 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePortfolio of Solving Strategies in CEGAR-based Object Packing and Scheduling for Sequential 3D Printing
Mar 12, 2026Computing power that used to be available only in supercomputers decades ago especially their parallelism is currently available in standard personal computer CPUs even in CPUs for mobile telephones. We show how to effectively utilize the computing power of modern multi-core personal computer CPU to solve the complex combinatorial problem of object arrangement and scheduling for sequential 3D printing. We achieved this by parallelizing the existing CEGAR-SEQ algorithm that solves the sequential object arrangement and scheduling by expressing it as a linear arithmetic formula which is then solved by a technique inspired by counterexample guided abstraction refinement (CEGAR). The original CEGAR-SEQ algorithm uses an object arrangement strategy that places objects towards the center of the printing plate. We propose alternative object arrangement strategies such as placing objects towards a corner of the printing plate and scheduling objects according to their height. Our parallelization is done at the high-level where we execute the CEGAR-SEQ algorithm in parallel with a portfolio of object arrangement strategies, an algorithm is called Porfolio-CEGAR-SEQ. Our experimental evaluation indicates that Porfolio-CEGAR-SEQ outperforms the original CEGAR-SEQ. When a batch of objects for multiple printing plates is scheduled, Portfolio-CEGAR-SEQ often uses fewer printing plates than CEGAR-SEQ.
Object Packing and Scheduling for Sequential 3D Printing: a Linear Arithmetic Model and a CEGAR-inspired Optimal Solver
Mar 07, 2025We address the problem of object arrangement and scheduling for sequential 3D printing. Unlike the standard 3D printing, where all objects are printed slice by slice at once, in sequential 3D printing, objects are completed one after other. In the sequential case, it is necessary to ensure that the moving parts of the printer do not collide with previously printed objects. We look at the sequential printing problem from the perspective of combinatorial optimization. We propose to express the problem as a linear arithmetic formula, which is then solved using a solver for satisfiability modulo theories (SMT). However, we do not solve the formula expressing the problem of object arrangement and scheduling directly, but we have proposed a technique inspired by counterexample guided abstraction refinement (CEGAR), which turned out to be a key innovation to efficiency.
Multi-agent Path Finding in Continuous Environment
Sep 16, 2024



We address a variant of multi-agent path finding in continuous environment (CE-MAPF), where agents move along sets of smooth curves. Collisions between agents are resolved via avoidance in the space domain. A new Continuous Environment Conflict-Based Search (CE-CBS) algorithm is proposed in this work. CE-CBS combines conflict-based search (CBS) for the high-level search framework with RRT* for low-level path planning. The CE-CBS algorithm is tested under various settings on diverse CE-MAPF instances. Experimental results show that CE-CBS is competitive w.r.t. to other algorithms that consider continuous aspect in MAPF such as MAPF with continuous time.
Counterexample Guided Abstraction Refinement with Non-Refined Abstractions for Multi-Agent Path Finding
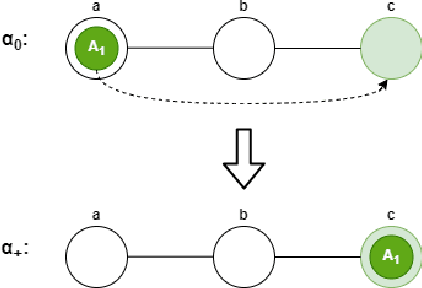
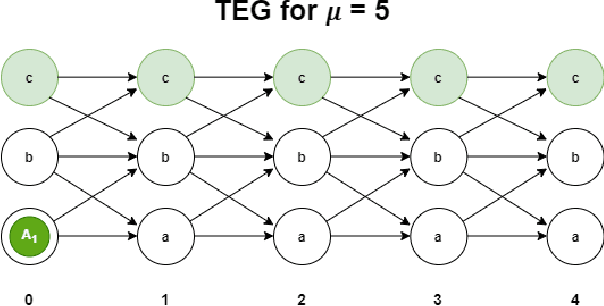
Jan 20, 2023Counterexample guided abstraction refinement (CEGAR) represents a powerful symbolic technique for various tasks such as model checking and reachability analysis. Recently, CEGAR combined with Boolean satisfiability (SAT) has been applied for multi-agent path finding (MAPF), a problem where the task is to navigate agents from their start positions to given individual goal positions so that the agents do not collide with each other. The recent CEGAR approach used the initial abstraction of the MAPF problem where collisions between agents were omitted and were eliminated in subsequent abstraction refinements. We propose in this work a novel CEGAR-style solver for MAPF based on SAT in which some abstractions are deliberately left non-refined. This adds the necessity to post-process the answers obtained from the underlying SAT solver as these answers slightly differ from the correct MAPF solutions. Non-refining however yields order-of-magnitude smaller SAT encodings than those of the previous approach and speeds up the overall solving process making the SAT-based solver for MAPF competitive again in relevant benchmarks.
Heuristically Guided Compilation for Multi-Agent Path Finding
Dec 13, 2022Multi-agent path finding (MAPF) is a task of finding non-conflicting paths connecting agents' specified initial and goal positions in a shared environment. We focus on compilation-based solvers in which the MAPF problem is expressed in a different well established formalism such as mixed-integer linear programming (MILP), Boolean satisfiability (SAT), or constraint programming (CP). As the target solvers for these formalisms act as black-boxes it is challenging to integrate MAPF specific heuristics in the MAPF compilation-based solvers. We show in this work how the build a MAPF encoding for the target SAT solver in which domain specific heuristic knowledge is reflected. The heuristic knowledge is transferred to the SAT solver by selecting candidate paths for each agent and by constructing the encoding only for these candidate paths instead of constructing the encoding for all possible paths for an agent. The conducted experiments show that heuristically guided compilation outperforms the vanilla variants of the SAT-based MAPF solver.
Plan Execution for Multi-Agent Path Finding with Indoor Quadcopters
Jul 06, 2022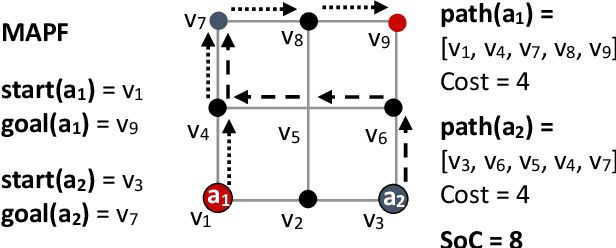
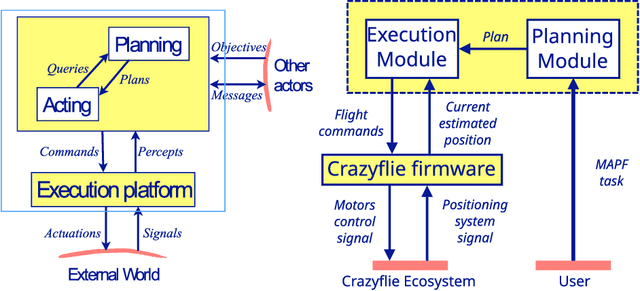
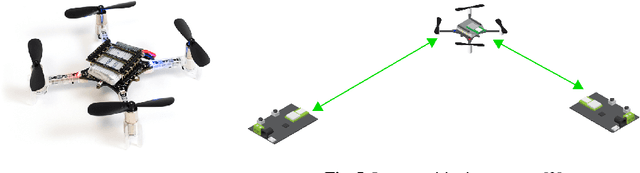
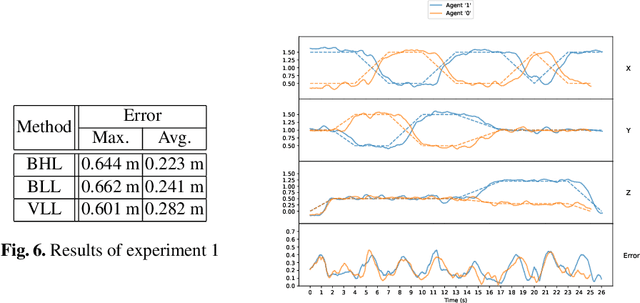
We study the planning and acting phase for the problem of multi-agent path finding (MAPF) in this paper. MAPF is a problem of navigating agents from their start positions to specified individual goal positions so that agents do not collide with each other. Specifically we focus on executing MAPF plans with a group of Crazyflies, small indoor quadcopters . We show how to modify the existing continuous time conflict-based search algorithm (CCBS) to produce plans that are suitable for execution with the quadcopters. The acting phase uses the the Loco positioning system to check if the plan is executed correctly. Our finding is that the CCBS algorithm allows for extensions that can produce safe plans for quadcopters, namely cylindrical protection zone around each quadcopter can be introduced at the planning level.
DPLL: an Integration of Multi-Agent Path Finding and SAT Solving Technologies
Nov 11, 2021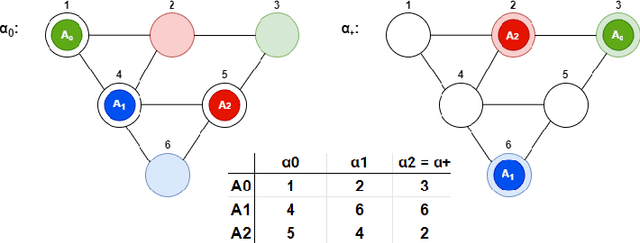
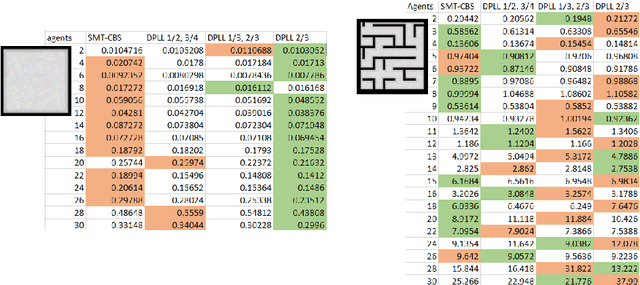
In multi-agent path finding (MAPF), the task is to find non-conflicting paths for multiple agents from their initial positions to given individual goal positions. MAPF represents a classical artificial intelligence problem often addressed by heuristic-search. An important alternative to search-based techniques is compilation of MAPF to a different formalism such as Boolean satisfiability (SAT). Contemporary SAT-based approaches to MAPF regard the SAT solver as an external tool whose task is to return an assignment of all decision variables of a Boolean model of input MAPF. We present in this short paper a novel compilation scheme called DPLL(MAPF) in which the consistency checking of partial assignments of decision variables with respect to the MAPF rules is integrated directly into the SAT solver. This scheme allows for far more automated compilation where the SAT solver and the consistency checking procedure work together simultaneously to create the Boolean model and to search for its satisfying assignment.
Compilation-based Solvers for Multi-Agent Path Finding: a Survey, Discussion, and Future Opportunities
Apr 23, 2021Multi-agent path finding (MAPF) attracts considerable attention in artificial intelligence community as well as in robotics, and other fields such as warehouse logistics. The task in the standard MAPF is to find paths through which agents can navigate from their starting positions to specified individual goal positions. The combination of two additional requirements makes the problem computationally challenging: (i) agents must not collide with each other and (ii) the paths must be optimal with respect to some objective. Two major approaches to optimal MAPF solving include (1) dedicated search-based methods, which solve MAPF directly, and (2) compilation-based methods that reduce a MAPF instance to an instance in a different well established formalism, for which an efficient solver exists. The compilation-based MAPF solving can benefit from advancements accumulated during the development of the target solver often decades long. We summarize and compare contemporary compilation-based solvers for MAPF using formalisms like ASP, MIP, and SAT. We show the lessons learned from past developments and current trends in the topic and discuss its wider impact.
Sparsification for Fast Optimal Multi-Robot Path Planning in Lazy Compilation Schemes
Mar 08, 2021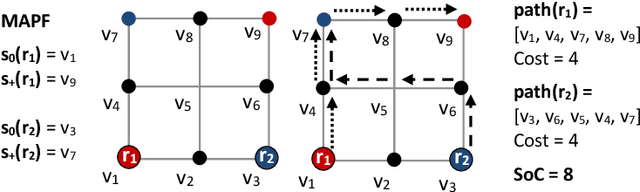
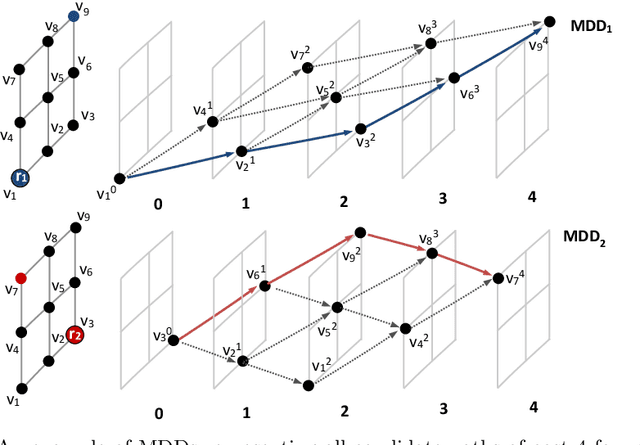
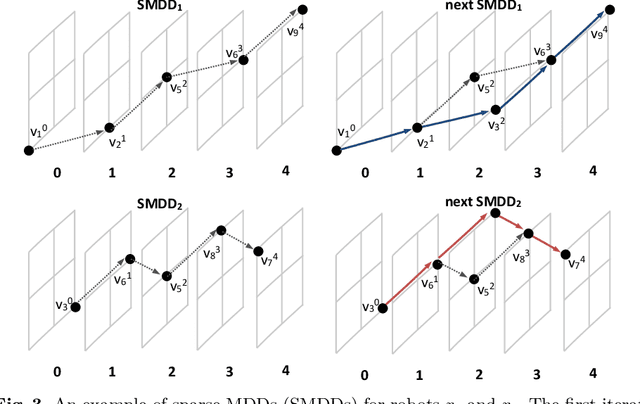
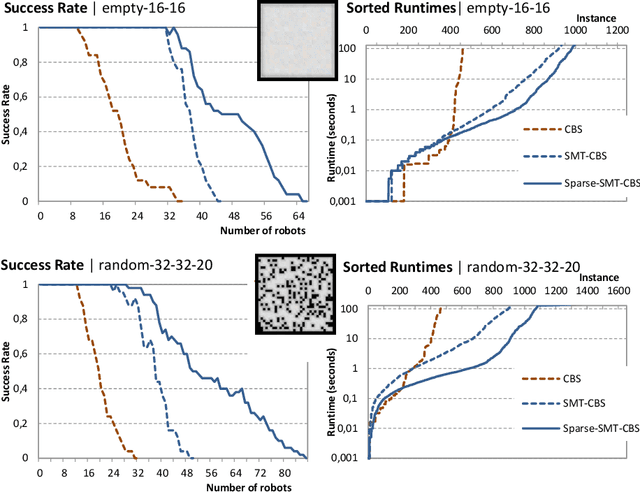
Path planning for multiple robots (MRPP) represents a task of finding non-colliding paths for robots through which they can navigate from their initial positions to specified goal positions. The problem is usually modeled using undirected graphs where robots move between vertices across edges. Contemporary optimal solving algorithms include dedicated search-based methods, that solve the problem directly, and compilation-based algorithms that reduce MRPP to a different formalism for which an efficient solver exists, such as constraint programming (CP), mixed integer programming (MIP), or Boolean satisfiability (SAT). In this paper, we enhance existing SAT-based algorithm for MRPP via spartification of the set of candidate paths for each robot from which target Boolean encoding is derived. Suggested sparsification of the set of paths led to smaller target Boolean formulae that can be constructed and solved faster while optimality guarantees of the approach have been kept.
Multi-Goal Multi-Agent Path Finding via Decoupled and Integrated Goal Vertex Ordering
Sep 10, 2020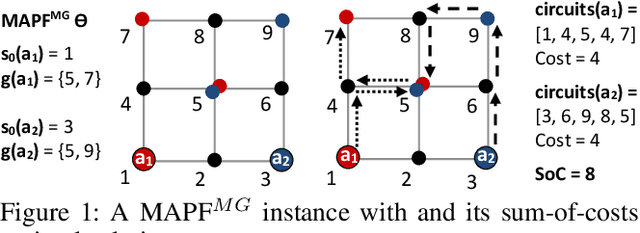
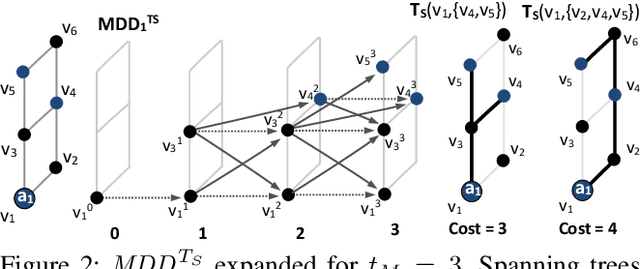
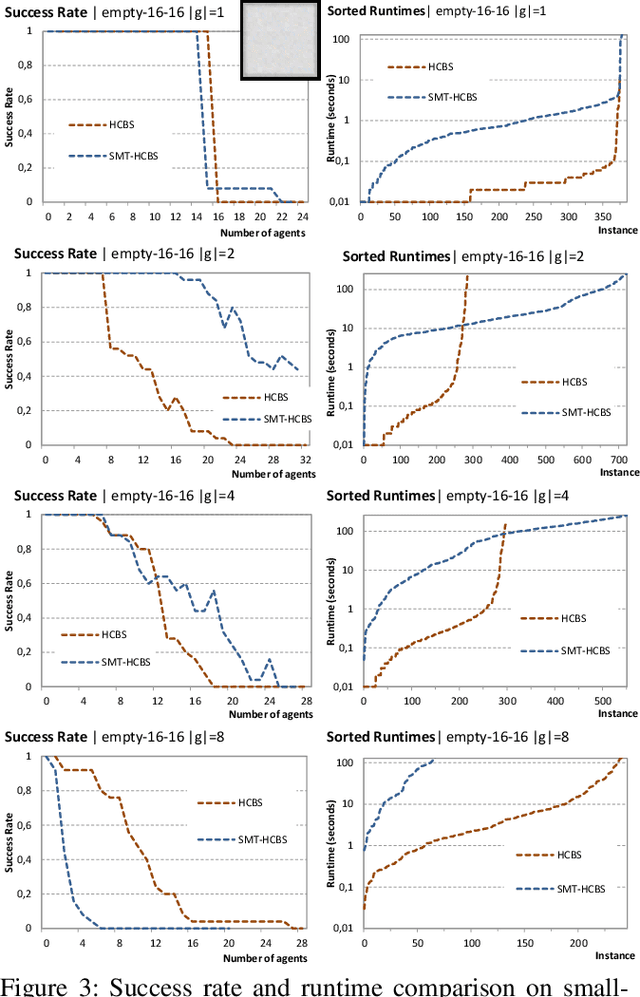
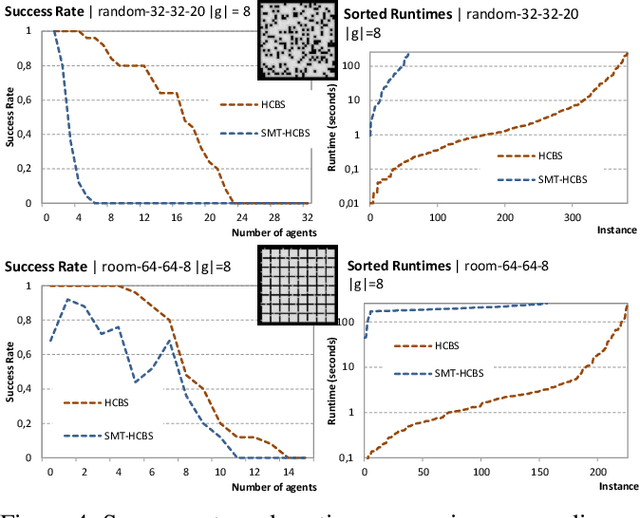
We introduce multi-goal multi agent path finding (MAPF$^{MG}$) which generalizes the standard discrete multi-agent path finding (MAPF) problem. While the task in MAPF is to navigate agents in an undirected graph from their starting vertices to one individual goal vertex per agent, MAPF$^{MG}$ assigns each agent multiple goal vertices and the task is to visit each of them at least once. Solving MAPF$^{MG}$ not only requires finding collision free paths for individual agents but also determining the order of visiting agent's goal vertices so that common objectives like the sum-of-costs are optimized. We suggest two novel algorithms using different paradigms to address MAPF$^{MG}$: a heuristic search-based search algorithm called Hamiltonian-CBS (HCBS) and a compilation-based algorithm built using the SMT paradigm, called SMT-Hamiltonian-CBS (SMT-HCBS). Experimental comparison suggests limitations of compilation-based approach.