 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRRAttention: Dynamic Block Sparse Attention via Per-Head Round-Robin Shifts for Long-Context Inference
Feb 05, 2026The quadratic complexity of attention mechanisms poses a critical bottleneck for large language models processing long contexts. While dynamic sparse attention methods offer input-adaptive efficiency, they face fundamental trade-offs: requiring preprocessing, lacking global evaluation, violating query independence, or incurring high computational overhead. We present RRAttention, a novel dynamic sparse attention method that simultaneously achieves all desirable properties through a head \underline{r}ound-\underline{r}obin (RR) sampling strategy. By rotating query sampling positions across attention heads within each stride, RRAttention maintains query independence while enabling efficient global pattern discovery with stride-level aggregation. Our method reduces complexity from $O(L^2)$ to $O(L^2/S^2)$ and employs adaptive Top-$τ$ selection for optimal sparsity. Extensive experiments on natural language understanding (HELMET) and multimodal video comprehension (Video-MME) demonstrate that RRAttention recovers over 99\% of full attention performance while computing only half of the attention blocks, achieving 2.4$\times$ speedup at 128K context length and outperforming existing dynamic sparse attention methods.
INTERNEURON: A Middleware with Multi-Network Communication Reliability for Infrastructure Vehicle Cooperative Autonomous Driving
Oct 28, 2022



Infrastructure-Vehicle Cooperative Autonomous Driving (IVCAD) is a new paradigm of autonomous driving, which relies on the cooperation between intelligent roads and autonomous vehicles. This paradigm has been shown to be safer and more efficient compared to the on-vehicle-only autonomous driving paradigm. Our real-world deployment data indicates that the effectiveness of IVCAD is constrained by reliability and performance of commercial communication networks. This paper targets this exact problem, and proposes INTERNEURON, a middleware to achieve high communication reliability between intelligent roads and autonomous vehicles, in the context of IVCAD. Specifically, INTERNEURON dynamically matches IVCAD applications and the underlying communication technologies based on varying communication performance and quality needs. Evaluation results confirm that INTERNEURON reduces deadline violations by more than 95\%, significantly improving the reliability of IVCAD systems.
Avalon: Building an Operating System for Robotcenter
May 02, 2018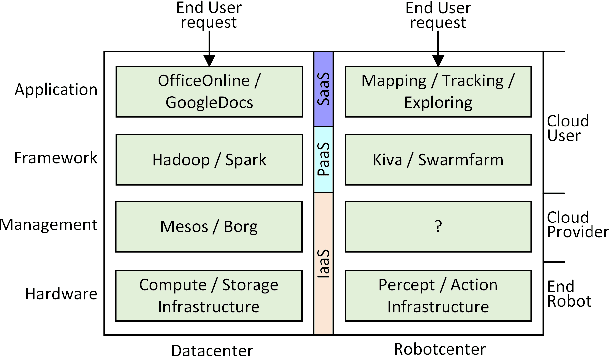
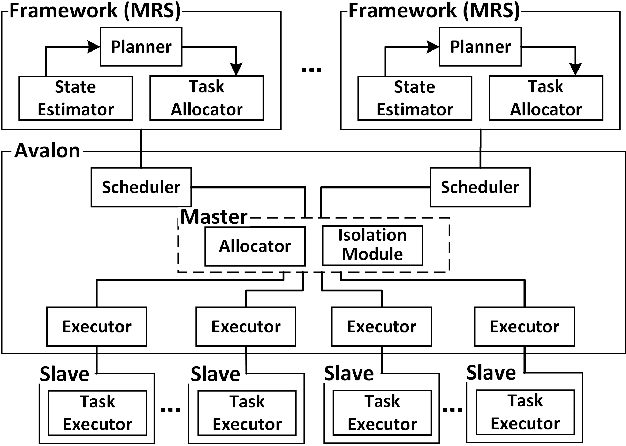

This paper envisions a scenario that hundreds of heterogeneous robots form a robotcenter which can be shared by multiple users and used like a single powerful robot to perform complex tasks. However, current multi-robot systems are either unable to manage heterogeneous robots or unable to support multiple concurrent users. Inspired by the design of modern datacenter OSes, we propose Avalon, a robot operating system with two-level scheduling scheme which is widely adopted in datacenters for Internet services and cloud computing. Specifically, Avalon integrates three important features together: (1) Instead of allocating a whole robot, Avalon classifies fine-grained robot resources into three categories to distinguish which fine-grained resources can be shared by multi-robot frameworks simultaneously. (2) Avalon adopts a location based resource allocation policy to substantially reduce scheduling overhead. (3) Avalon enables robots to offload computation intensive tasks to the clouds.We have implemented and evaluated Avalon on robots on both simulated environments and real world.