 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBudget-Aware Adaptive Adversarial Patches for Black-Box Object Detection
Jun 16, 2026Adversarial patches pose a practical threat to modern object detectors. Prior work shows vulnerability, but three gaps limit actionable insight: (i) few \emph{score-based black-box} attacks \emph{jointly} optimize patch \emph{location, texture, and size} under tight query budgets; (ii) success is rarely tied to the patch's \emph{visual footprint}; and (iii) evaluations often conflate EOT robustness with plain-view suppression. We present \method{}, a query-efficient, budget-adaptive black-box attack that couples a lightweight \emph{Contextual Thompson-Sampling} placer with NES-style pixel updates, growing the patch only when progress stalls. Reporting is anchored by a \emph{strict plain-image} suppression test; EOT is audited but never used as a substitute for success, and optional appearance/printability weights expose strength--visibility trade-offs. Across YOLOv5, Faster R-CNN, and YOLOS, \method{} achieves strong suppression on CNN-based detectors and substantial suppression on the transformer-based detector, using compact patches and exposing clear query--footprint trade-offs relative to fixed-size and heuristic baselines. A print--capture pilot further shows transfer across unseen physical objects and viewpoints.
Comparative Analysis of Patch Attack on VLM-Based Autonomous Driving Architectures
Mar 09, 2026Vision-language models are emerging for autonomous driving, yet their robustness to physical adversarial attacks remains unexplored. This paper presents a systematic framework for comparative adversarial evaluation across three VLM architectures: Dolphins, OmniDrive (Omni-L), and LeapVAD. Using black-box optimization with semantic homogenization for fair comparison, we evaluate physically realizable patch attacks in CARLA simulation. Results reveal severe vulnerabilities across all architectures, sustained multi-frame failures, and critical object detection degradation. Our analysis exposes distinct architectural vulnerability patterns, demonstrating that current VLM designs inadequately address adversarial threats in safety-critical autonomous driving applications.
NPNet: A Non-Parametric Network with Adaptive Gaussian-Fourier Positional Encoding for 3D Classification and Segmentation
Jan 31, 2026We present NPNet, a fully non-parametric approach for 3D point-cloud classification and part segmentation. NPNet contains no learned weights; instead, it builds point features using deterministic operators such as farthest point sampling, k-nearest neighbors, and pooling. Our key idea is an adaptive Gaussian-Fourier positional encoding whose bandwidth and Gaussian-cosine mixing are chosen from the input geometry, helping the method remain stable across different scales and sampling densities. For segmentation, we additionally incorporate fixed-frequency Fourier features to provide global context alongside the adaptive encoding. Across ModelNet40/ModelNet-R, ScanObjectNN, and ShapeNetPart, NPNet achieves strong performance among non-parametric baselines, and it is particularly effective in few-shot settings on ModelNet40. NPNet also offers favorable memory use and inference time compared to prior non-parametric methods
David vs. Goliath: A comparative study of different-sized LLMs for code generation in the domain of automotive scenario generation
Oct 15, 2025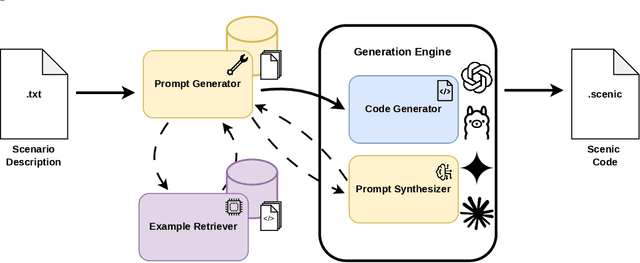



Scenario simulation is central to testing autonomous driving systems. Scenic, a domain-specific language (DSL) for CARLA, enables precise and reproducible scenarios, but NL-to-Scenic generation with large language models (LLMs) suffers from scarce data, limited reproducibility, and inconsistent metrics. We introduce NL2Scenic, an open dataset and framework with 146 NL/Scenic pairs, a difficulty-stratified 30-case test split, an Example Retriever, and 14 prompting variants (ZS, FS, CoT, SP, MoT). We evaluate 13 models: four proprietary (GPT-4o, GPT-5, Claude-Sonnet-4, Gemini-2.5-pro) and nine open-source code models (Qwen2.5Coder 0.5B-32B; CodeLlama 7B/13B/34B), using text metrics (BLEU, ChrF, EDIT-SIM, CrystalBLEU) and execution metrics (compilation and generation), and compare them with an expert study (n=11). EDIT-SIM correlates best with human judgments; we also propose EDIT-COMP (F1 of EDIT-SIM and compilation) as a robust dataset-level proxy that improves ranking fidelity. GPT-4o performs best overall, while Qwen2.5Coder-14B reaches about 88 percent of its expert score on local hardware. Retrieval-augmented prompting, Few-Shot with Example Retriever (FSER), consistently boosts smaller models, and scaling shows diminishing returns beyond mid-size, with Qwen2.5Coder outperforming CodeLlama at comparable scales. NL2Scenic and EDIT-COMP offer a standardized, reproducible basis for evaluating Scenic code generation and indicate that mid-size open-source models are practical, cost-effective options for autonomous-driving scenario programming.
Enhancing 3D Point Cloud Classification with ModelNet-R and Point-SkipNet
Sep 05, 2025



The classification of 3D point clouds is crucial for applications such as autonomous driving, robotics, and augmented reality. However, the commonly used ModelNet40 dataset suffers from limitations such as inconsistent labeling, 2D data, size mismatches, and inadequate class differentiation, which hinder model performance. This paper introduces ModelNet-R, a meticulously refined version of ModelNet40 designed to address these issues and serve as a more reliable benchmark. Additionally, this paper proposes Point-SkipNet, a lightweight graph-based neural network that leverages efficient sampling, neighborhood grouping, and skip connections to achieve high classification accuracy with reduced computational overhead. Extensive experiments demonstrate that models trained in ModelNet-R exhibit significant performance improvements. Notably, Point-SkipNet achieves state-of-the-art accuracy on ModelNet-R with a substantially lower parameter count compared to contemporary models. This research highlights the crucial role of dataset quality in optimizing model efficiency for 3D point cloud classification. For more details, see the code at: https://github.com/m-saeid/ModeNetR_PointSkipNet.
On the Natural Robustness of Vision-Language Models Against Visual Perception Attacks in Autonomous Driving
Jun 13, 2025Autonomous vehicles (AVs) rely on deep neural networks (DNNs) for critical tasks such as traffic sign recognition (TSR), automated lane centering (ALC), and vehicle detection (VD). However, these models are vulnerable to attacks that can cause misclassifications and compromise safety. Traditional defense mechanisms, including adversarial training, often degrade benign accuracy and fail to generalize against unseen attacks. In this work, we introduce Vehicle Vision Language Models (V2LMs), fine-tuned vision-language models specialized for AV perception. Our findings demonstrate that V2LMs inherently exhibit superior robustness against unseen attacks without requiring adversarial training, maintaining significantly higher accuracy than conventional DNNs under adversarial conditions. We evaluate two deployment strategies: Solo Mode, where individual V2LMs handle specific perception tasks, and Tandem Mode, where a single unified V2LM is fine-tuned for multiple tasks simultaneously. Experimental results reveal that DNNs suffer performance drops of 33% to 46% under attacks, whereas V2LMs maintain adversarial accuracy with reductions of less than 8% on average. The Tandem Mode further offers a memory-efficient alternative while achieving comparable robustness to Solo Mode. We also explore integrating V2LMs as parallel components to AV perception to enhance resilience against adversarial threats. Our results suggest that V2LMs offer a promising path toward more secure and resilient AV perception systems.
Point-LN: A Lightweight Framework for Efficient Point Cloud Classification Using Non-Parametric Positional Encoding
Jan 24, 2025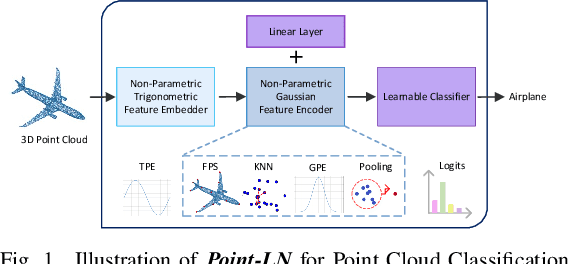



We introduce Point-LN, a novel lightweight framework engineered for efficient 3D point cloud classification. Point-LN integrates essential non-parametric components-such as Farthest Point Sampling (FPS), k-Nearest Neighbors (k-NN), and non-learnable positional encoding-with a streamlined learnable classifier that significantly enhances classification accuracy while maintaining a minimal parameter footprint. This hybrid architecture ensures low computational costs and rapid inference speeds, making Point-LN ideal for real-time and resource-constrained applications. Comprehensive evaluations on benchmark datasets, including ModelNet40 and ScanObjectNN, demonstrate that Point-LN achieves competitive performance compared to state-of-the-art methods, all while offering exceptional efficiency. These results establish Point-LN as a robust and scalable solution for diverse point cloud classification tasks, highlighting its potential for widespread adoption in various computer vision applications.
Transforming In-Vehicle Network Intrusion Detection: VAE-based Knowledge Distillation Meets Explainable AI
Oct 11, 2024



In the evolving landscape of autonomous vehicles, ensuring robust in-vehicle network (IVN) security is paramount. This paper introduces an advanced intrusion detection system (IDS) called KD-XVAE that uses a Variational Autoencoder (VAE)-based knowledge distillation approach to enhance both performance and efficiency. Our model significantly reduces complexity, operating with just 1669 parameters and achieving an inference time of 0.3 ms per batch, making it highly suitable for resource-constrained automotive environments. Evaluations in the HCRL Car-Hacking dataset demonstrate exceptional capabilities, attaining perfect scores (Recall, Precision, F1 Score of 100%, and FNR of 0%) under multiple attack types, including DoS, Fuzzing, Gear Spoofing, and RPM Spoofing. Comparative analysis on the CICIoV2024 dataset further underscores its superiority over traditional machine learning models, achieving perfect detection metrics. We furthermore integrate Explainable AI (XAI) techniques to ensure transparency in the model's decisions. The VAE compresses the original feature space into a latent space, on which the distilled model is trained. SHAP(SHapley Additive exPlanations) values provide insights into the importance of each latent dimension, mapped back to original features for intuitive understanding. Our paper advances the field by integrating state-of-the-art techniques, addressing critical challenges in the deployment of efficient, trustworthy, and reliable IDSes for autonomous vehicles, ensuring enhanced protection against emerging cyber threats.
Achieving the Safety and Security of the End-to-End AV Pipeline
Sep 05, 2024
In the current landscape of autonomous vehicle (AV) safety and security research, there are multiple isolated problems being tackled by the community at large. Due to the lack of common evaluation criteria, several important research questions are at odds with one another. For instance, while much research has been conducted on physical attacks deceiving AV perception systems, there is often inadequate investigations on working defenses and on the downstream effects of safe vehicle control. This paper provides a thorough description of the current state of AV safety and security research. We provide individual sections for the primary research questions that concern this research area, including AV surveillance, sensor system reliability, security of the AV stack, algorithmic robustness, and safe environment interaction. We wrap up the paper with a discussion of the issues that concern the interactions of these separate problems. At the conclusion of each section, we propose future research questions that still lack conclusive answers. This position article will serve as an entry point to novice and veteran researchers seeking to partake in this research domain.