 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAccelerating Focal Search in Multi-Agent Path Finding with Tighter Lower Bounds
Mar 04, 2025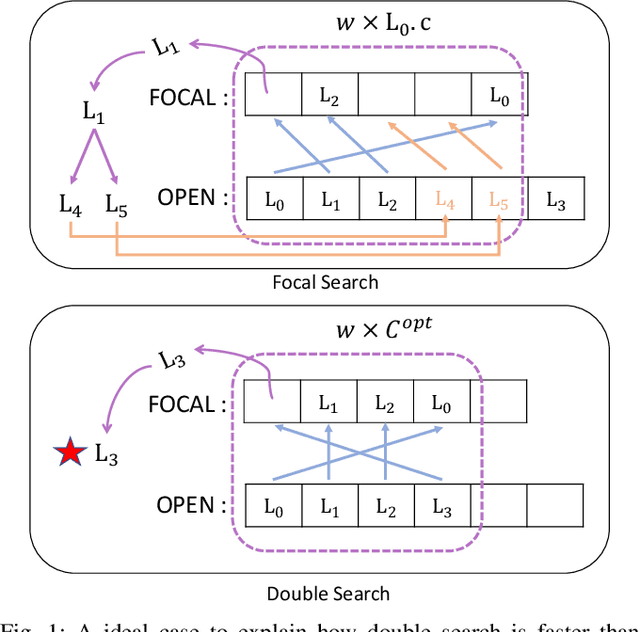


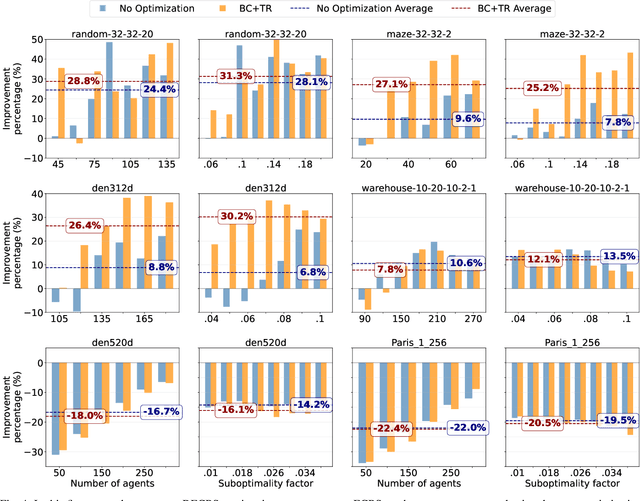
Multi-Agent Path Finding (MAPF) involves finding collision-free paths for multiple agents while minimizing a cost function--an NP-hard problem. Bounded suboptimal methods like Enhanced Conflict-Based Search (ECBS) and Explicit Estimation CBS (EECBS) balance solution quality with computational efficiency using focal search mechanisms. While effective, traditional focal search faces a limitation: the lower bound (LB) value determining which nodes enter the FOCAL list often increases slowly in early search stages, resulting in a constrained search space that delays finding valid solutions. In this paper, we propose a novel bounded suboptimal algorithm, double-ECBS (DECBS), to address this issue by first determining the maximum LB value and then employing a best-first search guided by this LB to find a collision-free path. Experimental results demonstrate that DECBS outperforms ECBS in most test cases and is compatible with existing optimization techniques. DECBS can reduce nearly 30% high-level CT nodes and 50% low-level focal search nodes. When agent density is moderate to high, DECBS achieves a 23.5% average runtime improvement over ECBS with identical suboptimality bounds and optimizations.
Enhancing Lifelong Multi-Agent Path Finding with Cache Mechanism
Jan 06, 2025



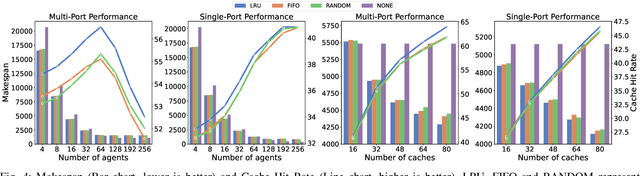
Multi-Agent Path Finding (MAPF), which focuses on finding collision-free paths for multiple robots, is crucial in autonomous warehouse operations. Lifelong MAPF (L-MAPF), where agents are continuously reassigned new targets upon completing their current tasks, offers a more realistic approximation of real-world warehouse scenarios. While cache storage systems can enhance efficiency and reduce operational costs, existing approaches primarily rely on expectations and mathematical models, often without adequately addressing the challenges of multi-robot planning and execution. In this paper, we introduce a novel mechanism called Lifelong MAPF with Cache Mechanism (L-MAPF-CM), which integrates high-level cache storage with low-level path planning. We have involved a new type of map grid called cache for temporary item storage. Additionally, we involved a task assigner (TA) with a locking mechanism to bridge the gap between the new cache grid and L-MAPF algorithm. The TA dynamically allocates target locations to agents based on their status in various scenarios. We evaluated L-MAPF-CM using different cache replacement policies and task distributions. L-MAPF-CM has demonstrated performance improvements particularly with high cache hit rates and smooth traffic conditions.
Caching-Augmented Lifelong Multi-Agent Path Finding
Mar 29, 2024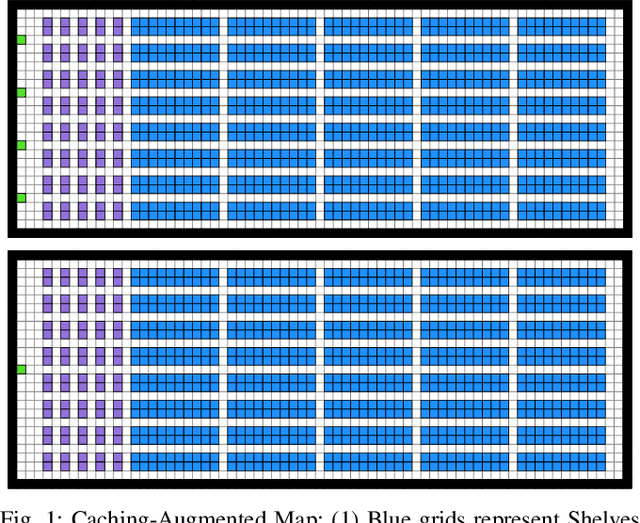

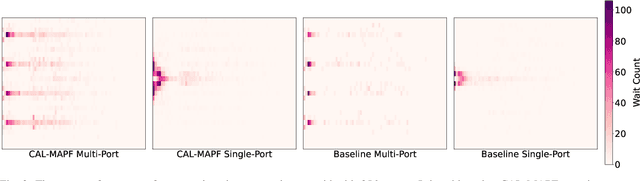
Multi-Agent Path Finding (MAPF), which involves finding collision-free paths for multiple robots, is crucial in various applications. Lifelong MAPF, where targets are reassigned to agents as soon as they complete their initial targets, offers a more accurate approximation of real-world warehouse planning. In this paper, we present a novel mechanism named Caching-Augmented Lifelong MAPF (CAL-MAPF), designed to improve the performance of Lifelong MAPF. We have developed a new type of map grid called cache for temporary item storage and replacement, and designed a locking mechanism for it to improve the stability of the planning solution. This cache mechanism was evaluated using various cache replacement policies and a spectrum of input task distributions. We identified three main factors significantly impacting CAL-MAPF performance through experimentation: suitable input task distribution, high cache hit rate, and smooth traffic. In general, CAL-MAPF has demonstrated potential for performance improvements in certain task distributions, maps, and agent configurations.