 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCoServe: Efficient Collaboration-of-Experts (CoE) Model Inference with Limited Memory
Mar 04, 2025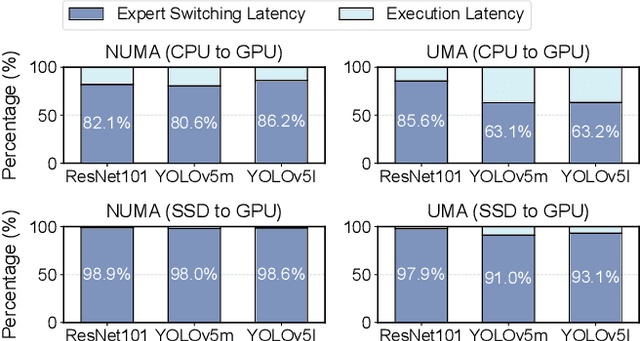
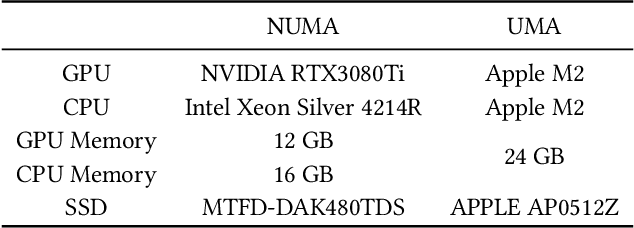
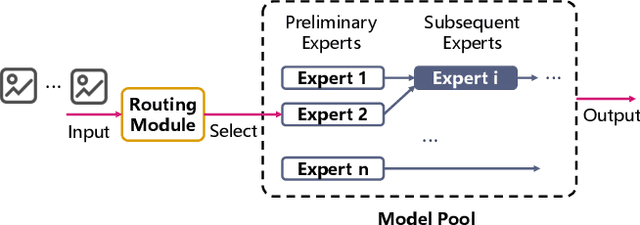
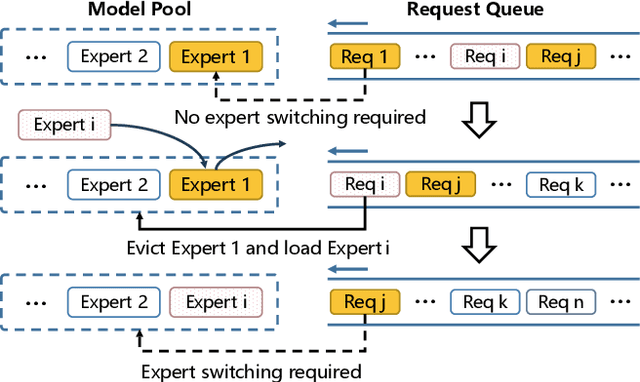
Large language models like GPT-4 are resource-intensive, but recent advancements suggest that smaller, specialized experts can outperform the monolithic models on specific tasks. The Collaboration-of-Experts (CoE) approach integrates multiple expert models, improving the accuracy of generated results and offering great potential for precision-critical applications, such as automatic circuit board quality inspection. However, deploying CoE serving systems presents challenges to memory capacity due to the large number of experts required, which can lead to significant performance overhead from frequent expert switching across different memory and storage tiers. We propose CoServe, an efficient CoE model serving system on heterogeneous CPU and GPU with limited memory. CoServe reduces unnecessary expert switching by leveraging expert dependency, a key property of CoE inference. CoServe introduces a dependency-aware request scheduler and dependency-aware expert management for efficient inference. It also introduces an offline profiler to automatically find optimal resource allocation on various processors and devices. In real-world intelligent manufacturing workloads, CoServe achieves 4.5$\times$ to 12$\times$ higher throughput compared to state-of-the-art systems.
* Accepted to ASPLOS '25
E3-UAV: An Edge-based Energy-Efficient Object Detection System for Unmanned Aerial Vehicles
Aug 09, 2023
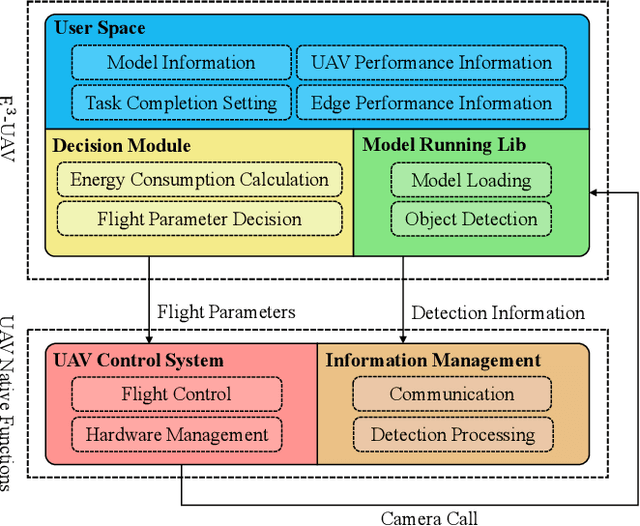
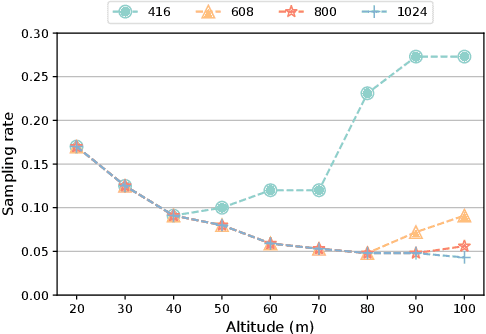
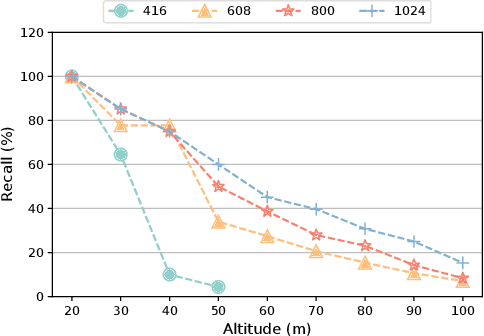
Motivated by the advances in deep learning techniques, the application of Unmanned Aerial Vehicle (UAV)-based object detection has proliferated across a range of fields, including vehicle counting, fire detection, and city monitoring. While most existing research studies only a subset of the challenges inherent to UAV-based object detection, there are few studies that balance various aspects to design a practical system for energy consumption reduction. In response, we present the E3-UAV, an edge-based energy-efficient object detection system for UAVs. The system is designed to dynamically support various UAV devices, edge devices, and detection algorithms, with the aim of minimizing energy consumption by deciding the most energy-efficient flight parameters (including flight altitude, flight speed, detection algorithm, and sampling rate) required to fulfill the detection requirements of the task. We first present an effective evaluation metric for actual tasks and construct a transparent energy consumption model based on hundreds of actual flight data to formalize the relationship between energy consumption and flight parameters. Then we present a lightweight energy-efficient priority decision algorithm based on a large quantity of actual flight data to assist the system in deciding flight parameters. Finally, we evaluate the performance of the system, and our experimental results demonstrate that it can significantly decrease energy consumption in real-world scenarios. Additionally, we provide four insights that can assist researchers and engineers in their efforts to study UAV-based object detection further.
* 16 pages, 8 figures
HIT-UAV: A High-altitude Infrared Thermal Dataset for Unmanned Aerial Vehicles
Apr 07, 2022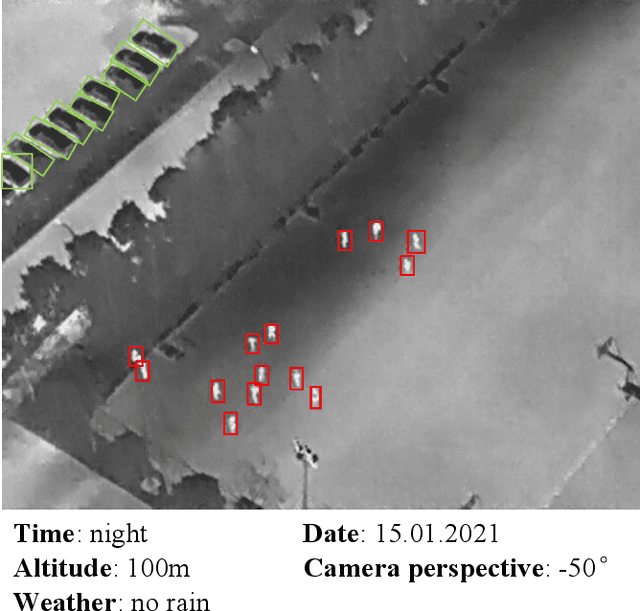
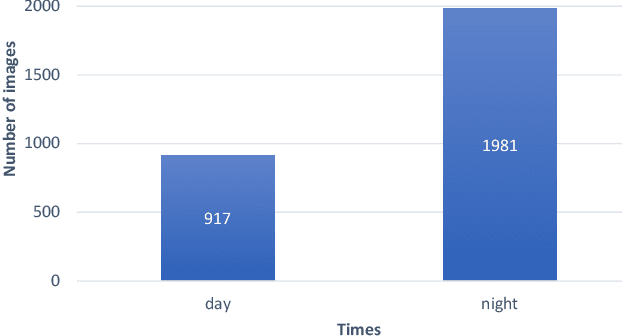
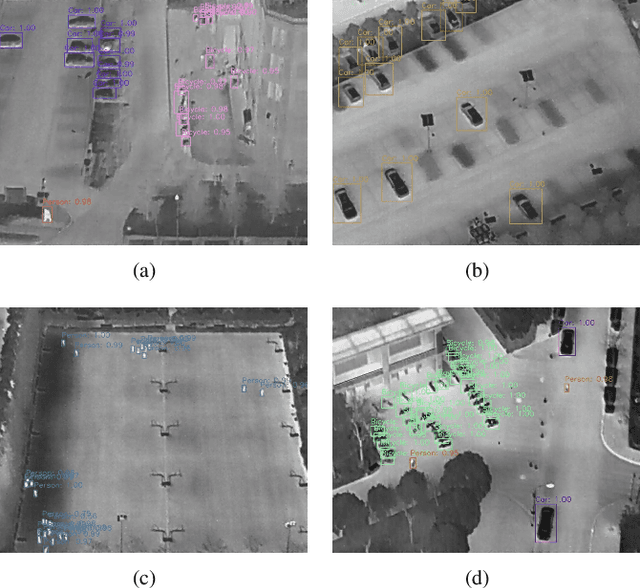
This paper presents a High-altitude infrared thermal dataset, HIT-UAV, for object detection applications on Unmanned Aerial Vehicles (UAVs). HIT-UAV contains 2898 infrared thermal images extracted from 43470 frames. These images are collected by UAV from schools, parking lots, roads, playgrounds, etc. HIT-UAV provides different flight data for each place, including flight altitude (from 60 to 130 meters), camera perspective (from 30 to 90 degrees), date, and daylight intensity. For each image, the HIT-UAV manual annotates object instances with two types of the bounding box (oriented and standard) to address the challenge that object instances have a significant overlap in aerial images. To the best of our knowledge, HIT-UAV is the first publicly available high-altitude infrared thermal UAV dataset for persons and vehicles detection. Moreover, we trained and evaluated the benchmark detection algorithms (YOLOv4 and YOLOv4-tiny) on HIT-UAV. Compared to the visual light dataset, the detection algorithms have excellent performance on HIT-UAV because the infrared thermal images do not contain a significant quantity of irrelevant information with detection objects. This indicates that infrared thermal datasets can significantly promote the development of object detection applications. We hope HIT-UAV contributes to UAV applications such as traffic surveillance and city monitoring at night. The dataset is available at https://github.com/suojiashun/HIT-UAV-Infrared-Thermal-Dataset.