 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeformable Groupwise Registration Using a Locally Low-Rank Dissimilarity Metric for Myocardial Strain Estimation from Cardiac Cine MRI Images
Nov 13, 2023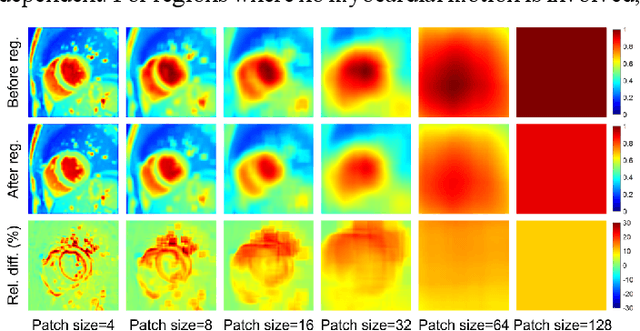
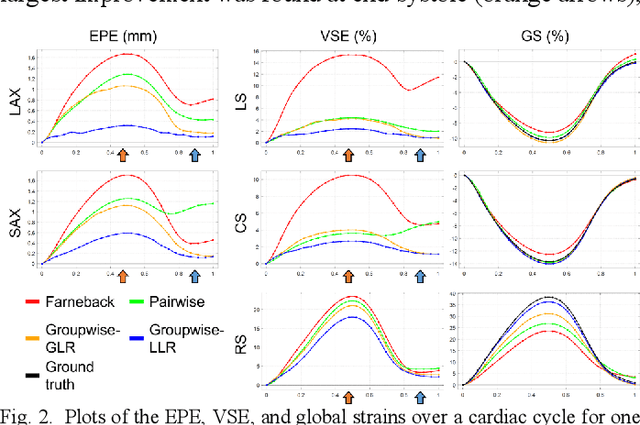
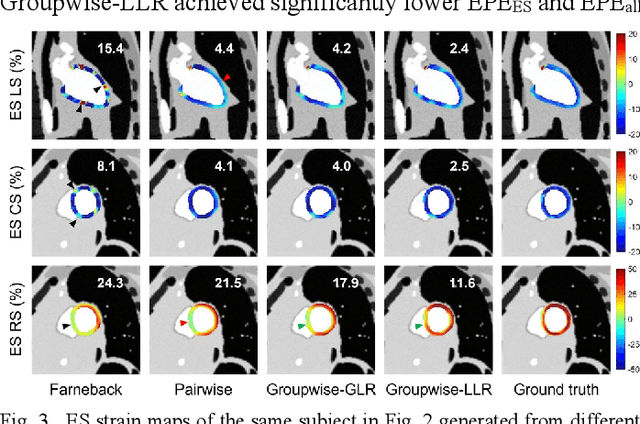
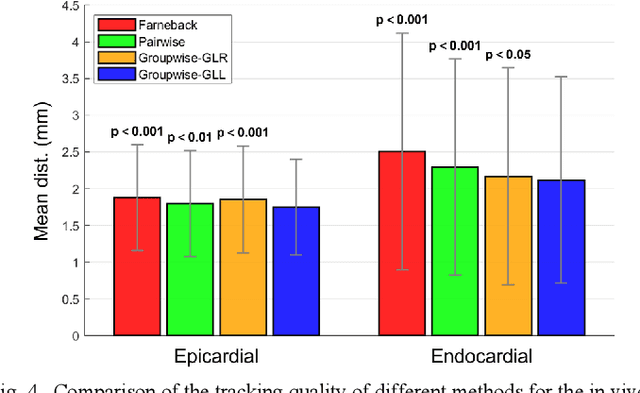
Objective: Cardiovascular magnetic resonance-feature tracking (CMR-FT) represents a group of methods for myocardial strain estimation from cardiac cine MRI images. Established CMR-FT methods are mainly based on optical flow or pairwise registration. However, these methods suffer from either inaccurate estimation of large motion or drift effect caused by accumulative tracking errors. In this work, we propose a deformable groupwise registration method using a locally low-rank (LLR) dissimilarity metric for CMR-FT. Methods: The proposed method (Groupwise-LLR) tracks the feature points by a groupwise registration-based two-step strategy. Unlike the globally low-rank (GLR) dissimilarity metric, the proposed LLR metric imposes low-rankness on local image patches rather than the whole image. We quantitatively compared Groupwise-LLR with the Farneback optical flow, a pairwise registration method, and a GLR-based groupwise registration method on simulated and in vivo datasets. Results: Results from the simulated dataset showed that Groupwise-LLR achieved more accurate tracking and strain estimation compared with the other methods. Results from the in vivo dataset showed that Groupwise-LLR achieved more accurate tracking and elimination of the drift effect in late-diastole. Inter-observer reproducibility of strain estimates was similar between all studied methods. Conclusion: The proposed method estimates myocardial strains more accurately due to the application of a groupwise registration-based tracking strategy and an LLR-based dissimilarity metric. Significance: The proposed CMR-FT method may facilitate more accurate estimation of myocardial strains, especially in diastole, for clinical assessments of cardiac dysfunction.
HIT-UAV: A High-altitude Infrared Thermal Dataset for Unmanned Aerial Vehicles
Apr 07, 2022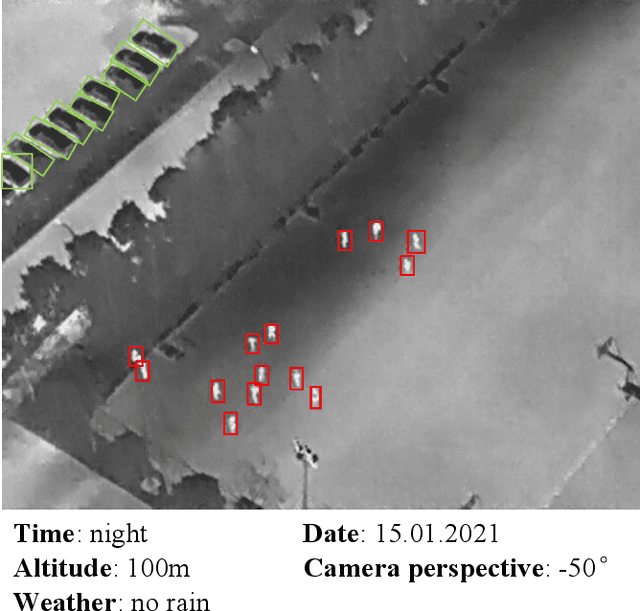
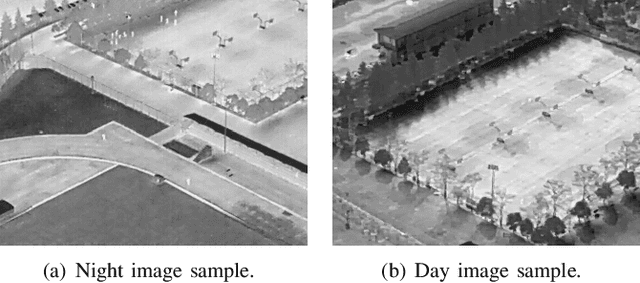
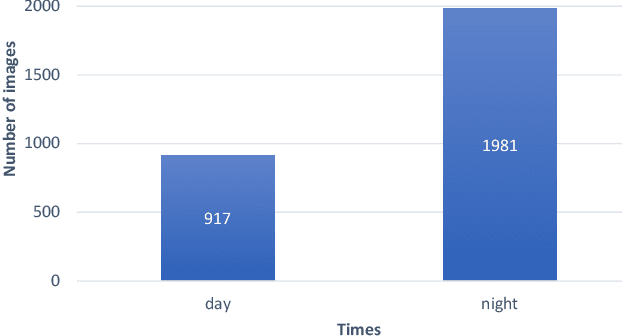
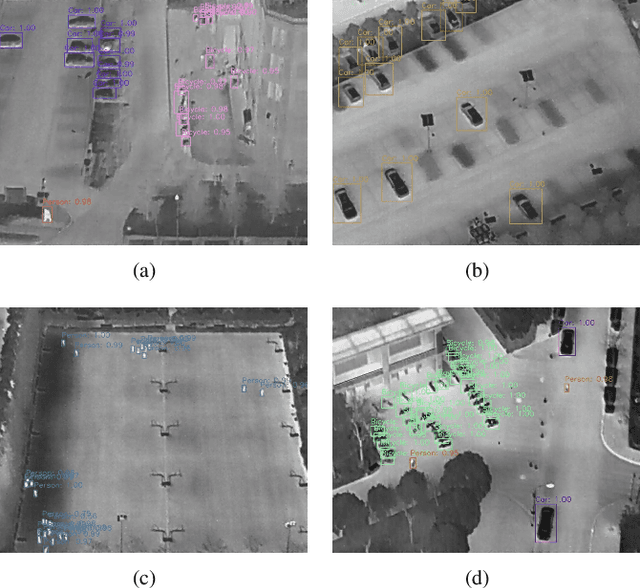
This paper presents a High-altitude infrared thermal dataset, HIT-UAV, for object detection applications on Unmanned Aerial Vehicles (UAVs). HIT-UAV contains 2898 infrared thermal images extracted from 43470 frames. These images are collected by UAV from schools, parking lots, roads, playgrounds, etc. HIT-UAV provides different flight data for each place, including flight altitude (from 60 to 130 meters), camera perspective (from 30 to 90 degrees), date, and daylight intensity. For each image, the HIT-UAV manual annotates object instances with two types of the bounding box (oriented and standard) to address the challenge that object instances have a significant overlap in aerial images. To the best of our knowledge, HIT-UAV is the first publicly available high-altitude infrared thermal UAV dataset for persons and vehicles detection. Moreover, we trained and evaluated the benchmark detection algorithms (YOLOv4 and YOLOv4-tiny) on HIT-UAV. Compared to the visual light dataset, the detection algorithms have excellent performance on HIT-UAV because the infrared thermal images do not contain a significant quantity of irrelevant information with detection objects. This indicates that infrared thermal datasets can significantly promote the development of object detection applications. We hope HIT-UAV contributes to UAV applications such as traffic surveillance and city monitoring at night. The dataset is available at https://github.com/suojiashun/HIT-UAV-Infrared-Thermal-Dataset.
Implications of Human Irrationality for Reinforcement Learning
Jun 07, 2020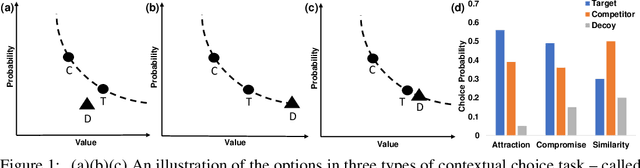
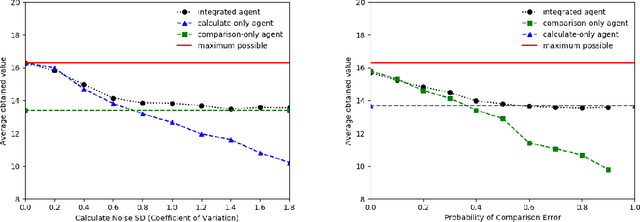

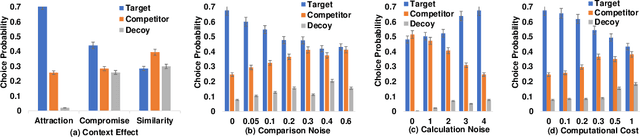
Recent work in the behavioural sciences has begun to overturn the long-held belief that human decision making is irrational, suboptimal and subject to biases. This turn to the rational suggests that human decision making may be a better source of ideas for constraining how machine learning problems are defined than would otherwise be the case. One promising idea concerns human decision making that is dependent on apparently irrelevant aspects of the choice context. Previous work has shown that by taking into account choice context and making relational observations, people can maximize expected value. Other work has shown that Partially observable Markov decision processes (POMDPs) are a useful way to formulate human-like decision problems. Here, we propose a novel POMDP model for contextual choice tasks and show that, despite the apparent irrationalities, a reinforcement learner can take advantage of the way that humans make decisions. We suggest that human irrationalities may offer a productive source of inspiration for improving the design of AI architectures and machine learning methods.