 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGemini 1.5: Unlocking multimodal understanding across millions of tokens of context
Mar 08, 2024In this report, we present the latest model of the Gemini family, Gemini 1.5 Pro, a highly compute-efficient multimodal mixture-of-experts model capable of recalling and reasoning over fine-grained information from millions of tokens of context, including multiple long documents and hours of video and audio. Gemini 1.5 Pro achieves near-perfect recall on long-context retrieval tasks across modalities, improves the state-of-the-art in long-document QA, long-video QA and long-context ASR, and matches or surpasses Gemini 1.0 Ultra's state-of-the-art performance across a broad set of benchmarks. Studying the limits of Gemini 1.5 Pro's long-context ability, we find continued improvement in next-token prediction and near-perfect retrieval (>99%) up to at least 10M tokens, a generational leap over existing models such as Claude 2.1 (200k) and GPT-4 Turbo (128k). Finally, we highlight surprising new capabilities of large language models at the frontier; when given a grammar manual for Kalamang, a language with fewer than 200 speakers worldwide, the model learns to translate English to Kalamang at a similar level to a person who learned from the same content.
Categorical Deep Learning: An Algebraic Theory of Architectures
Feb 23, 2024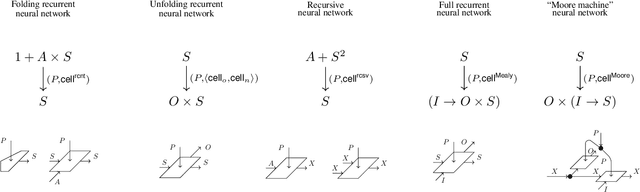
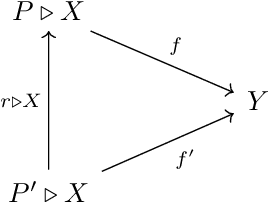
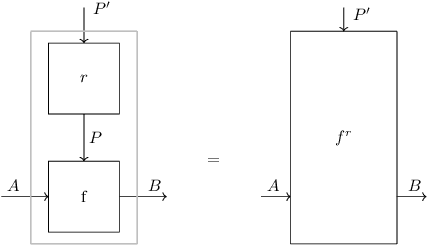
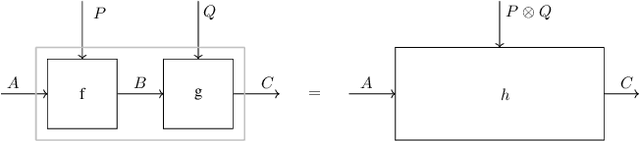
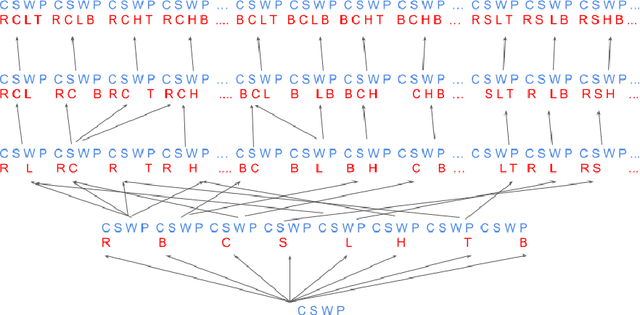
We present our position on the elusive quest for a general-purpose framework for specifying and studying deep learning architectures. Our opinion is that the key attempts made so far lack a coherent bridge between specifying constraints which models must satisfy and specifying their implementations. Focusing on building a such a bridge, we propose to apply category theory -- precisely, the universal algebra of monads valued in a 2-category of parametric maps -- as a single theory elegantly subsuming both of these flavours of neural network design. To defend our position, we show how this theory recovers constraints induced by geometric deep learning, as well as implementations of many architectures drawn from the diverse landscape of neural networks, such as RNNs. We also illustrate how the theory naturally encodes many standard constructs in computer science and automata theory.
Gemini: A Family of Highly Capable Multimodal Models
Dec 19, 2023This report introduces a new family of multimodal models, Gemini, that exhibit remarkable capabilities across image, audio, video, and text understanding. The Gemini family consists of Ultra, Pro, and Nano sizes, suitable for applications ranging from complex reasoning tasks to on-device memory-constrained use-cases. Evaluation on a broad range of benchmarks shows that our most-capable Gemini Ultra model advances the state of the art in 30 of 32 of these benchmarks - notably being the first model to achieve human-expert performance on the well-studied exam benchmark MMLU, and improving the state of the art in every one of the 20 multimodal benchmarks we examined. We believe that the new capabilities of Gemini models in cross-modal reasoning and language understanding will enable a wide variety of use cases and we discuss our approach toward deploying them responsibly to users.
Asynchronous Algorithmic Alignment with Cocycles
Jun 28, 2023State-of-the-art neural algorithmic reasoners make use of message passing in graph neural networks (GNNs). But typical GNNs blur the distinction between the definition and invocation of the message function, forcing a node to send messages to its neighbours at every layer, synchronously. When applying GNNs to learn to execute dynamic programming algorithms, however, on most steps only a handful of the nodes would have meaningful updates to send. One, hence, runs the risk of inefficiencies by sending too much irrelevant data across the graph -- with many intermediate GNN steps having to learn identity functions. In this work, we explicitly separate the concepts of node state update and message function invocation. With this separation, we obtain a mathematical formulation that allows us to reason about asynchronous computation in both algorithms and neural networks.
Improving Multimodal Interactive Agents with Reinforcement Learning from Human Feedback
Nov 21, 2022An important goal in artificial intelligence is to create agents that can both interact naturally with humans and learn from their feedback. Here we demonstrate how to use reinforcement learning from human feedback (RLHF) to improve upon simulated, embodied agents trained to a base level of competency with imitation learning. First, we collected data of humans interacting with agents in a simulated 3D world. We then asked annotators to record moments where they believed that agents either progressed toward or regressed from their human-instructed goal. Using this annotation data we leveraged a novel method - which we call "Inter-temporal Bradley-Terry" (IBT) modelling - to build a reward model that captures human judgments. Agents trained to optimise rewards delivered from IBT reward models improved with respect to all of our metrics, including subsequent human judgment during live interactions with agents. Altogether our results demonstrate how one can successfully leverage human judgments to improve agent behaviour, allowing us to use reinforcement learning in complex, embodied domains without programmatic reward functions. Videos of agent behaviour may be found at https://youtu.be/v_Z9F2_eKk4.
Evaluating Multimodal Interactive Agents
May 26, 2022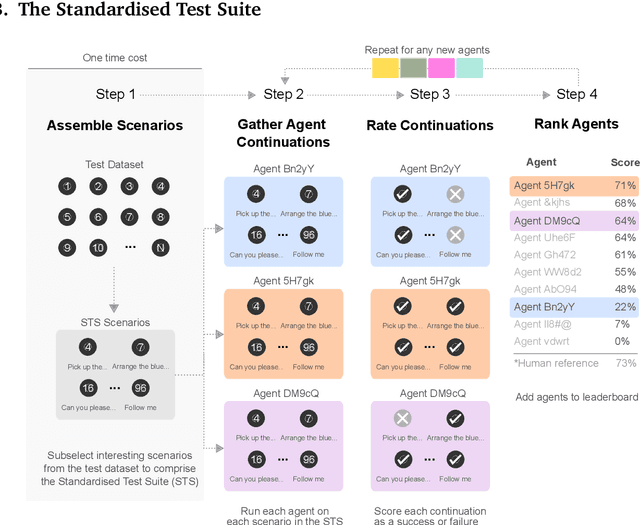

Creating agents that can interact naturally with humans is a common goal in artificial intelligence (AI) research. However, evaluating these interactions is challenging: collecting online human-agent interactions is slow and expensive, yet faster proxy metrics often do not correlate well with interactive evaluation. In this paper, we assess the merits of these existing evaluation metrics and present a novel approach to evaluation called the Standardised Test Suite (STS). The STS uses behavioural scenarios mined from real human interaction data. Agents see replayed scenario context, receive an instruction, and are then given control to complete the interaction offline. These agent continuations are recorded and sent to human annotators to mark as success or failure, and agents are ranked according to the proportion of continuations in which they succeed. The resulting STS is fast, controlled, interpretable, and representative of naturalistic interactions. Altogether, the STS consolidates much of what is desirable across many of our standard evaluation metrics, allowing us to accelerate research progress towards producing agents that can interact naturally with humans. https://youtu.be/YR1TngGORGQ
Creating Multimodal Interactive Agents with Imitation and Self-Supervised Learning
Dec 07, 2021
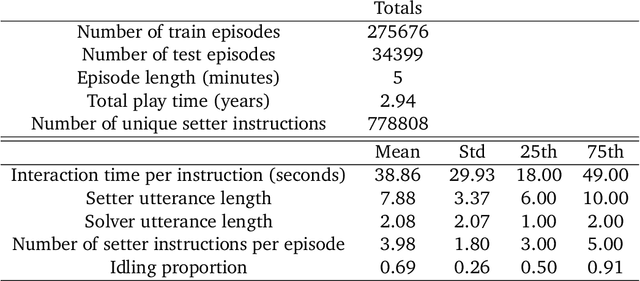
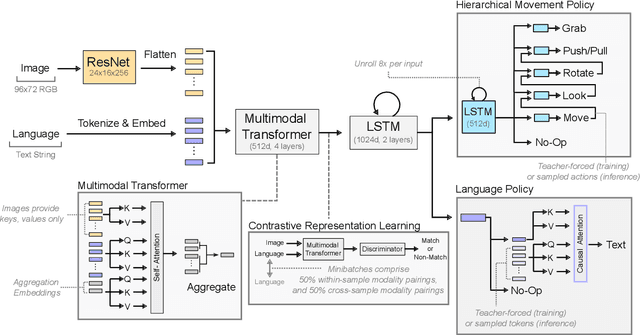
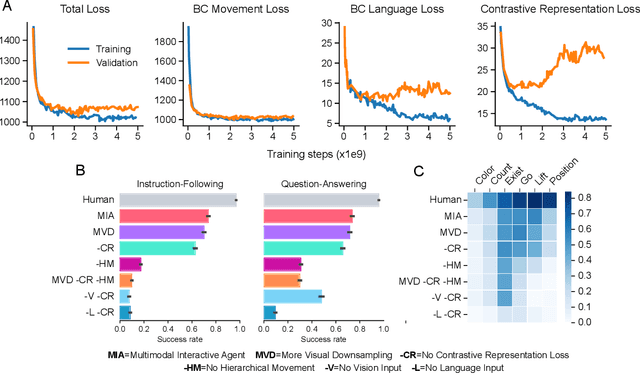
A common vision from science fiction is that robots will one day inhabit our physical spaces, sense the world as we do, assist our physical labours, and communicate with us through natural language. Here we study how to design artificial agents that can interact naturally with humans using the simplification of a virtual environment. We show that imitation learning of human-human interactions in a simulated world, in conjunction with self-supervised learning, is sufficient to produce a multimodal interactive agent, which we call MIA, that successfully interacts with non-adversarial humans 75% of the time. We further identify architectural and algorithmic techniques that improve performance, such as hierarchical action selection. Altogether, our results demonstrate that imitation of multi-modal, real-time human behaviour may provide a straightforward and surprisingly effective means of imbuing agents with a rich behavioural prior from which agents might then be fine-tuned for specific purposes, thus laying a foundation for training capable agents for interactive robots or digital assistants. A video of MIA's behaviour may be found at https://youtu.be/ZFgRhviF7mY
Formalising Concepts as Grounded Abstractions
Jan 13, 2021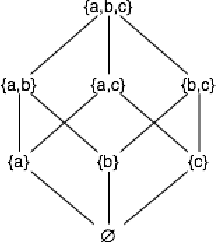
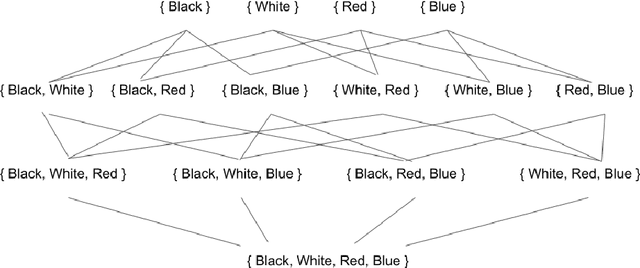
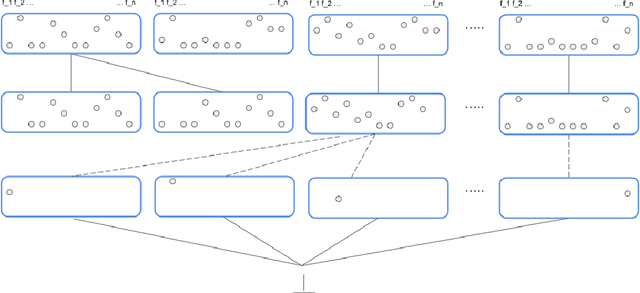
The notion of concept has been studied for centuries, by philosophers, linguists, cognitive scientists, and researchers in artificial intelligence (Margolis & Laurence, 1999). There is a large literature on formal, mathematical models of concepts, including a whole sub-field of AI -- Formal Concept Analysis -- devoted to this topic (Ganter & Obiedkov, 2016). Recently, researchers in machine learning have begun to investigate how methods from representation learning can be used to induce concepts from raw perceptual data (Higgins, Sonnerat, et al., 2018). The goal of this report is to provide a formal account of concepts which is compatible with this latest work in deep learning. The main technical goal of this report is to show how techniques from representation learning can be married with a lattice-theoretic formulation of conceptual spaces. The mathematics of partial orders and lattices is a standard tool for modelling conceptual spaces (Ch.2, Mitchell (1997), Ganter and Obiedkov (2016)); however, there is no formal work that we are aware of which defines a conceptual lattice on top of a representation that is induced using unsupervised deep learning (Goodfellow et al., 2016). The advantages of partially-ordered lattice structures are that these provide natural mechanisms for use in concept discovery algorithms, through the meets and joins of the lattice.
Grounded Language Learning Fast and Slow
Sep 15, 2020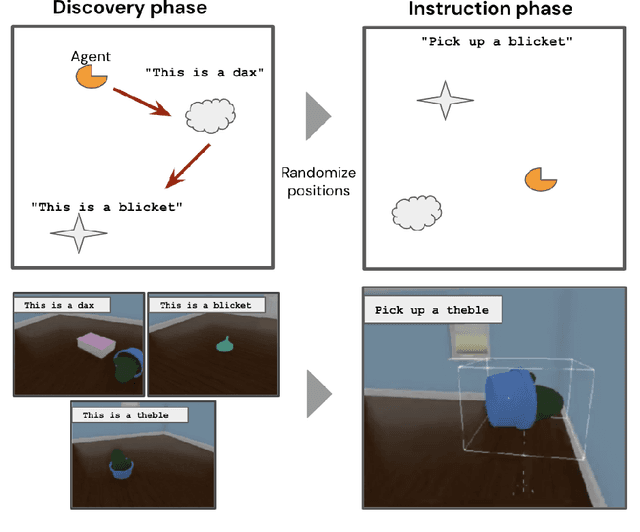
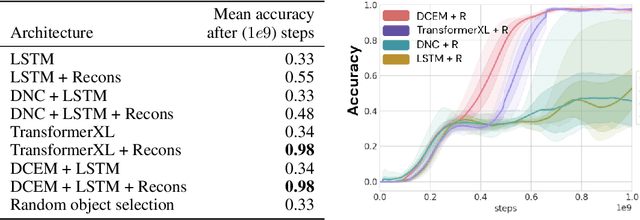
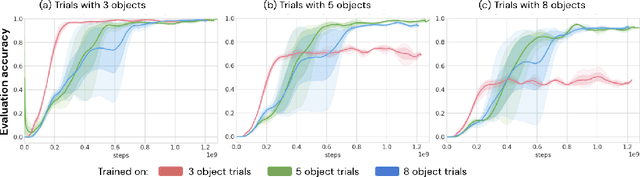
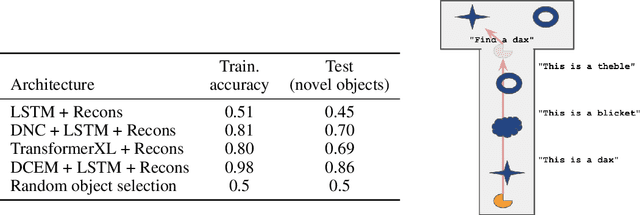
Recent work has shown that large text-based neural language models, trained with conventional supervised learning objectives, acquire a surprising propensity for few- and one-shot learning. Here, we show that an embodied agent situated in a simulated 3D world, and endowed with a novel dual-coding external memory, can exhibit similar one-shot word learning when trained with conventional reinforcement learning algorithms. After a single introduction to a novel object via continuous visual perception and a language prompt ("This is a dax"), the agent can re-identify the object and manipulate it as instructed ("Put the dax on the bed"). In doing so, it seamlessly integrates short-term, within-episode knowledge of the appropriate referent for the word "dax" with long-term lexical and motor knowledge acquired across episodes (i.e. "bed" and "putting"). We find that, under certain training conditions and with a particular memory writing mechanism, the agent's one-shot word-object binding generalizes to novel exemplars within the same ShapeNet category, and is effective in settings with unfamiliar numbers of objects. We further show how dual-coding memory can be exploited as a signal for intrinsic motivation, stimulating the agent to seek names for objects that may be useful for later executing instructions. Together, the results demonstrate that deep neural networks can exploit meta-learning, episodic memory and an explicitly multi-modal environment to account for 'fast-mapping', a fundamental pillar of human cognitive development and a potentially transformative capacity for agents that interact with human users.