 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCaching-Augmented Lifelong Multi-Agent Path Finding
Paper and Code
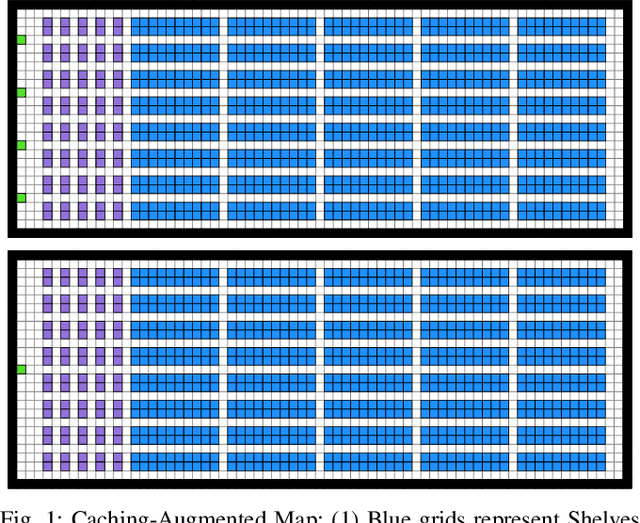

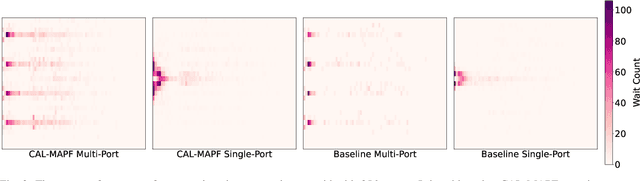
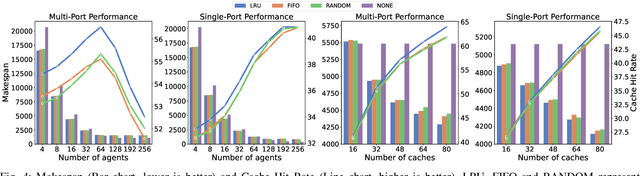
Multi-Agent Path Finding (MAPF), which involves finding collision-free paths for multiple robots, is crucial in various applications. Lifelong MAPF, where targets are reassigned to agents as soon as they complete their initial targets, offers a more accurate approximation of real-world warehouse planning. In this paper, we present a novel mechanism named Caching-Augmented Lifelong MAPF (CAL-MAPF), designed to improve the performance of Lifelong MAPF. We have developed a new type of map grid called cache for temporary item storage and replacement, and designed a locking mechanism for it to improve the stability of the planning solution. This cache mechanism was evaluated using various cache replacement policies and a spectrum of input task distributions. We identified three main factors significantly impacting CAL-MAPF performance through experimentation: suitable input task distribution, high cache hit rate, and smooth traffic. In general, CAL-MAPF has demonstrated potential for performance improvements in certain task distributions, maps, and agent configurations.