 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Impact of Visualizing Design Gradients for Human Designers
Oct 07, 2021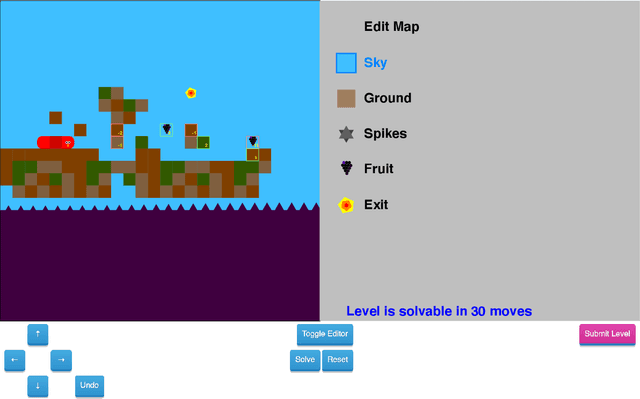

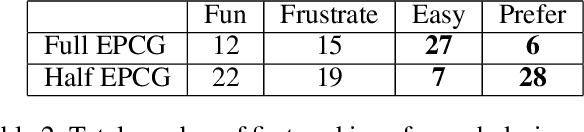

Mixed-initiative Procedural Content Generation (PCG) refers to tools or systems in which a human designer works with an algorithm to produce game content. This area of research remains relatively under-explored, with the majority of mixed-initiative PCG level design systems using a common set of search-based PCG algorithms. In this paper, we introduce a mixed-initiative tool employing Exhaustive PCG (EPCG) for puzzle level design to further explore mixed-initiative PCG. We run an online human subject study in which individuals use the tool with an EPCG component turned on or off. Our analysis of the results demonstrates that, although a majority of users did not prefer the tool, it made the level design process significantly easier, and that the tool impacted the subjects' design process. This paper describes the study results and draws lessons for mixed-initiative PCG tool design.
* 8 pages, 1 figure, AIIDE 2021
Multi-Agent Pathfinding: Definitions, Variants, and Benchmarks
Jun 19, 2019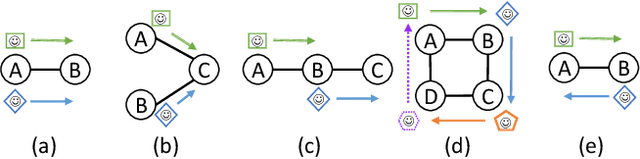
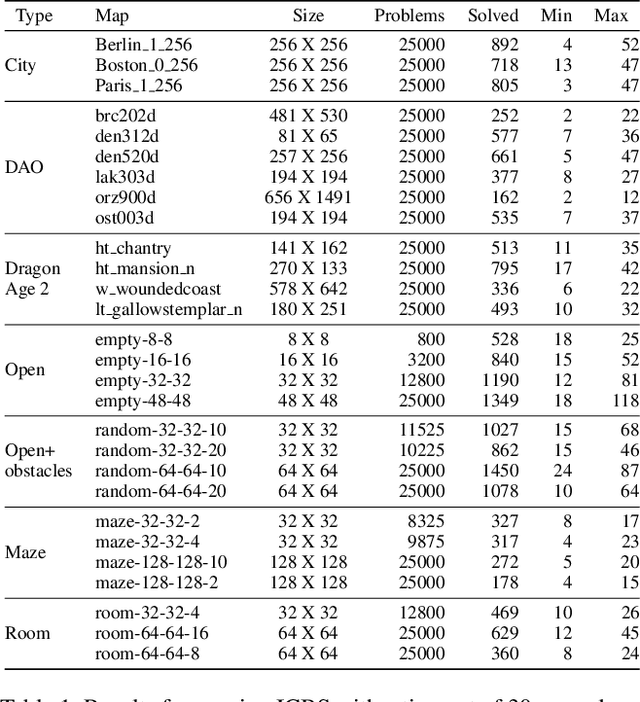
The MAPF problem is the fundamental problem of planning paths for multiple agents, where the key constraint is that the agents will be able to follow these paths concurrently without colliding with each other. Applications of MAPF include automated warehouses and autonomous vehicles. Research on MAPF has been flourishing in the past couple of years. Different MAPF research papers make different assumptions, e.g., whether agents can traverse the same road at the same time, and have different objective functions, e.g., minimize makespan or sum of agents' actions costs. These assumptions and objectives are sometimes implicitly assumed or described informally. This makes it difficult to establish appropriate baselines for comparison in research papers, as well as making it difficult for practitioners to find the papers relevant to their concrete application. This paper aims to fill this gap and support researchers and practitioners by providing a unifying terminology for describing common MAPF assumptions and objectives. In addition, we also provide pointers to two MAPF benchmarks. In particular, we introduce a new grid-based benchmark for MAPF, and demonstrate experimentally that it poses a challenge to contemporary MAPF algorithms.
Exponential-Binary State-Space Search
Jun 07, 2019
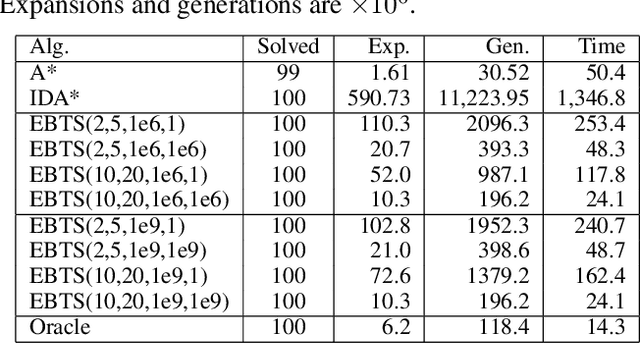
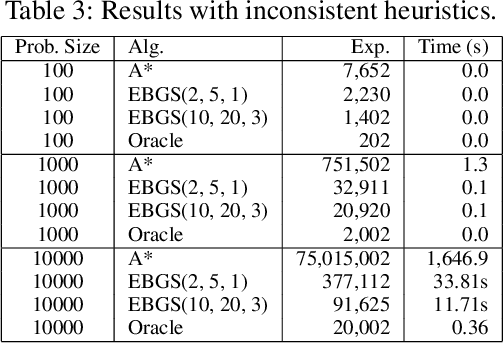
Iterative deepening search is used in applications where the best cost bound for state-space search is unknown. The iterative deepening process is used to avoid overshooting the appropriate cost bound and doing too much work as a result. However, iterative deepening search also does too much work if the cost bound grows too slowly. This paper proposes a new framework for iterative deepening search called exponential-binary state-space search. The approach interleaves exponential and binary searches to find the desired cost bound, reducing the worst-case overhead from polynomial to logarithmic. Exponential-binary search can be used with bounded depth-first search to improve the worst-case performance of IDA* and with breadth-first heuristic search to improve the worst-case performance of search with inconsistent heuristics.