 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeJudgelight: Trajectory-Level Post-Optimization for Multi-Agent Path Finding via Closed-Subwalk Collapsing
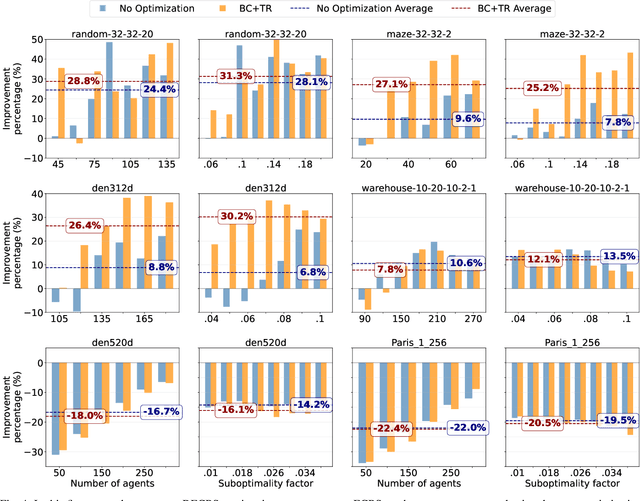
Jan 27, 2026Multi-Agent Path Finding (MAPF) is an NP-hard problem with applications in warehouse automation and multi-robot coordination. Learning-based MAPF solvers offer fast and scalable planning but often produce feasible trajectories that contain unnecessary or oscillatory movements. We propose Judgelight, a post-optimization method that improves trajectory quality after a MAPF solver generates a feasible schedule. Judgelight collapses closed subwalks in agents' trajectories to remove redundant movements while preserving all feasibility constraints. We formalize this process as MAPF-Collapse, prove that it is NP-hard, and present an exact optimization approach by formulating it as integer linear programming (ILP) problem. Experimental results show Judgelight consistently reduces solution cost by around 20%, particularly for learning-based solvers, producing trajectories that are better suited for real-world deployment.
RAILGUN: A Unified Convolutional Policy for Multi-Agent Path Finding Across Different Environments and Tasks
Mar 04, 2025



Multi-Agent Path Finding (MAPF), which focuses on finding collision-free paths for multiple robots, is crucial for applications ranging from aerial swarms to warehouse automation. Solving MAPF is NP-hard so learning-based approaches for MAPF have gained attention, particularly those leveraging deep neural networks. Nonetheless, despite the community's continued efforts, all learning-based MAPF planners still rely on decentralized planning due to variability in the number of agents and map sizes. We have developed the first centralized learning-based policy for MAPF problem called RAILGUN. RAILGUN is not an agent-based policy but a map-based policy. By leveraging a CNN-based architecture, RAILGUN can generalize across different maps and handle any number of agents. We collect trajectories from rule-based methods to train our model in a supervised way. In experiments, RAILGUN outperforms most baseline methods and demonstrates great zero-shot generalization capabilities on various tasks, maps and agent numbers that were not seen in the training dataset.
Accelerating Focal Search in Multi-Agent Path Finding with Tighter Lower Bounds
Mar 04, 2025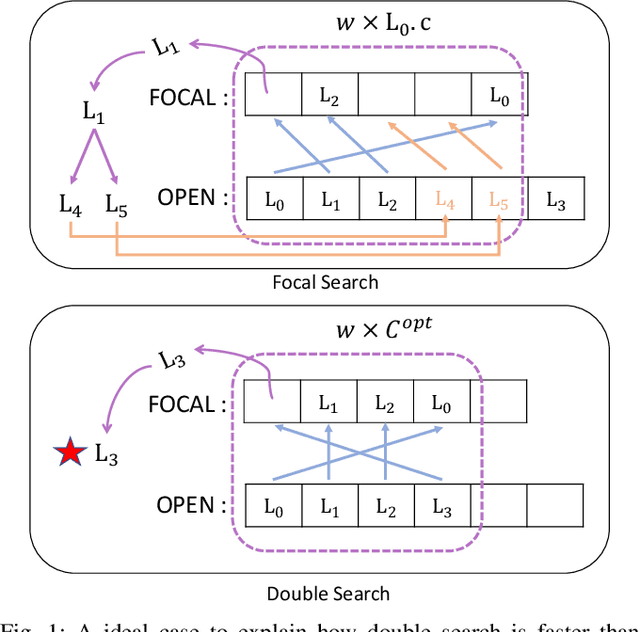


Multi-Agent Path Finding (MAPF) involves finding collision-free paths for multiple agents while minimizing a cost function--an NP-hard problem. Bounded suboptimal methods like Enhanced Conflict-Based Search (ECBS) and Explicit Estimation CBS (EECBS) balance solution quality with computational efficiency using focal search mechanisms. While effective, traditional focal search faces a limitation: the lower bound (LB) value determining which nodes enter the FOCAL list often increases slowly in early search stages, resulting in a constrained search space that delays finding valid solutions. In this paper, we propose a novel bounded suboptimal algorithm, double-ECBS (DECBS), to address this issue by first determining the maximum LB value and then employing a best-first search guided by this LB to find a collision-free path. Experimental results demonstrate that DECBS outperforms ECBS in most test cases and is compatible with existing optimization techniques. DECBS can reduce nearly 30% high-level CT nodes and 50% low-level focal search nodes. When agent density is moderate to high, DECBS achieves a 23.5% average runtime improvement over ECBS with identical suboptimality bounds and optimizations.
Enhancing Lifelong Multi-Agent Path Finding with Cache Mechanism
Jan 06, 2025



Multi-Agent Path Finding (MAPF), which focuses on finding collision-free paths for multiple robots, is crucial in autonomous warehouse operations. Lifelong MAPF (L-MAPF), where agents are continuously reassigned new targets upon completing their current tasks, offers a more realistic approximation of real-world warehouse scenarios. While cache storage systems can enhance efficiency and reduce operational costs, existing approaches primarily rely on expectations and mathematical models, often without adequately addressing the challenges of multi-robot planning and execution. In this paper, we introduce a novel mechanism called Lifelong MAPF with Cache Mechanism (L-MAPF-CM), which integrates high-level cache storage with low-level path planning. We have involved a new type of map grid called cache for temporary item storage. Additionally, we involved a task assigner (TA) with a locking mechanism to bridge the gap between the new cache grid and L-MAPF algorithm. The TA dynamically allocates target locations to agents based on their status in various scenarios. We evaluated L-MAPF-CM using different cache replacement policies and task distributions. L-MAPF-CM has demonstrated performance improvements particularly with high cache hit rates and smooth traffic conditions.
Enhancing Long Context Performance in LLMs Through Inner Loop Query Mechanism
Oct 11, 2024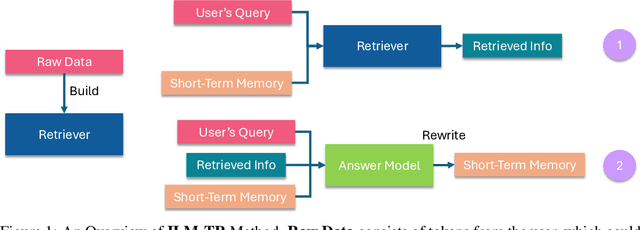
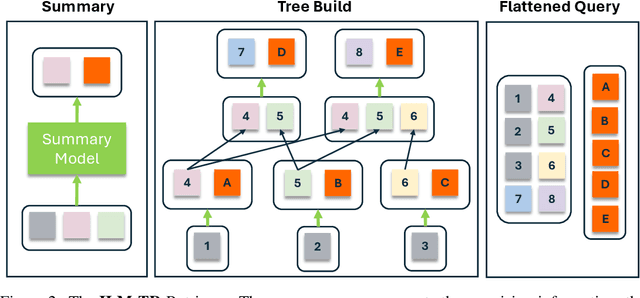
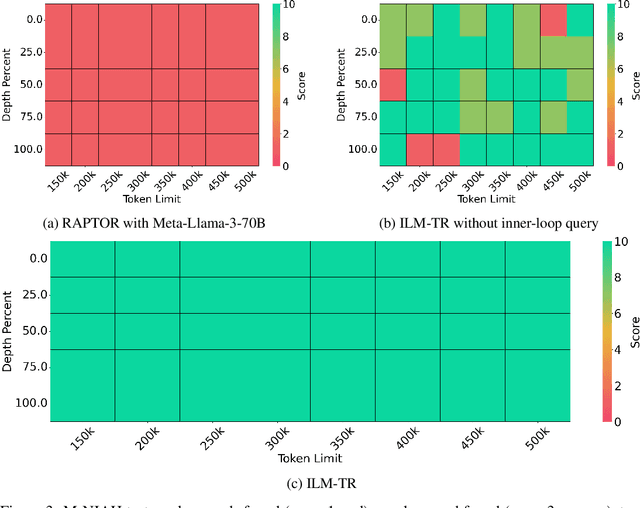
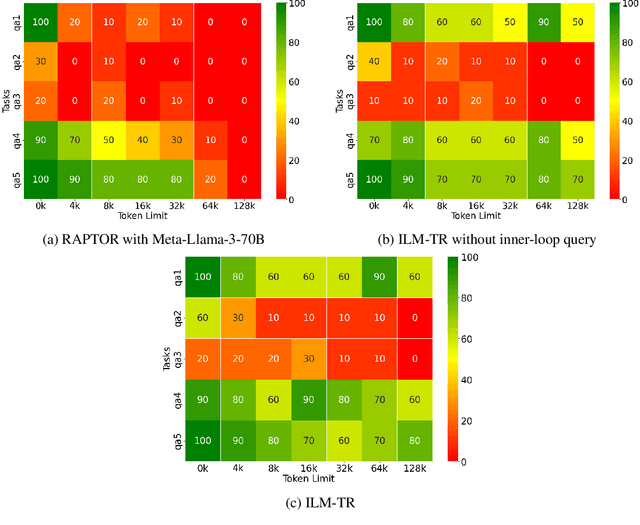
Transformers have a quadratic scaling of computational complexity with input size, which limits the input context window size of large language models (LLMs) in both training and inference. Meanwhile, retrieval-augmented generation (RAG) besed models can better handle longer contexts by using a retrieval system to filter out unnecessary information. However, most RAG methods only perform retrieval based on the initial query, which may not work well with complex questions that require deeper reasoning. We introduce a novel approach, Inner Loop Memory Augmented Tree Retrieval (ILM-TR), involving inner-loop queries, based not only on the query question itself but also on intermediate findings. At inference time, our model retrieves information from the RAG system, integrating data from lengthy documents at various levels of abstraction. Based on the information retrieved, the LLM generates texts stored in an area named Short-Term Memory (STM) which is then used to formulate the next query. This retrieval process is repeated until the text in STM converged. Our experiments demonstrate that retrieval with STM offers improvements over traditional retrieval-augmented LLMs, particularly in long context tests such as Multi-Needle In A Haystack (M-NIAH) and BABILong.
ITA-ECBS: A Bounded-Suboptimal Algorithm for Combined Target-Assignment and Path-Finding Problem
Apr 08, 2024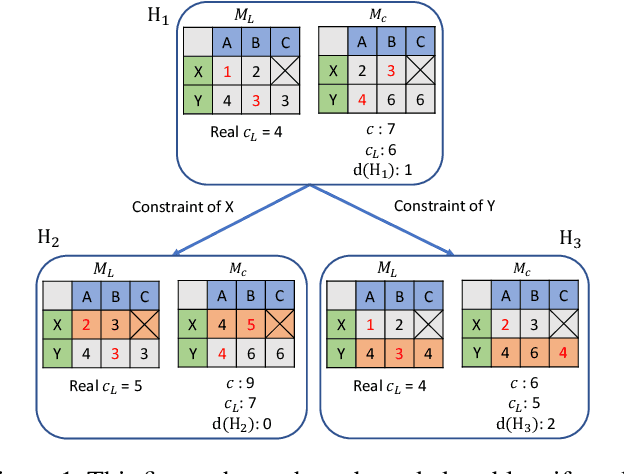

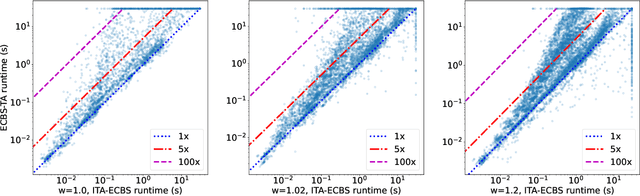

Multi-Agent Path Finding (MAPF), i.e., finding collision-free paths for multiple robots, plays a critical role in many applications. Sometimes, assigning a specific target to each agent also presents a challenge. The Combined Target-Assignment and Path-Finding (TAPF) problem, a variant of MAPF, requires simultaneously assigning targets to agents and planning collision-free paths. Several algorithms, including CBM, CBS-TA, and ITA-CBS, can optimally solve the TAPF problem, with ITA-CBS being the leading method of flowtime. However, the only existing suboptimal method ECBS-TA, is derived from CBS-TA rather than ITA-CBS, and adapting the optimal ITA-CBS method to its bounded-suboptimal variant is a challenge due to the variability of target assignment solutions in different search nodes. We introduce ITA-ECBS as the first bounded-suboptimal variant of ITA-CBS. ITA-ECBS employs focal search to enhance efficiency and determines target assignments based on a new lower bound matrix. We show that ITA-ECBS outperforms the baseline method ECBS-TA in 87.42% of 54,033 test cases.
Caching-Augmented Lifelong Multi-Agent Path Finding
Mar 29, 2024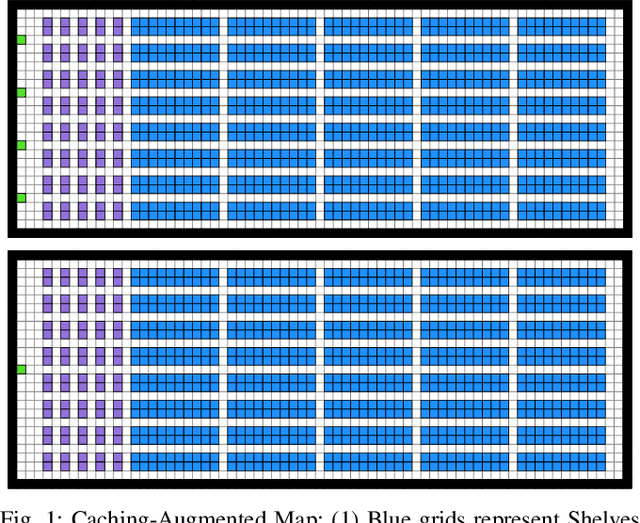

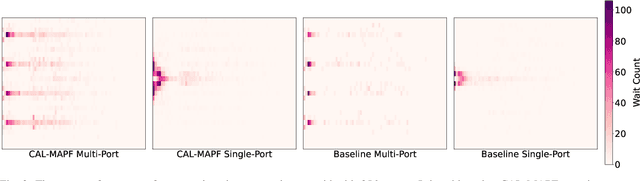
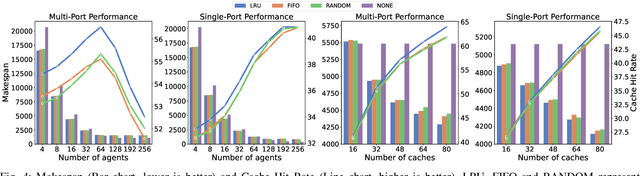
Multi-Agent Path Finding (MAPF), which involves finding collision-free paths for multiple robots, is crucial in various applications. Lifelong MAPF, where targets are reassigned to agents as soon as they complete their initial targets, offers a more accurate approximation of real-world warehouse planning. In this paper, we present a novel mechanism named Caching-Augmented Lifelong MAPF (CAL-MAPF), designed to improve the performance of Lifelong MAPF. We have developed a new type of map grid called cache for temporary item storage and replacement, and designed a locking mechanism for it to improve the stability of the planning solution. This cache mechanism was evaluated using various cache replacement policies and a spectrum of input task distributions. We identified three main factors significantly impacting CAL-MAPF performance through experimentation: suitable input task distribution, high cache hit rate, and smooth traffic. In general, CAL-MAPF has demonstrated potential for performance improvements in certain task distributions, maps, and agent configurations.
Solving Multi-Agent Target Assignment and Path Finding with a Single Constraint Tree
Jul 02, 2023



Combined Target-Assignment and Path-Finding problem (TAPF) requires simultaneously assigning targets to agents and planning collision-free paths for agents from their start locations to their assigned targets. As a leading approach to address TAPF, Conflict-Based Search with Target Assignment (CBS-TA) leverages both K-best target assignments to create multiple search trees and Conflict-Based Search (CBS) to resolve collisions in each search tree. While being able to find an optimal solution, CBS-TA suffers from scalability due to the duplicated collision resolution in multiple trees and the expensive computation of K-best assignments. We therefore develop Incremental Target Assignment CBS (ITA-CBS) to bypass these two computational bottlenecks. ITA-CBS generates only a single search tree and avoids computing K-best assignments by incrementally computing new 1-best assignments during the search. We show that, in theory, ITA-CBS is guaranteed to find an optimal solution and, in practice, is computationally efficient.
Multi-modal Transfer Learning for Grasping Transparent and Specular Objects
May 29, 2020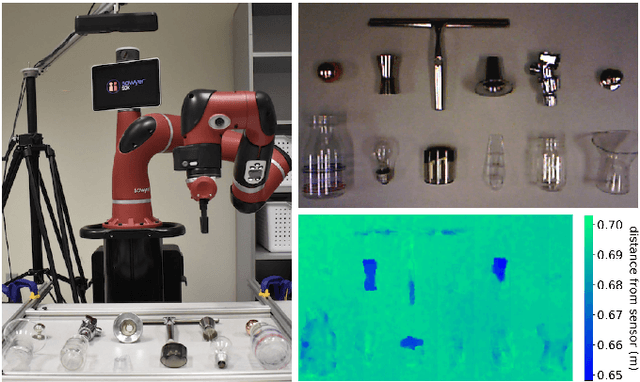
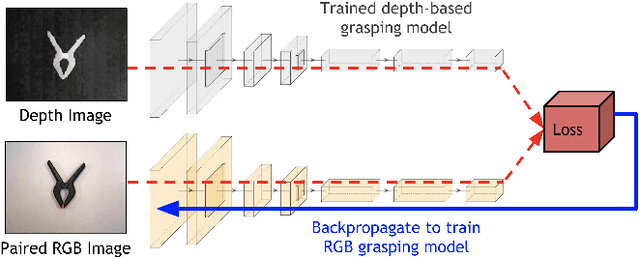
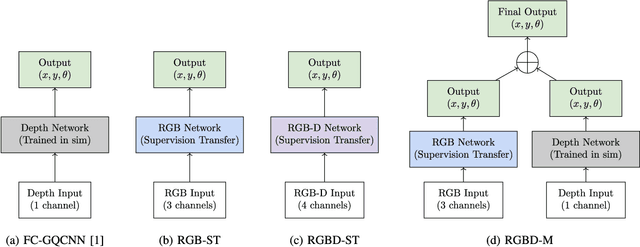

State-of-the-art object grasping methods rely on depth sensing to plan robust grasps, but commercially available depth sensors fail to detect transparent and specular objects. To improve grasping performance on such objects, we introduce a method for learning a multi-modal perception model by bootstrapping from an existing uni-modal model. This transfer learning approach requires only a pre-existing uni-modal grasping model and paired multi-modal image data for training, foregoing the need for ground-truth grasp success labels nor real grasp attempts. Our experiments demonstrate that our approach is able to reliably grasp transparent and reflective objects. Video and supplementary material are available at https://sites.google.com/view/transparent-specular-grasping.
* RA-L with presentation at ICRA 2020
A Minesweeper Solver Using Logic Inference, CSP and Sampling
Oct 07, 2018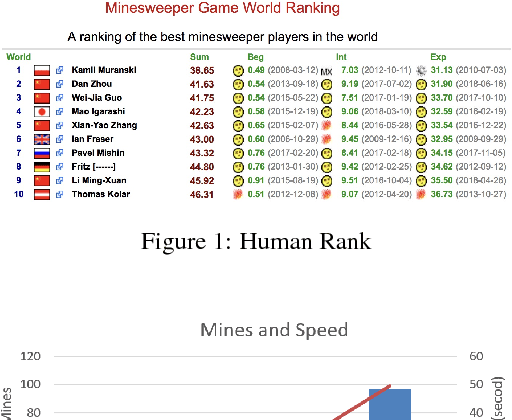
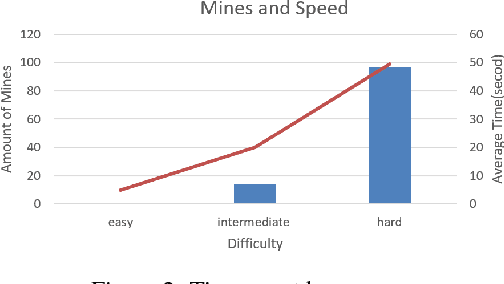
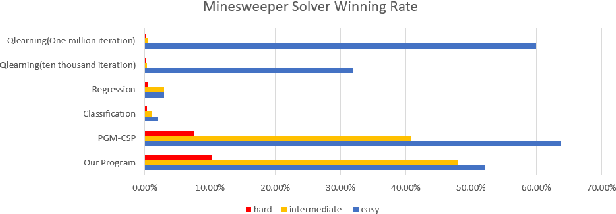
Minesweeper as a puzzle video game and is proved that it is an NPC problem. We use CSP, Logic Inference and Sampling to make a minesweeper solver and we limit us each select in 5 seconds.