 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnhancing Lifelong Multi-Agent Path Finding with Cache Mechanism
Jan 06, 2025



Multi-Agent Path Finding (MAPF), which focuses on finding collision-free paths for multiple robots, is crucial in autonomous warehouse operations. Lifelong MAPF (L-MAPF), where agents are continuously reassigned new targets upon completing their current tasks, offers a more realistic approximation of real-world warehouse scenarios. While cache storage systems can enhance efficiency and reduce operational costs, existing approaches primarily rely on expectations and mathematical models, often without adequately addressing the challenges of multi-robot planning and execution. In this paper, we introduce a novel mechanism called Lifelong MAPF with Cache Mechanism (L-MAPF-CM), which integrates high-level cache storage with low-level path planning. We have involved a new type of map grid called cache for temporary item storage. Additionally, we involved a task assigner (TA) with a locking mechanism to bridge the gap between the new cache grid and L-MAPF algorithm. The TA dynamically allocates target locations to agents based on their status in various scenarios. We evaluated L-MAPF-CM using different cache replacement policies and task distributions. L-MAPF-CM has demonstrated performance improvements particularly with high cache hit rates and smooth traffic conditions.
Caching-Augmented Lifelong Multi-Agent Path Finding
Mar 29, 2024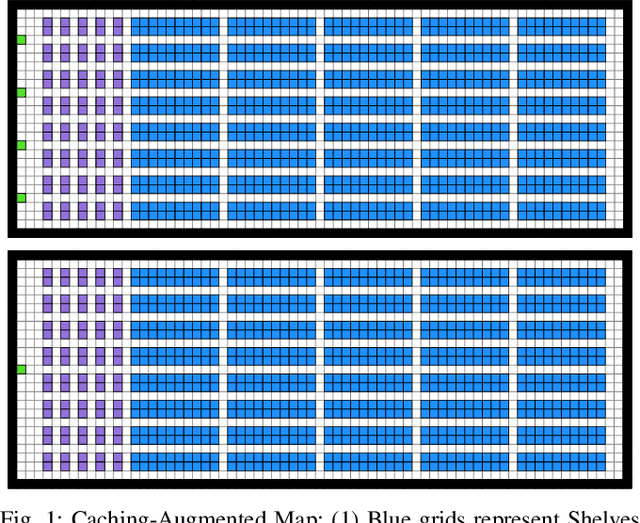

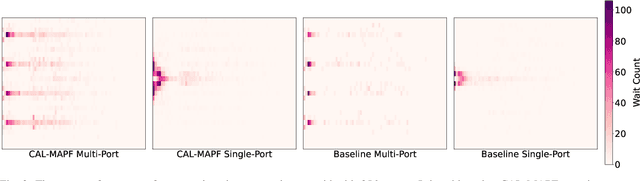
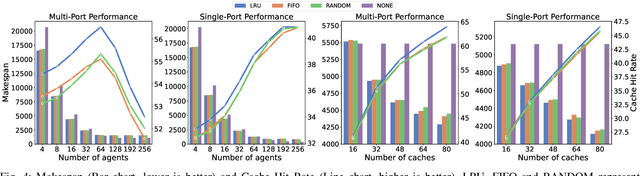
Multi-Agent Path Finding (MAPF), which involves finding collision-free paths for multiple robots, is crucial in various applications. Lifelong MAPF, where targets are reassigned to agents as soon as they complete their initial targets, offers a more accurate approximation of real-world warehouse planning. In this paper, we present a novel mechanism named Caching-Augmented Lifelong MAPF (CAL-MAPF), designed to improve the performance of Lifelong MAPF. We have developed a new type of map grid called cache for temporary item storage and replacement, and designed a locking mechanism for it to improve the stability of the planning solution. This cache mechanism was evaluated using various cache replacement policies and a spectrum of input task distributions. We identified three main factors significantly impacting CAL-MAPF performance through experimentation: suitable input task distribution, high cache hit rate, and smooth traffic. In general, CAL-MAPF has demonstrated potential for performance improvements in certain task distributions, maps, and agent configurations.
FastMapSVM: Classifying Complex Objects Using the FastMap Algorithm and Support-Vector Machines
Apr 07, 2022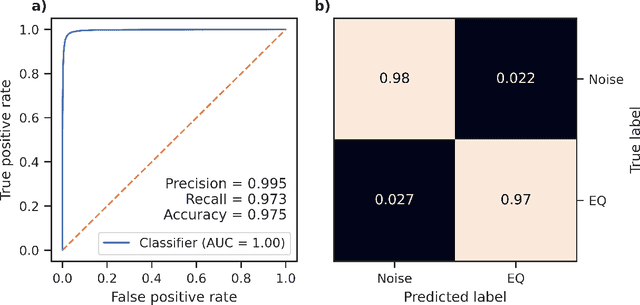

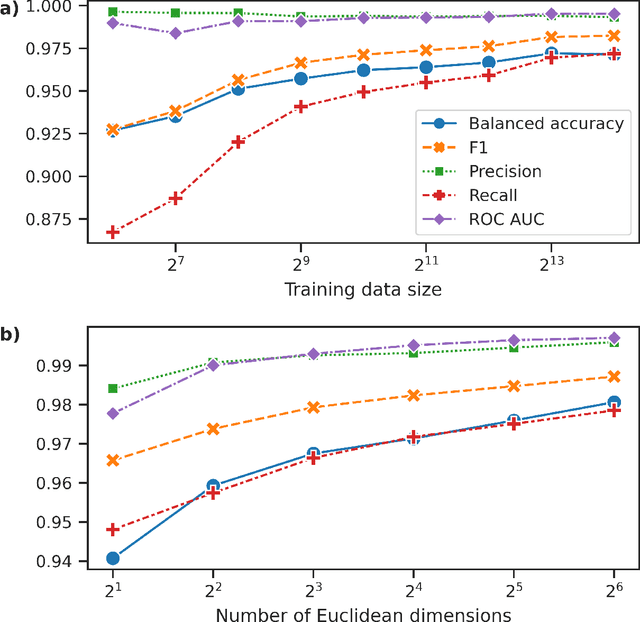
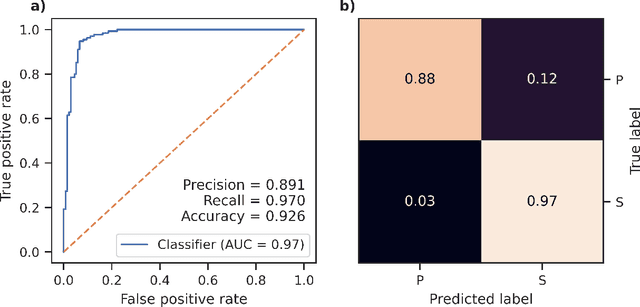
Neural Networks and related Deep Learning methods are currently at the leading edge of technologies used for classifying objects. However, they generally demand large amounts of time and data for model training; and their learned models can sometimes be difficult to interpret. In this paper, we present FastMapSVM, a novel interpretable Machine Learning framework for classifying complex objects. FastMapSVM combines the strengths of FastMap and Support-Vector Machines. FastMap is an efficient linear-time algorithm that maps complex objects to points in a Euclidean space, while preserving pairwise non-Euclidean distances between them. We demonstrate the efficiency and effectiveness of FastMapSVM in the context of classifying seismograms. We show that its performance, in terms of precision, recall, and accuracy, is comparable to that of other state-of-the-art methods. However, compared to other methods, FastMapSVM uses significantly smaller amounts of time and data for model training. It also provides a perspicuous visualization of the objects and the classification boundaries between them. We expect FastMapSVM to be viable for classification tasks in many other real-world domains.
Embedding Directed Graphs in Potential Fields Using FastMap-D
Jun 04, 2020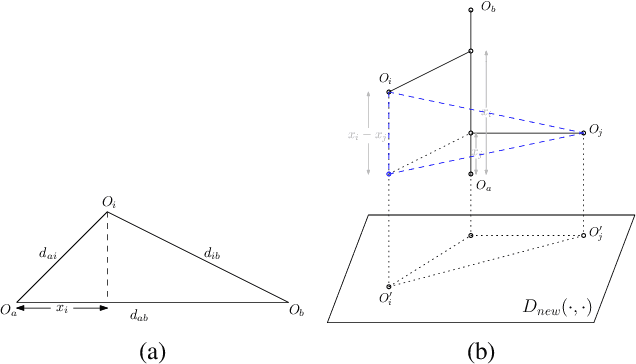
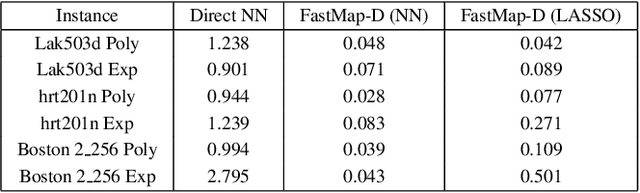
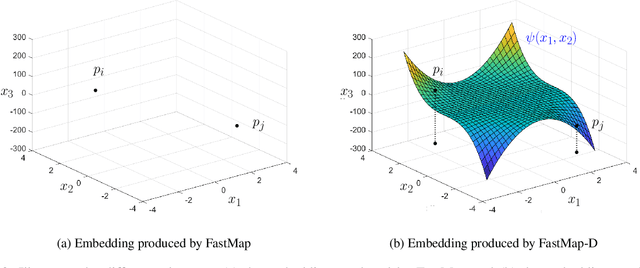
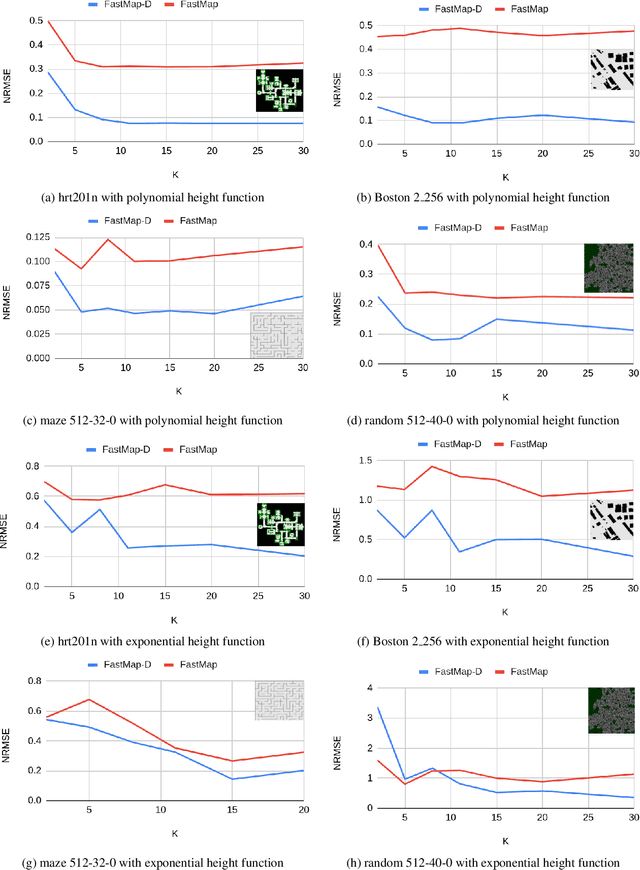
Embedding undirected graphs in a Euclidean space has many computational benefits. FastMap is an efficient embedding algorithm that facilitates a geometric interpretation of problems posed on undirected graphs. However, Euclidean distances are inherently symmetric and, thus, Euclidean embeddings cannot be used for directed graphs. In this paper, we present FastMap-D, an efficient generalization of FastMap to directed graphs. FastMap-D embeds vertices using a potential field to capture the asymmetry between the pairwise distances in directed graphs. FastMap-D learns a potential function to define the potential field using a machine learning module. In experiments on various kinds of directed graphs, we demonstrate the advantage of FastMap-D over other approaches.
* 9 pages, Published in Symposium on Combinatorial Search(SoCS-2020). Erratum with updated Results
Lifelong Multi-Agent Path Finding in Large-Scale Warehouses
May 15, 2020

Multi-Agent Path Finding (MAPF) is the problem of moving a team of agents to their goal locations without collisions. In this paper, we study the lifelong variant of MAPF where agents are constantly engaged with new goal locations, such as in large-scale warehouses. We propose a new framework for solving lifelong MAPF by decomposing the problem into a sequence of Windowed MAPF instances, where a Windowed MAPF solver resolves collisions among the paths of the agents only within a finite time horizon and ignores collisions beyond it. Our framework is particularly well suited to generating pliable plans that adapt to continually arriving new goal locations. Theoretically, we analyze the advantages and disadvantages of our framework. Empirically, we evaluate our framework with a variety of MAPF solvers and show that it can produce high-quality solutions for up to 1,000 agents, significantly outperforming existing methods.
Idle Time Optimization for Target Assignment and Path Finding in Sortation Centers
Nov 30, 2019
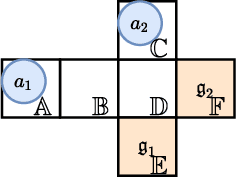
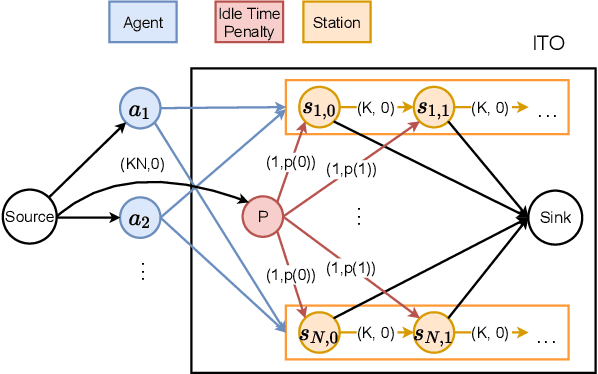
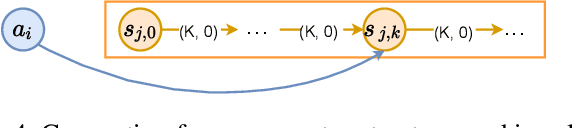
In this paper, we study the one-shot and lifelong versions of the Target Assignment and Path Finding problem in automated sortation centers, where each agent needs to constantly assign itself a sorting station, move to its assigned station without colliding with obstacles or other agents, wait in the queue of that station to obtain a parcel for delivery, and then deliver the parcel to a sorting bin. The throughput of such centers is largely determined by the total idle time of all stations since their queues can frequently become empty. To address this problem, we first formalize and study the one-shot version that assigns stations to a set of agents and finds collision-free paths for the agents to their assigned stations. We present efficient algorithms for this task based on a novel min-cost max-flow formulation that minimizes the total idle time of all stations in a fixed time window. We then demonstrate how our algorithms for solving the one-shot problem can be applied to solving the lifelong problem as well. Experimentally, we believe to be the first researchers to consider real-world automated sortation centers using an industrial simulator with realistic data and a kinodynamic model of real robots. On this simulator, we showcase the benefits of our algorithms by demonstrating their efficiency and effectiveness for up to 350 agents.
Multi-Agent Path Finding with Capacity Constraints
Jul 21, 2019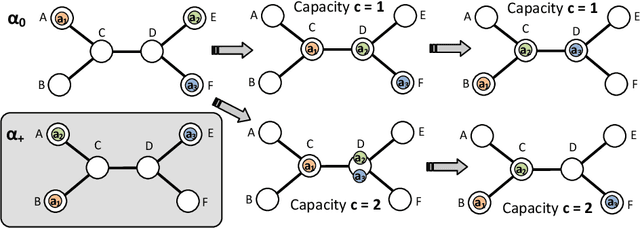
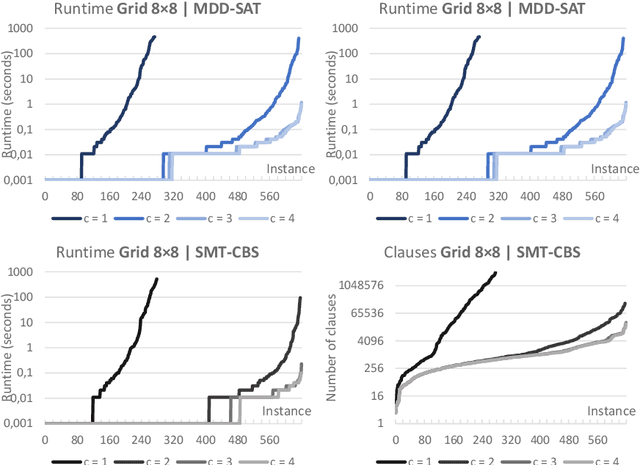
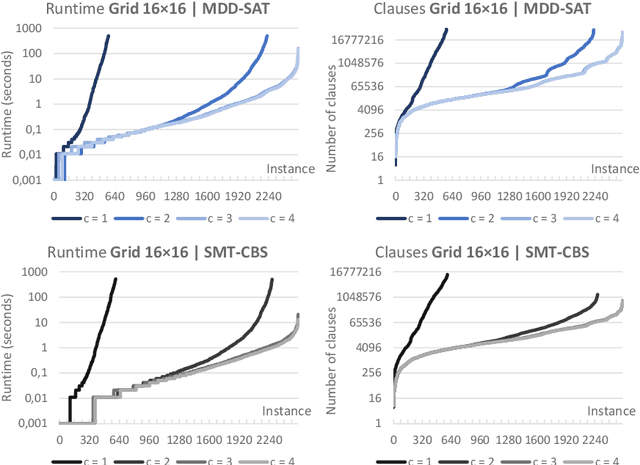
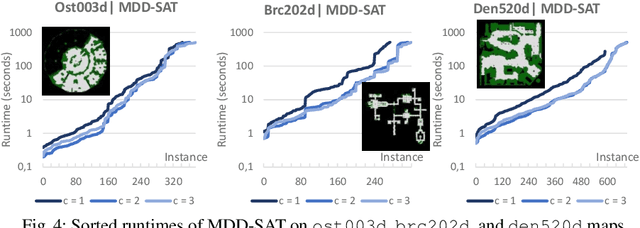
In multi-agent path finding (MAPF) the task is to navigate agents from their starting positions to given individual goals. The problem takes place in an undirected graph whose vertices represent positions and edges define the topology. Agents can move to neighbor vertices across edges. In the standard MAPF, space occupation by agents is modeled by a capacity constraint that permits at most one agent per vertex. We suggest an extension of MAPF in this paper that permits more than one agent per vertex. Propositional satisfiability (SAT) models for these extensions of MAPF are studied. We focus on modeling capacity constraints in SAT-based formulations of MAPF and evaluation of performance of these models. We extend two existing SAT-based formulations with vertex capacity constraints: MDD-SAT and SMT-CBS where the former is an approach that builds the model in an eager way while the latter relies on lazy construction of the model.
Multi-Agent Pathfinding: Definitions, Variants, and Benchmarks
Jun 19, 2019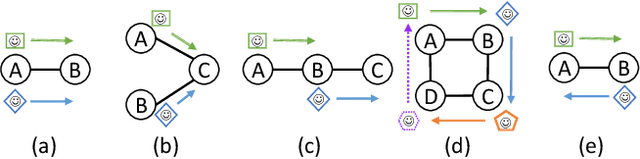
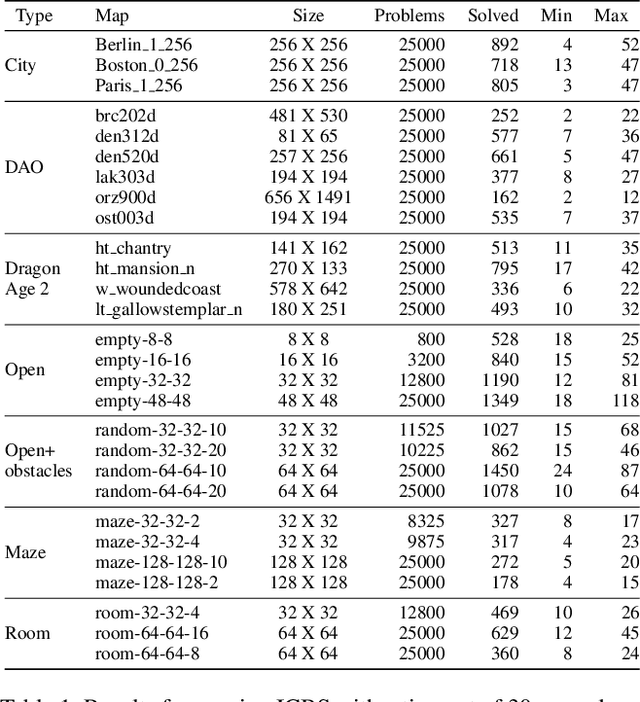
The MAPF problem is the fundamental problem of planning paths for multiple agents, where the key constraint is that the agents will be able to follow these paths concurrently without colliding with each other. Applications of MAPF include automated warehouses and autonomous vehicles. Research on MAPF has been flourishing in the past couple of years. Different MAPF research papers make different assumptions, e.g., whether agents can traverse the same road at the same time, and have different objective functions, e.g., minimize makespan or sum of agents' actions costs. These assumptions and objectives are sometimes implicitly assumed or described informally. This makes it difficult to establish appropriate baselines for comparison in research papers, as well as making it difficult for practitioners to find the papers relevant to their concrete application. This paper aims to fill this gap and support researchers and practitioners by providing a unifying terminology for describing common MAPF assumptions and objectives. In addition, we also provide pointers to two MAPF benchmarks. In particular, we introduce a new grid-based benchmark for MAPF, and demonstrate experimentally that it poses a challenge to contemporary MAPF algorithms.
PRIMAL: Pathfinding via Reinforcement and Imitation Multi-Agent Learning
Feb 20, 2019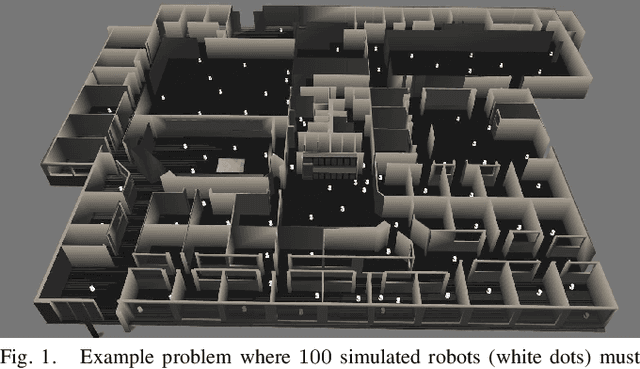
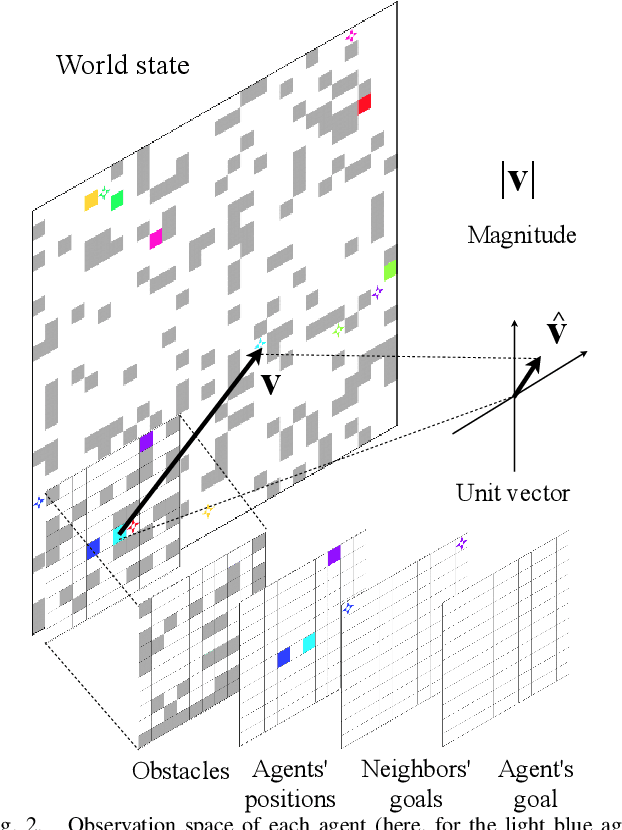
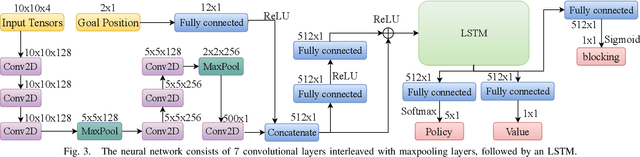
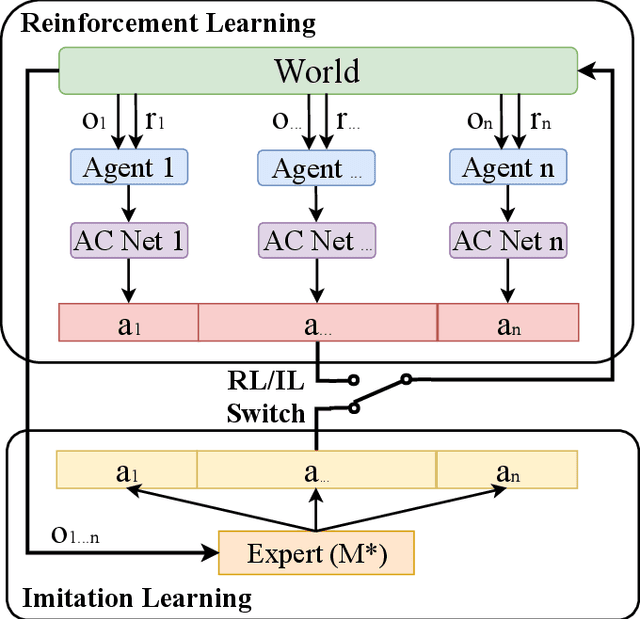
Multi-agent path finding (MAPF) is an essential component of many large-scale, real-world robot deployments, from aerial swarms to warehouse automation. However, despite the community's continued efforts, most state-of-the-art MAPF planners still rely on centralized planning and scale poorly past a few hundred agents. Such planning approaches are maladapted to real-world deployments, where noise and uncertainty often require paths be recomputed online, which is impossible when planning times are in seconds to minutes. We present PRIMAL, a novel framework for MAPF that combines reinforcement and imitation learning to teach fully-decentralized policies, where agents reactively plan paths online in a partially-observable world while exhibiting implicit coordination. This framework extends our previous work on distributed learning of collaborative policies by introducing demonstrations of an expert MAPF planner during training, as well as careful reward shaping and environment sampling. Once learned, the resulting policy can be copied onto any number of agents and naturally scales to different team sizes and world dimensions. We present results on randomized worlds with up to 1024 agents and compare success rates against state-of-the-art MAPF planners. Finally, we experimentally validate the learned policies in a hybrid simulation of a factory mockup, involving both real-world and simulated robots.
Lifelong Path Planning with Kinematic Constraints for Multi-Agent Pickup and Delivery
Dec 15, 2018
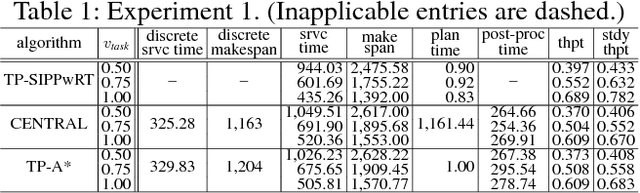

The Multi-Agent Pickup and Delivery (MAPD) problem models applications where a large number of agents attend to a stream of incoming pickup-and-delivery tasks. Token Passing (TP) is a recent MAPD algorithm that is efficient and effective. We make TP even more efficient and effective by using a novel combinatorial search algorithm, called Safe Interval Path Planning with Reservation Table (SIPPwRT), for single-agent path planning. SIPPwRT uses an advanced data structure that allows for fast updates and lookups of the current paths of all agents in an online setting. The resulting MAPD algorithm TP-SIPPwRT takes kinematic constraints of real robots into account directly during planning, computes continuous agent movements with given velocities that work on non-holonomic robots rather than discrete agent movements with uniform velocity, and is complete for well-formed MAPD instances. We demonstrate its benefits for automated warehouses using both an agent simulator and a standard robot simulator. For example, we demonstrate that it can compute paths for hundreds of agents and thousands of tasks in seconds and is more efficient and effective than existing MAPD algorithms that use a post-processing step to adapt their paths to continuous agent movements with given velocities.