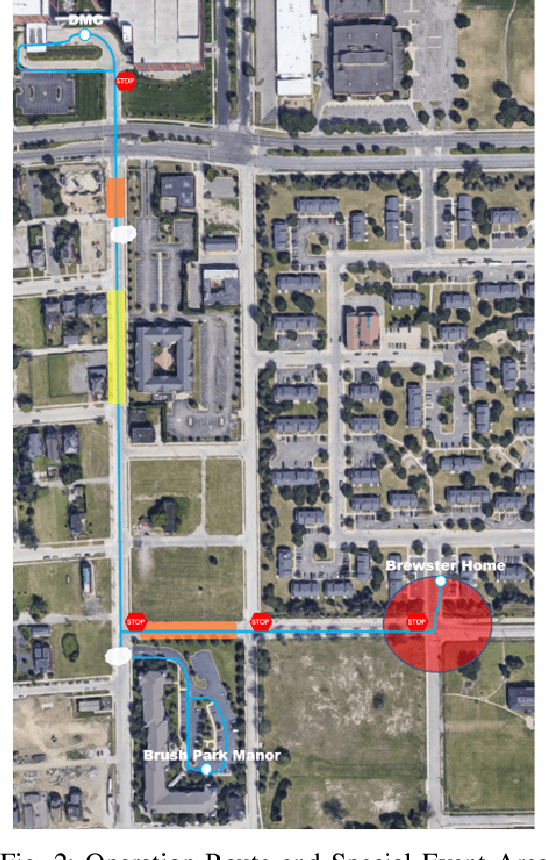
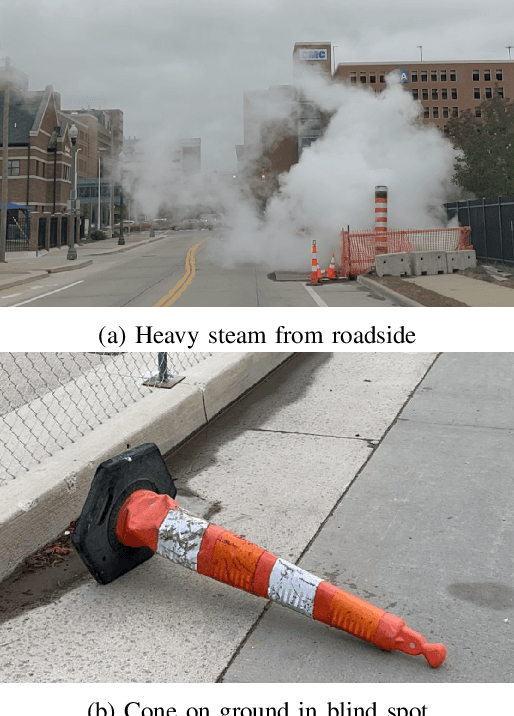
The increasing shortage of drivers poses a significant threat to vulnerable populations, particularly seniors and disabled individuals who heavily depend on public transportation for accessing healthcare services and social events. Autonomous Vehicles (AVs) emerge as a promising alternative, offering potential improvements in accessibility and independence for these groups. However, current designs and studies often overlook the unique needs and experiences of these populations, leading to potential accessibility barriers. This paper presents a detailed case study of an autonomous shuttle test specifically tailored for seniors and disabled individuals, conducted during the early stages of the COVID-19 pandemic. The service, which lasted 13 weeks, catered to approximately 1500 passengers in an urban setting, aiming to facilitate access to essential services. Drawing from the safety operator's experiences and direct observations, we identify critical user experience and safety challenges faced by vulnerable passengers. Based on our findings, we propose targeted initiatives to enhance the safety, accessibility, and user education of AV technology for seniors and disabled individuals. These include increasing educational opportunities to familiarize these groups with AV technology, designing AVs with a focus on diversity and inclusion, and improving training programs for AV operators to address the unique needs of vulnerable populations. Through these initiatives, we aim to bridge the gap in AV accessibility and ensure that these technologies benefit all members of society.
Reinforcement Learning for Self-exploration in Narrow Spaces
Sep 17, 2022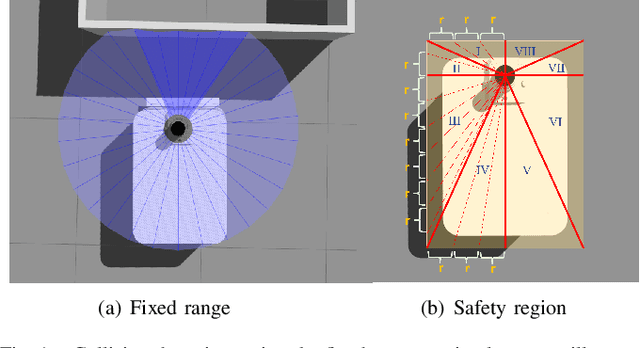
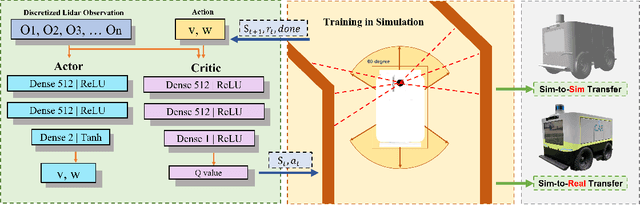
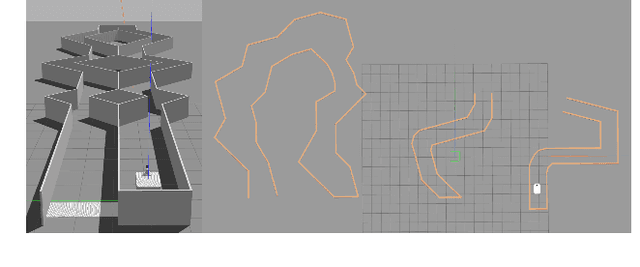
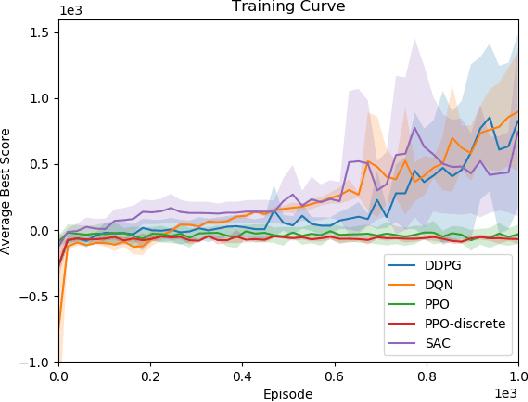
In narrow spaces, motion planning based on the traditional hierarchical autonomous system could cause collisions due to mapping, localization, and control noises. Additionally, it is disabled when mapless. To tackle these problems, we leverage deep reinforcement learning which is verified to be effective in self-decision-making, to self-explore in narrow spaces without a map while avoiding collisions. Specifically, based on our Ackermann-steering rectangular-shaped ZebraT robot and its Gazebo simulator, we propose the rectangular safety region to represent states and detect collisions for rectangular-shaped robots, and a carefully crafted reward function for reinforcement learning that does not require the destination information. Then we benchmark five reinforcement learning algorithms including DDPG, DQN, SAC, PPO, and PPO-discrete, in a simulated narrow track. After training, the well-performed DDPG and DQN models can be transferred to three brand new simulated tracks, and furthermore to three real-world tracks.
Edge Coverage Path Planning for Robot Mowing
Sep 12, 2022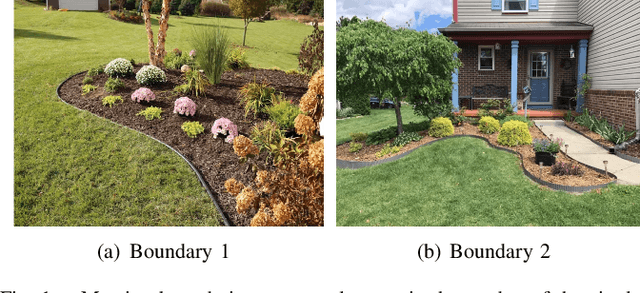
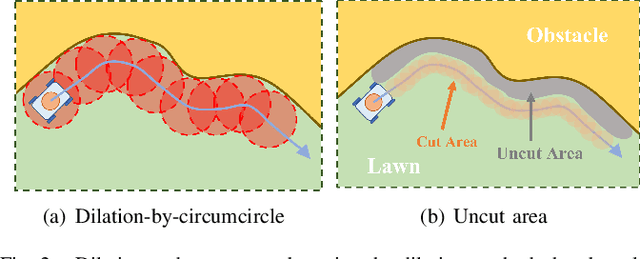
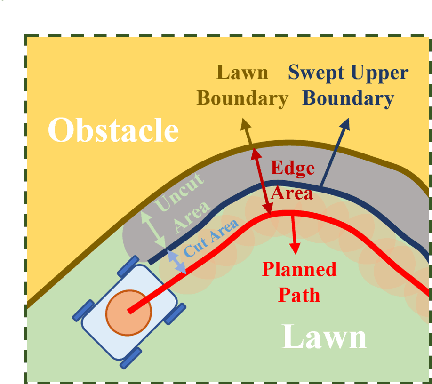
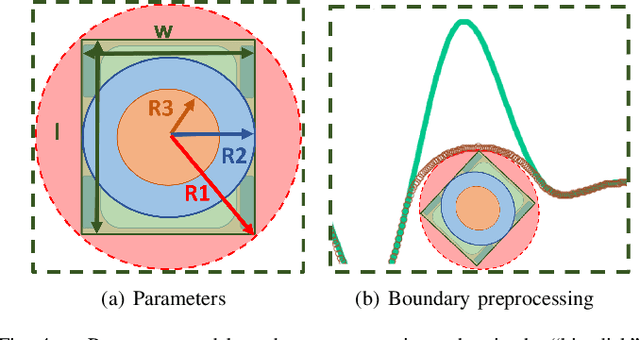
Thanks to the rapid evolvement of robotic technologies, robot mowing is emerging to liberate humans from the tedious and time-consuming landscape work. Traditionally, robot mowing is perceived as a "Coverage Path Planning" problem, with a simplification that converts non-convex obstacles into convex obstacles. Besides, the converted obstacles are commonly dilated by the robot's circumcircle for collision avoidance. However when applied to robot mowing, an obstacle in a lawn is usually non-convex, imagine a garden on the lawn, such that the mentioned obstacle processing methods would fill in some concave areas so that they are not accessible to the robot anymore and hence produce inescapable uncut areas along the lawn edge, which dulls the landscape's elegance and provokes rework. To shrink the uncut area around the lawn edge we hereby reframe the problem into a brand new problem, named the "Edge Coverage Path Planning" problem that is dedicated to path planning with the objective to cover the edge. Correspondingly, we propose two planning methods, the "big and small disk" and the "sliding chopstick" planning method to tackle the problem by leveraging image morphological processing and computational geometry skills. By validation, our proposed methods can outperform the traditional "dilation-by-circumcircle" method.
A Pulse-and-Glide-driven Adaptive Cruise Control System for Electric Vehicle
May 18, 2022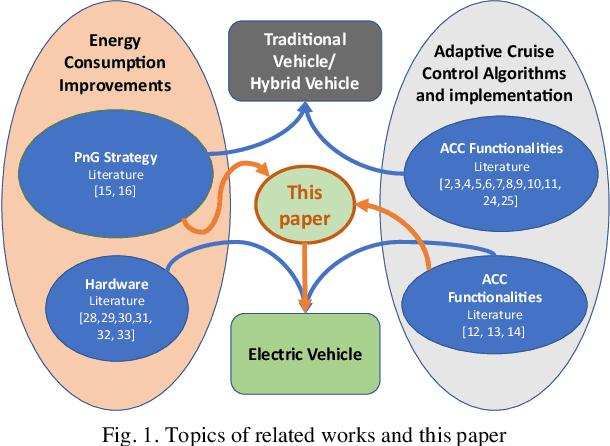
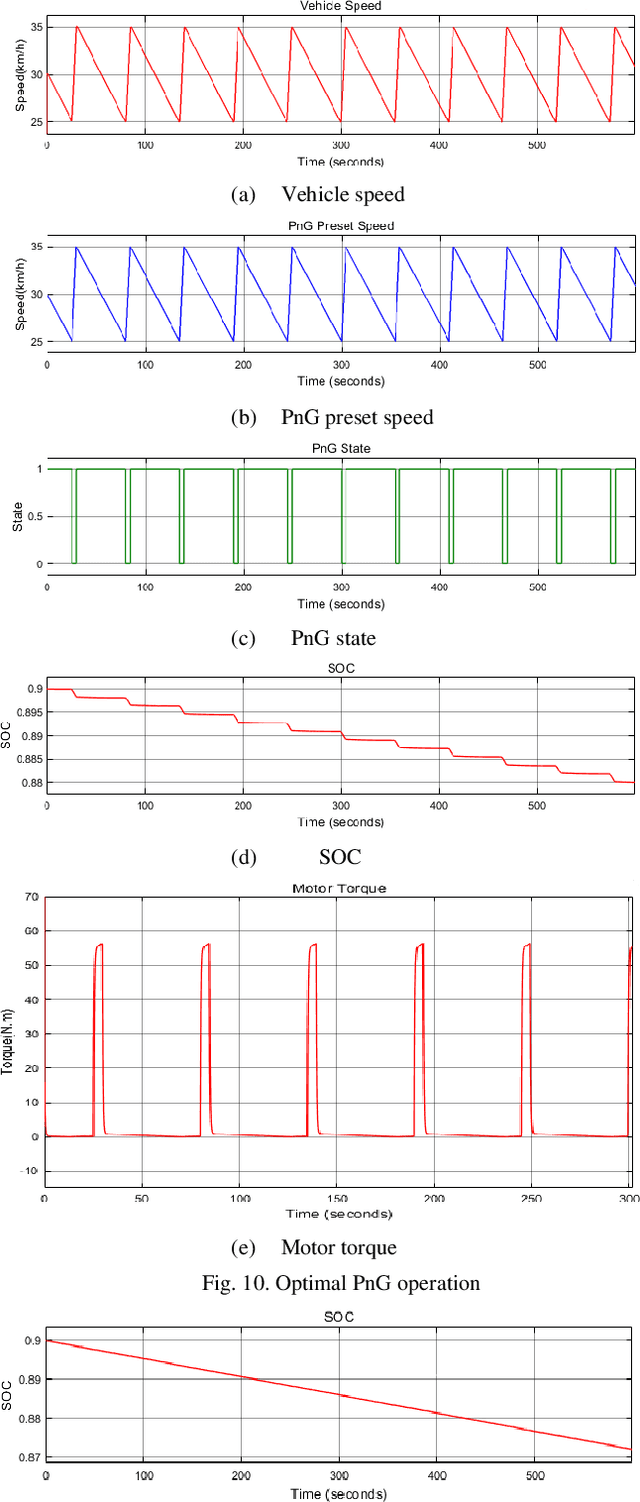
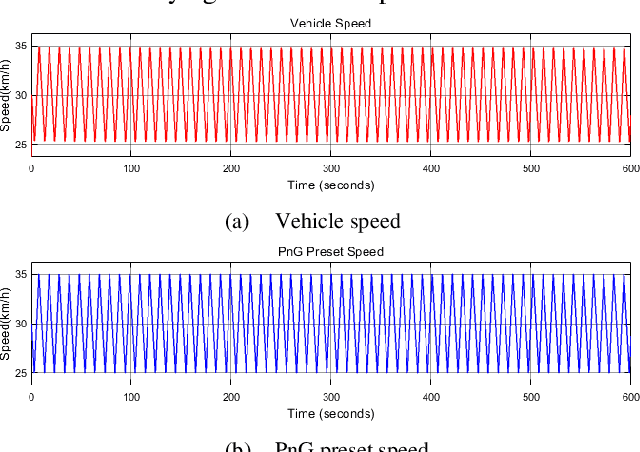
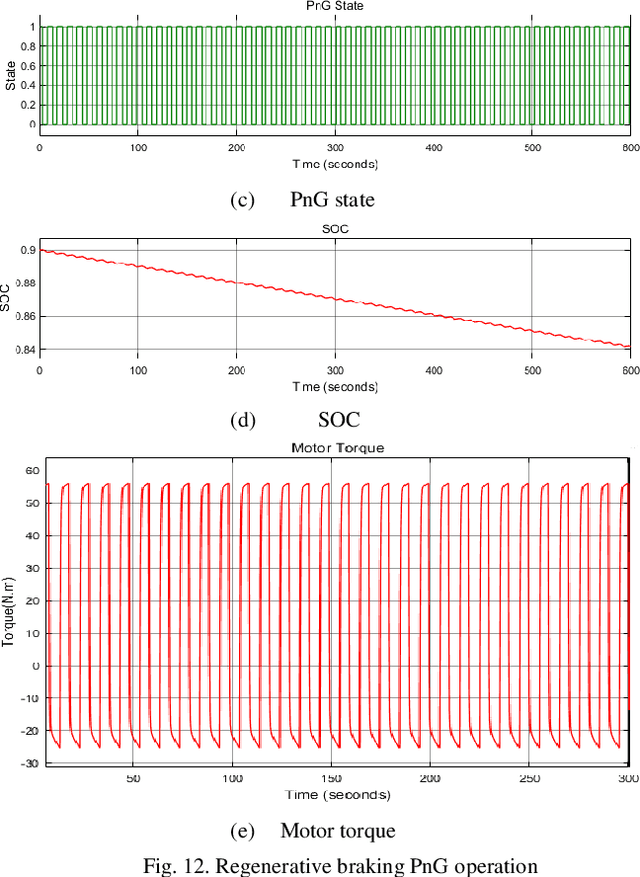
As the adaptive cruise control system (ACCS) on vehicles is well-developed today, vehicle manufacturers have increasingly employed this technology in new-generation intelligent vehicles. Pulse-and-glide (PnG) strategy is an efficacious driving strategy to diminish fuel consumption in traditional oil-fueled vehicles. However, current studies rarely focus on the verification of the energy-saving effect of PnG on an electric vehicle (EV) and embedding PnG in ACCS. This paper proposes a pulse-and-glide-driven adaptive cruise control system (PGACCS) model which leverages PnG strategy as a parallel function with cruise control (CC) and verifies that PnG is an efficacious energy-saving strategy on EV by optimizing the energy cost of the PnG operation using Intelligent Genetic Algorithm and Particle Swarm Optimization (IGPSO). This paper builds up a simulation model of an EV with regenerative braking and ACCS based on which the performance of PGACCS and regenerative braking is evaluated; the PnG energy performance is optimized and the effect of regenerative braking on PnG energy performance is evaluated. As a result of PnG optimization, the PnG operation in the PGACCS could cut down 28.3% energy cost of the EV compared to the CC operation in the traditional ACCS which verifies that PnG is an effective energy-saving strategy for EV and PGACCS is a promising option for EV.
Design and Implement an Enhanced Simulator for Autonomous Delivery Robot
May 16, 2022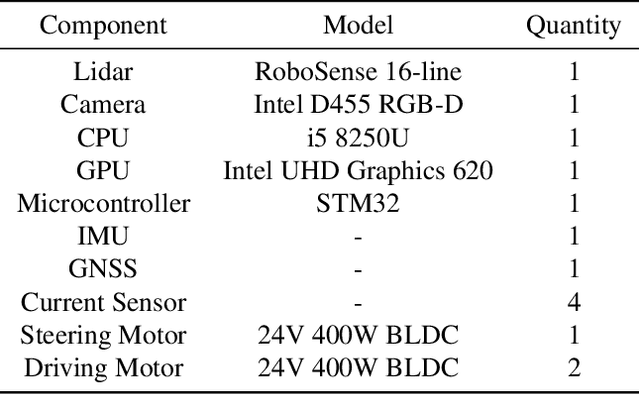
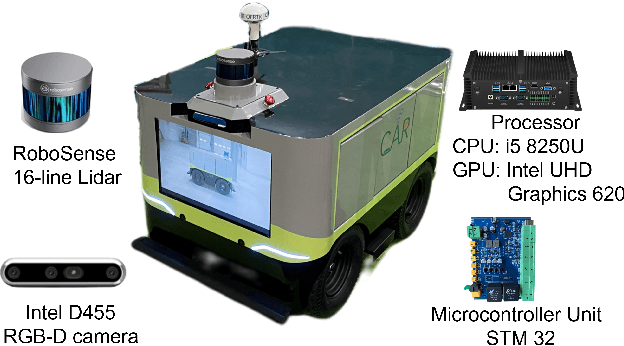

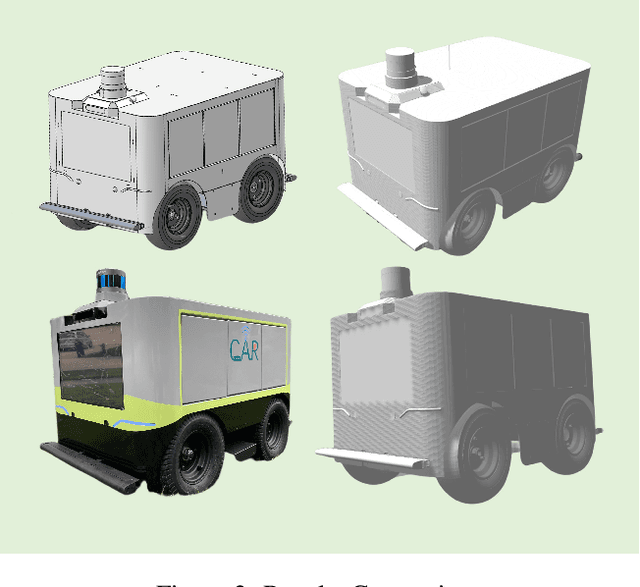
As autonomous driving technology is getting more and more mature today, autonomous delivery companies like Starship, Marble, and Nuro has been making progress in the tests of their autonomous delivery robots. While simulations and simulators are very important for the final product landing of the autonomous delivery robots since the autonomous delivery robots need to navigate on the sidewalk, campus, and other urban scenarios, where the simulations can avoid real damage to pedestrians and properties in the real world caused by any algorithm failures and programming errors and thus accelerate the whole developing procedure and cut down the cost. In this case, this study proposes an open-source simulator based on our autonomous delivery robot ZebraT to accelerate the research on autonomous delivery. The simulator developing procedure is illustrated step by step. What is more, the applications on the simulator that we are working on are also introduced, which includes autonomous navigation in the simulated urban environment, cooperation between an autonomous vehicle and an autonomous delivery robot, and reinforcement learning practice on the task training in the simulator. We have published the proposed simulator in Github.
A Survey on Simulators for Testing Self-Driving Cars
Jan 13, 2021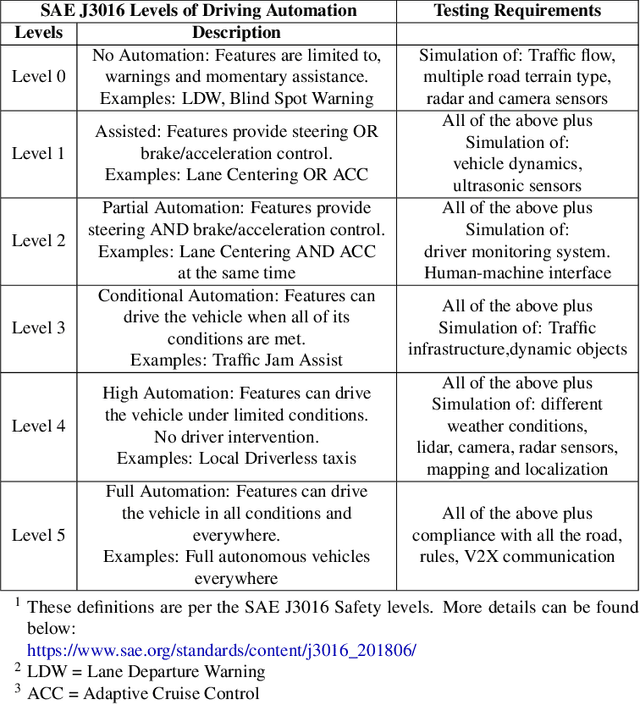
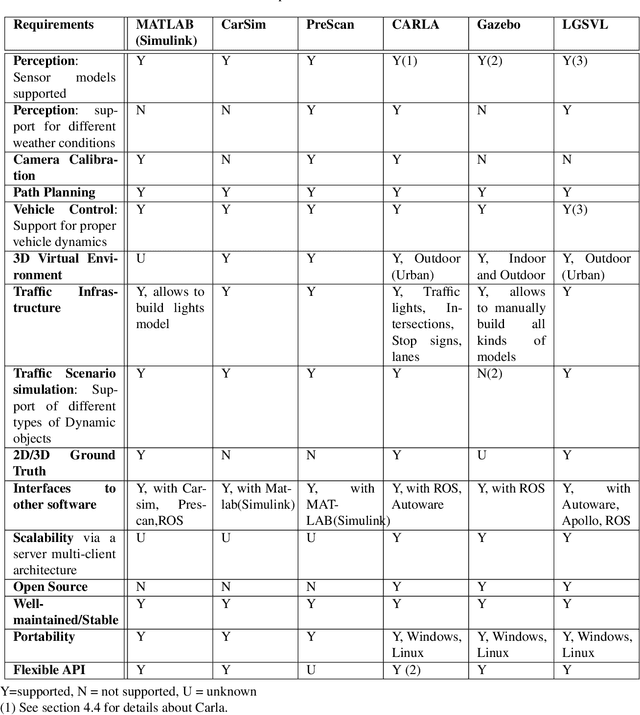
A rigorous and comprehensive testing plays a key role in training self-driving cars to handle variety of situations that they are expected to see on public roads. The physical testing on public roads is unsafe, costly, and not always reproducible. This is where testing in simulation helps fill the gap, however, the problem with simulation testing is that it is only as good as the simulator used for testing and how representative the simulated scenarios are of the real environment. In this paper, we identify key requirements that a good simulator must have. Further, we provide a comparison of commonly used simulators. Our analysis shows that CARLA and LGSVL simulators are the current state-of-the-art simulators for end to end testing of self-driving cars for the reasons mentioned in this paper. Finally, we also present current challenges that simulation testing continues to face as we march towards building fully autonomous cars.