 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUCAgent: An End-to-End Agent for Block-Level Functional Verification
Mar 26, 2026Functional verification remains a critical bottleneck in modern IC development cycles, accounting for approximately 70% of total development time in many projects. However, traditional methods, including constrained-random and formal verification, struggle to keep pace with the growing complexity of modern semiconductor designs. While recent advances in Large Language Models (LLMs) have shown promise in code generation and task automation, significant challenges hinder the realization of end-to-end functional verification automation. These challenges include (i) limited accuracy in generating Verilog/SystemVerilog verification code, (ii) the fragility of LLMs when executing complex, multi-step verification workflows, and (iii) the difficulty of maintaining verification consistency across specifications, coverage models, and test cases throughout the workflow. To address these challenges, we propose UCAgent, an end-to-end agent that automates hardware block-level functional verification based on three core mechanisms. First, we establish a pure Python verification environment using Picker and Toffee to avoid relying on LLM-generated SystemVerilog verification code. Second, we introduce a configurable 31-stage fine-grained verification workflow to guide the LLM, where each stage is verified by an automated checker. Furthermore, we propose a Verification Consistency Labeling Mechanism (VCLM) that assigns hierarchical labels to LLM-generated artifacts, improving the reliability and traceability of verification. Experimental results show that UCAgent can complete end-to-end automated verification on multiple modules, including the UART, FPU, and integer divider modules, achieving up to 98.5% code coverage and up to 100% functional coverage. UCAgent also discovers previously unidentified design defects in realistic designs, demonstrating its practical potential.
INTERNEURON: A Middleware with Multi-Network Communication Reliability for Infrastructure Vehicle Cooperative Autonomous Driving
Oct 28, 2022



Infrastructure-Vehicle Cooperative Autonomous Driving (IVCAD) is a new paradigm of autonomous driving, which relies on the cooperation between intelligent roads and autonomous vehicles. This paradigm has been shown to be safer and more efficient compared to the on-vehicle-only autonomous driving paradigm. Our real-world deployment data indicates that the effectiveness of IVCAD is constrained by reliability and performance of commercial communication networks. This paper targets this exact problem, and proposes INTERNEURON, a middleware to achieve high communication reliability between intelligent roads and autonomous vehicles, in the context of IVCAD. Specifically, INTERNEURON dynamically matches IVCAD applications and the underlying communication technologies based on varying communication performance and quality needs. Evaluation results confirm that INTERNEURON reduces deadline violations by more than 95\%, significantly improving the reliability of IVCAD systems.
JITuNE: Just-In-Time Hyperparameter Tuning for Network Embedding Algorithms
Jan 19, 2021

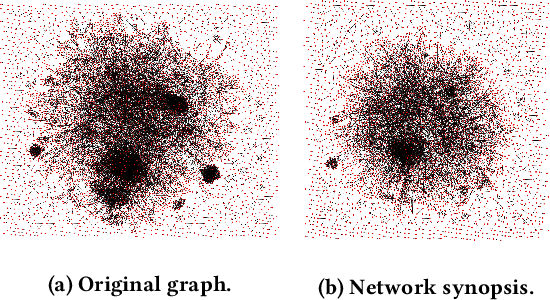

Network embedding (NE) can generate succinct node representations for massive-scale networks and enable direct applications of common machine learning methods to the network structure. Various NE algorithms have been proposed and used in a number of applications, such as node classification and link prediction. NE algorithms typically contain hyperparameters that are key to performance, but the hyperparameter tuning process can be time consuming. It is desirable to have the hyperparameters tuned within a specified length of time. Although AutoML methods have been applied to the hyperparameter tuning of NE algorithms, the problem of how to tune hyperparameters in a given period of time is not studied for NE algorithms before. In this paper, we propose JITuNE, a just-in-time hyperparameter tuning framework for NE algorithms. Our JITuNE framework enables the time-constrained hyperparameter tuning for NE algorithms by employing the tuning over hierarchical network synopses and transferring the knowledge obtained on synopses to the whole network. The hierarchical generation of synopsis and a time-constrained tuning method enable the constraining of overall tuning time. Extensive experiments demonstrate that JITuNE can significantly improve performances of NE algorithms, outperforming state-of-the-art methods within the same number of algorithm runs.
Avalon: Building an Operating System for Robotcenter
May 02, 2018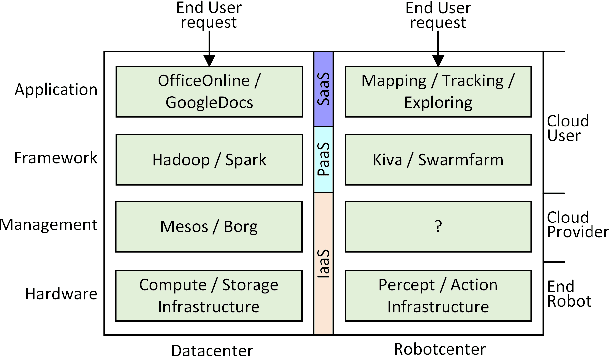
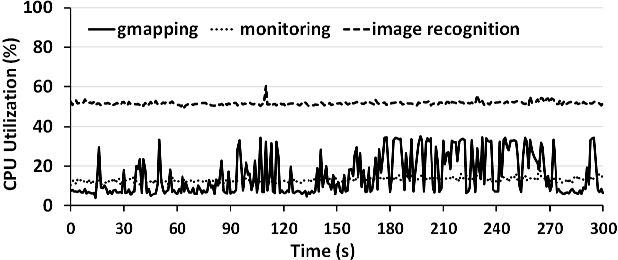
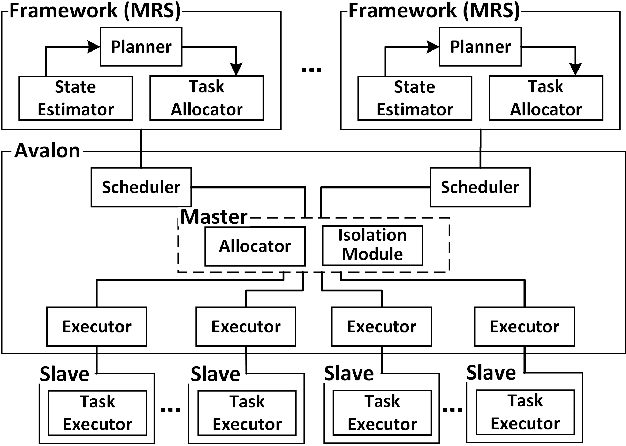

This paper envisions a scenario that hundreds of heterogeneous robots form a robotcenter which can be shared by multiple users and used like a single powerful robot to perform complex tasks. However, current multi-robot systems are either unable to manage heterogeneous robots or unable to support multiple concurrent users. Inspired by the design of modern datacenter OSes, we propose Avalon, a robot operating system with two-level scheduling scheme which is widely adopted in datacenters for Internet services and cloud computing. Specifically, Avalon integrates three important features together: (1) Instead of allocating a whole robot, Avalon classifies fine-grained robot resources into three categories to distinguish which fine-grained resources can be shared by multi-robot frameworks simultaneously. (2) Avalon adopts a location based resource allocation policy to substantially reduce scheduling overhead. (3) Avalon enables robots to offload computation intensive tasks to the clouds.We have implemented and evaluated Avalon on robots on both simulated environments and real world.