 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnhancing Predictability of Multi-Tenant DNN Inference for Autonomous Vehicles' Perception
Feb 11, 2026Autonomous vehicles (AVs) rely on sensors and deep neural networks (DNNs) to perceive their surrounding environment and make maneuver decisions in real time. However, achieving real-time DNN inference in the AV's perception pipeline is challenging due to the large gap between the computation requirement and the AV's limited resources. Most, if not all, of existing studies focus on optimizing the DNN inference time to achieve faster perception by compressing the DNN model with pruning and quantization. In contrast, we present a Predictable Perception system with DNNs (PP-DNN) that reduce the amount of image data to be processed while maintaining the same level of accuracy for multi-tenant DNNs by dynamically selecting critical frames and regions of interest (ROIs). PP-DNN is based on our key insight that critical frames and ROIs for AVs vary with the AV's surrounding environment. However, it is challenging to identify and use critical frames and ROIs in multi-tenant DNNs for predictable inference. Given image-frame streams, PP-DNN leverages an ROI generator to identify critical frames and ROIs based on the similarities of consecutive frames and traffic scenarios. PP-DNN then leverages a FLOPs predictor to predict multiply-accumulate operations (MACs) from the dynamic critical frames and ROIs. The ROI scheduler coordinates the processing of critical frames and ROIs with multiple DNN models. Finally, we design a detection predictor for the perception of non-critical frames. We have implemented PP-DNN in an ROS-based AV pipeline and evaluated it with the BDD100K and the nuScenes dataset. PP-DNN is observed to significantly enhance perception predictability, increasing the number of fusion frames by up to 7.3x, reducing the fusion delay by >2.6x and fusion-delay variations by >2.3x, improving detection completeness by 75.4% and the cost-effectiveness by up to 98% over the baseline.
Achieving the Safety and Security of the End-to-End AV Pipeline
Sep 05, 2024
In the current landscape of autonomous vehicle (AV) safety and security research, there are multiple isolated problems being tackled by the community at large. Due to the lack of common evaluation criteria, several important research questions are at odds with one another. For instance, while much research has been conducted on physical attacks deceiving AV perception systems, there is often inadequate investigations on working defenses and on the downstream effects of safe vehicle control. This paper provides a thorough description of the current state of AV safety and security research. We provide individual sections for the primary research questions that concern this research area, including AV surveillance, sensor system reliability, security of the AV stack, algorithmic robustness, and safe environment interaction. We wrap up the paper with a discussion of the issues that concern the interactions of these separate problems. At the conclusion of each section, we propose future research questions that still lack conclusive answers. This position article will serve as an entry point to novice and veteran researchers seeking to partake in this research domain.
Understanding Time Variations of DNN Inference in Autonomous Driving
Sep 12, 2022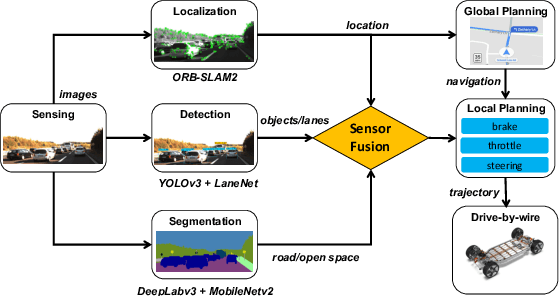
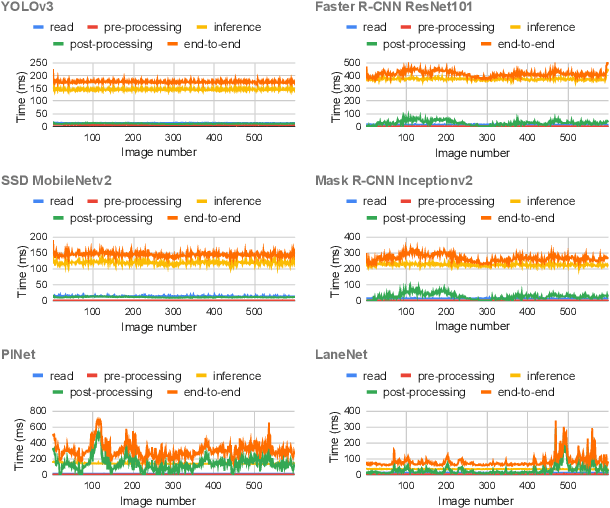
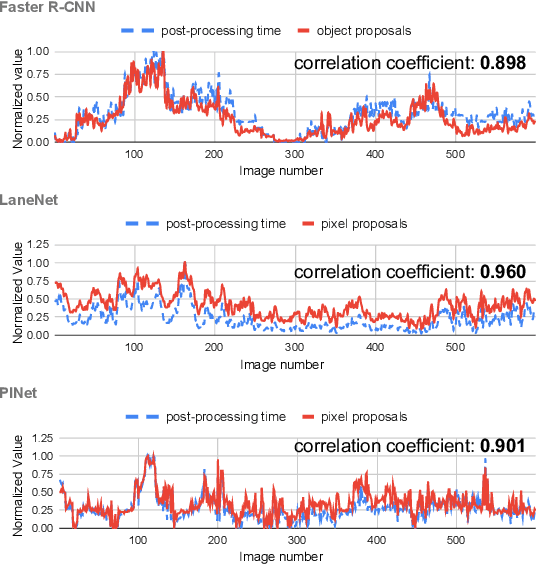
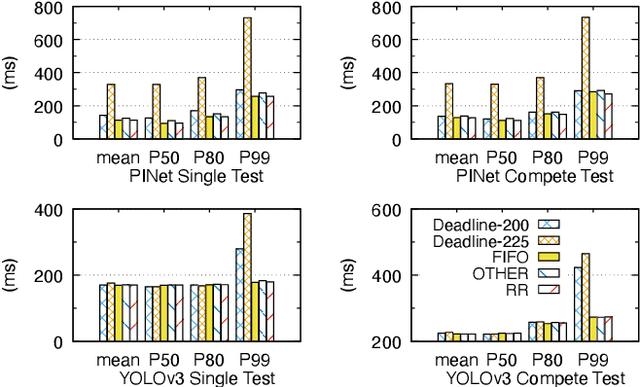
Deep neural networks (DNNs) are widely used in autonomous driving due to their high accuracy for perception, decision, and control. In safety-critical systems like autonomous driving, executing tasks like sensing and perception in real-time is vital to the vehicle's safety, which requires the application's execution time to be predictable. However, non-negligible time variations are observed in DNN inference. Current DNN inference studies either ignore the time variation issue or rely on the scheduler to handle it. None of the current work explains the root causes of DNN inference time variations. Understanding the time variations of the DNN inference becomes a fundamental challenge in real-time scheduling for autonomous driving. In this work, we analyze the time variation in DNN inference in fine granularity from six perspectives: data, I/O, model, runtime, hardware, and end-to-end perception system. Six insights are derived in understanding the time variations for DNN inference.
A Pulse-and-Glide-driven Adaptive Cruise Control System for Electric Vehicle
May 18, 2022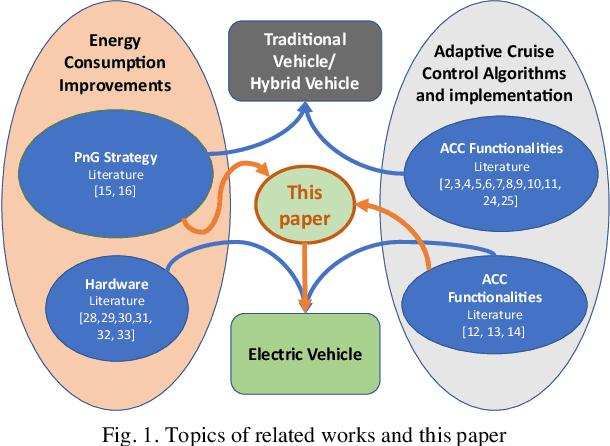
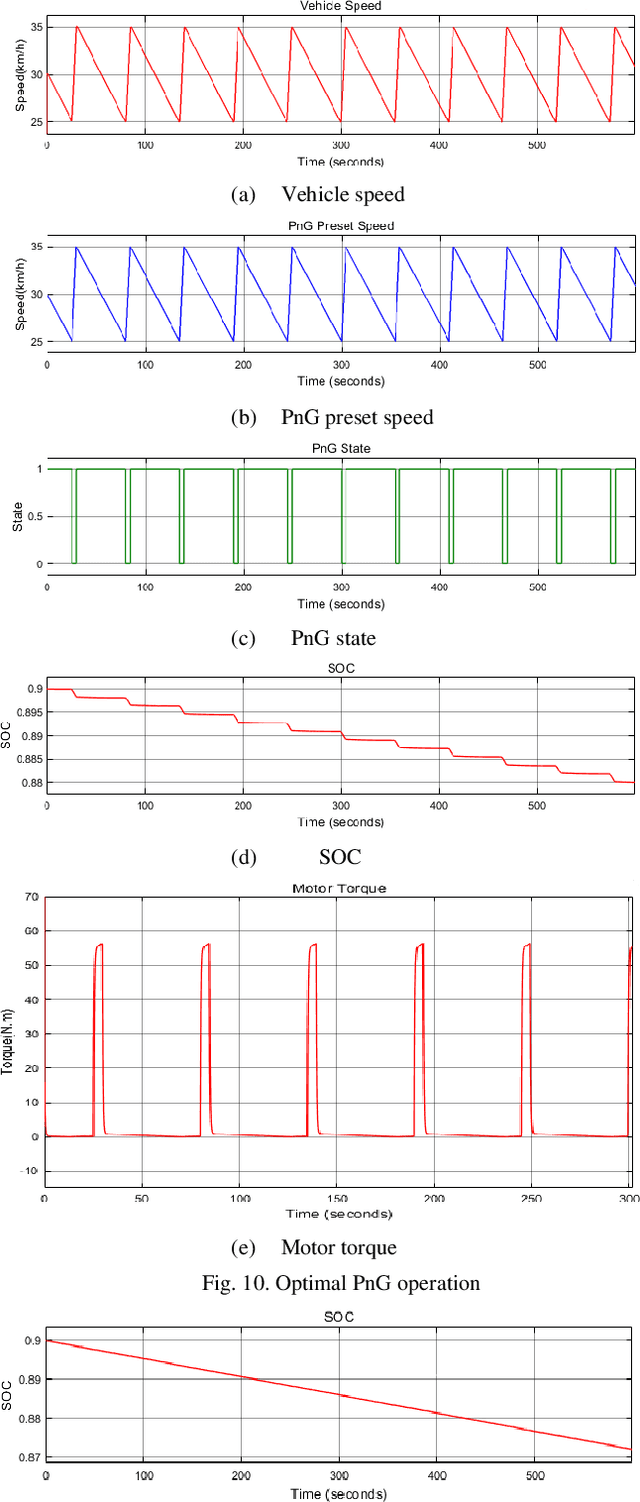
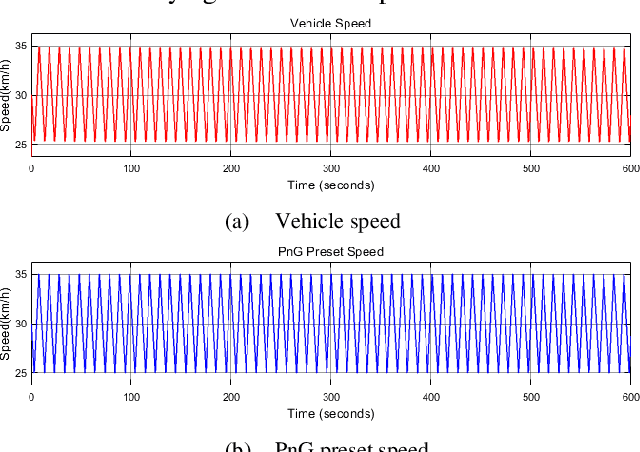
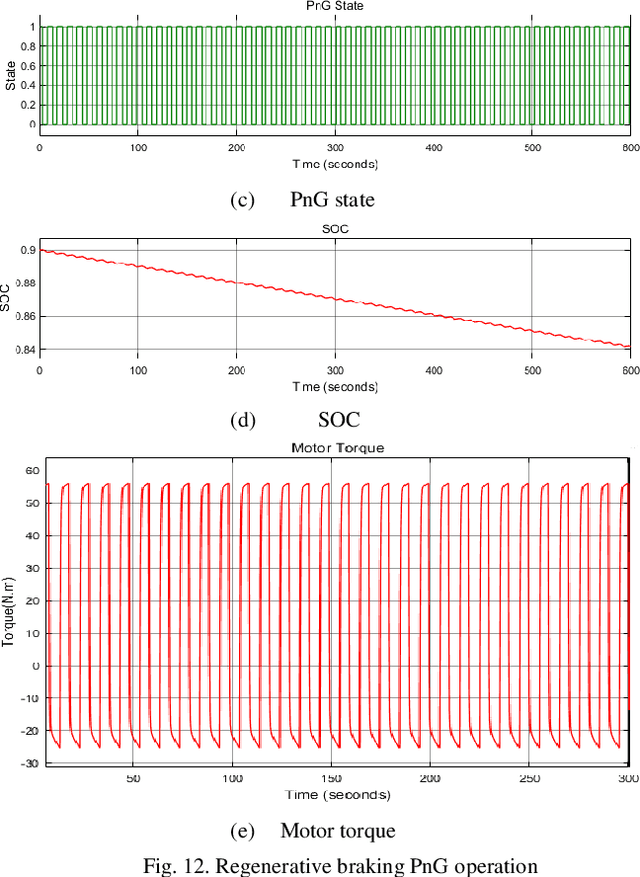
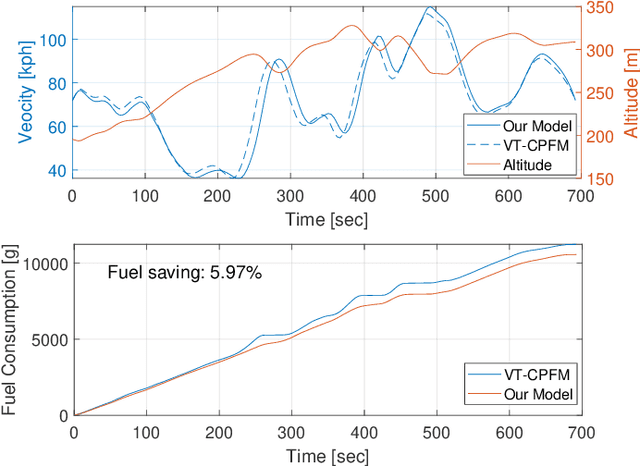
As the adaptive cruise control system (ACCS) on vehicles is well-developed today, vehicle manufacturers have increasingly employed this technology in new-generation intelligent vehicles. Pulse-and-glide (PnG) strategy is an efficacious driving strategy to diminish fuel consumption in traditional oil-fueled vehicles. However, current studies rarely focus on the verification of the energy-saving effect of PnG on an electric vehicle (EV) and embedding PnG in ACCS. This paper proposes a pulse-and-glide-driven adaptive cruise control system (PGACCS) model which leverages PnG strategy as a parallel function with cruise control (CC) and verifies that PnG is an efficacious energy-saving strategy on EV by optimizing the energy cost of the PnG operation using Intelligent Genetic Algorithm and Particle Swarm Optimization (IGPSO). This paper builds up a simulation model of an EV with regenerative braking and ACCS based on which the performance of PGACCS and regenerative braking is evaluated; the PnG energy performance is optimized and the effect of regenerative braking on PnG energy performance is evaluated. As a result of PnG optimization, the PnG operation in the PGACCS could cut down 28.3% energy cost of the EV compared to the CC operation in the traditional ACCS which verifies that PnG is an effective energy-saving strategy for EV and PGACCS is a promising option for EV.
4C: A Computation, Communication, and Control Co-Design Framework for CAVs
Jul 31, 2021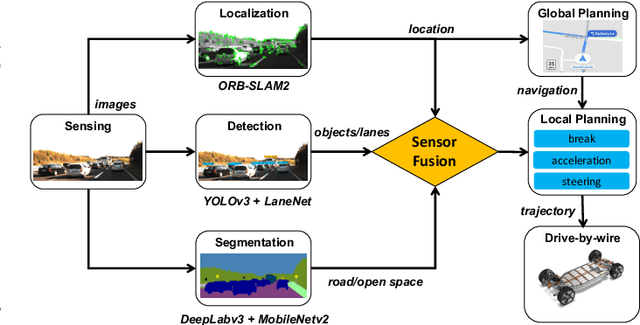

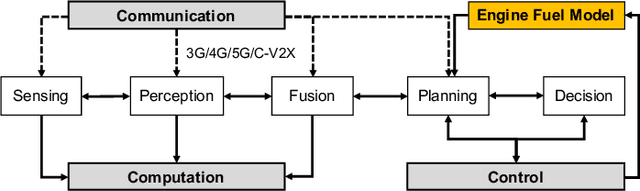
Connected and autonomous vehicles (CAVs) are promising due to their potential safety and efficiency benefits and have attracted massive investment and interest from government agencies, industry, and academia. With more computing and communication resources are available, both vehicles and edge servers are equipped with a set of camera-based vision sensors, also known as Visual IoT (V-IoT) techniques, for sensing and perception. Tremendous efforts have been made for achieving programmable communication, computation, and control. However, they are conducted mainly in the silo mode, limiting the responsiveness and efficiency of handling challenging scenarios in the real world. To improve the end-to-end performance, we envision that future CAVs require the co-design of communication, computation, and control. This paper presents our vision of the end-to-end design principle for CAVs, called 4C, which extends the V-IoT system by providing a unified communication, computation, and control co-design framework. With programmable communications, fine-grained heterogeneous computation, and efficient vehicle controls in 4C, CAVs can handle critical scenarios and achieve energy-efficient autonomous driving. Finally, we present several challenges to achieving the vision of the 4C framework.
Computing Systems for Autonomous Driving: State-of-the-Art and Challenges
Sep 30, 2020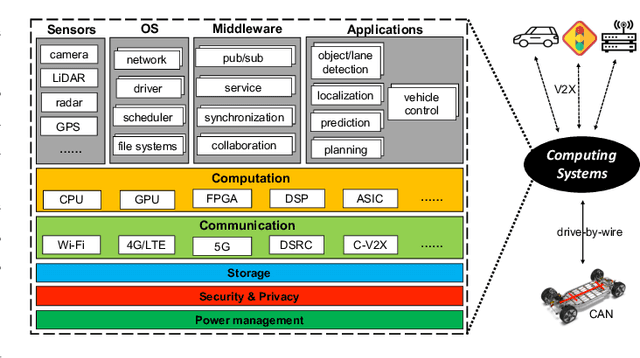
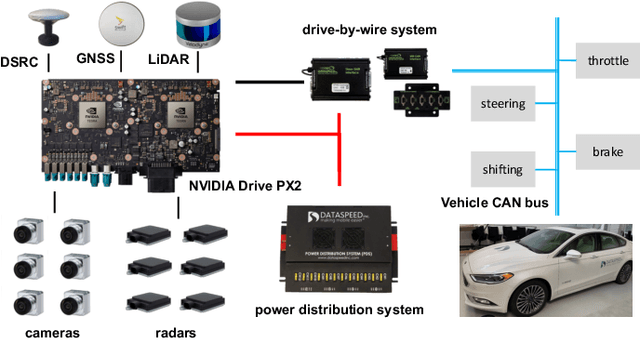
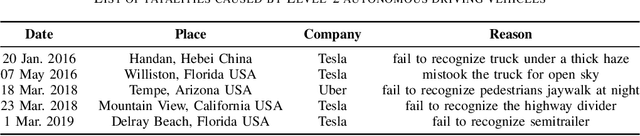
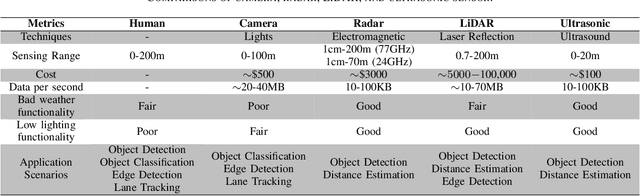
The recent proliferation of computing technologies, e.g., sensors, computer vision, machine learning, hardware acceleration, and the broad deployment of communication mechanisms, e.g., DSRC, C-V2X, 5G, have pushed the horizon of autonomous driving, which automates the decision and control of vehicles by leveraging the perception results based on multiple sensors. The key to the success of these autonomous systems is making a reliable decision in a real-time fashion. However, accidents and fatalities caused by early deployed autonomous vehicles arise from time to time. The real traffic environment is too complicated for the current autonomous driving computing systems to understand and handle. In this paper, we present the state-of-the-art computing systems for autonomous driving, including seven performance metrics and nine key technologies, followed by eleven challenges and opportunities to realize autonomous driving. We hope this paper will gain attention from both the computing and automotive communities and inspire more research in this direction.
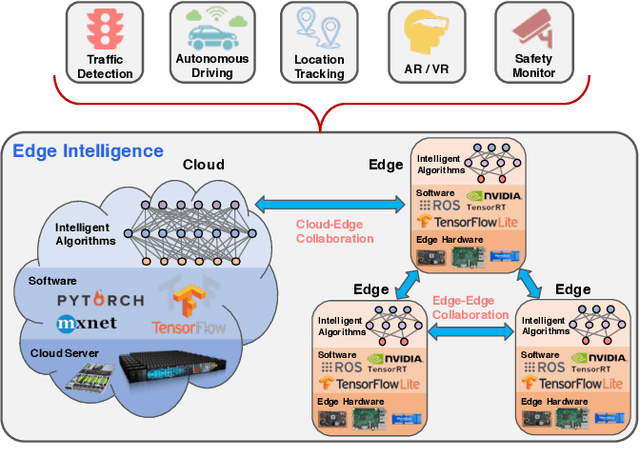
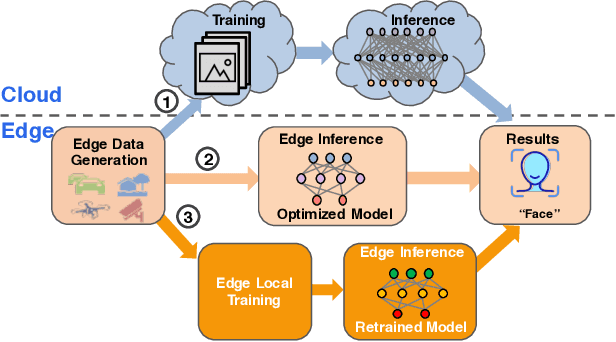
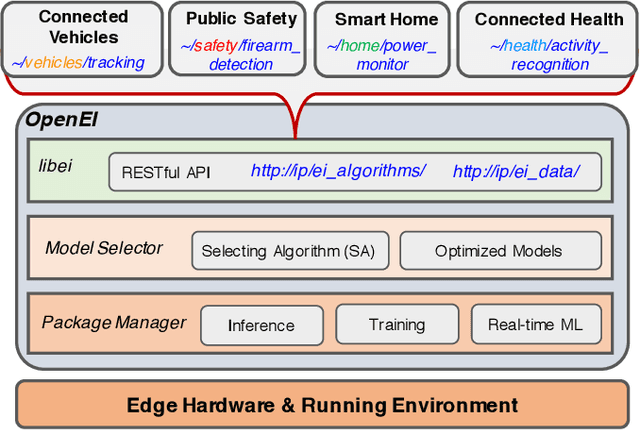
OpenEI: An Open Framework for Edge Intelligence
Jun 05, 2019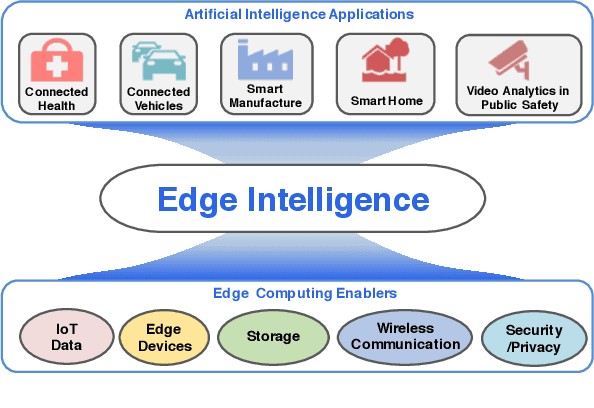
In the last five years, edge computing has attracted tremendous attention from industry and academia due to its promise to reduce latency, save bandwidth, improve availability, and protect data privacy to keep data secure. At the same time, we have witnessed the proliferation of AI algorithms and models which accelerate the successful deployment of intelligence mainly in cloud services. These two trends, combined together, have created a new horizon: Edge Intelligence (EI). The development of EI requires much attention from both the computer systems research community and the AI community to meet these demands. However, existing computing techniques used in the cloud are not applicable to edge computing directly due to the diversity of computing sources and the distribution of data sources. We envision that there missing a framework that can be rapidly deployed on edge and enable edge AI capabilities. To address this challenge, in this paper we first present the definition and a systematic review of EI. Then, we introduce an Open Framework for Edge Intelligence (OpenEI), which is a lightweight software platform to equip edges with intelligent processing and data sharing capability. We analyze four fundamental EI techniques which are used to build OpenEI and identify several open problems based on potential research directions. Finally, four typical application scenarios enabled by OpenEI are presented.