 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Object Tracking with Deep Learning Ensemble for Unmanned Aerial System Applications
Oct 05, 2021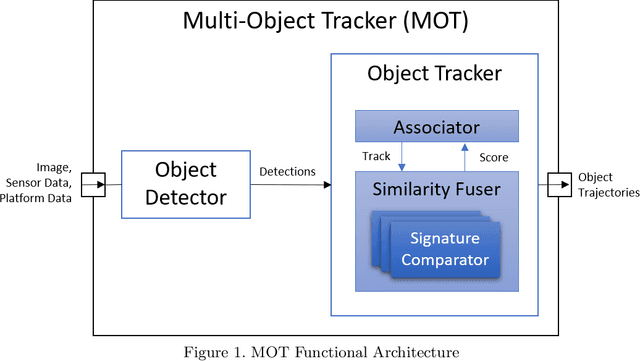

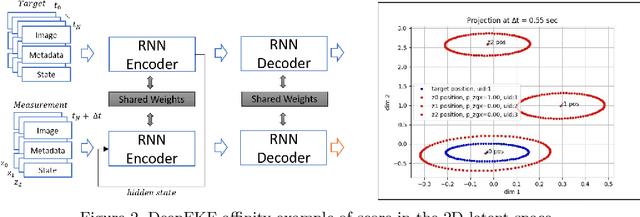
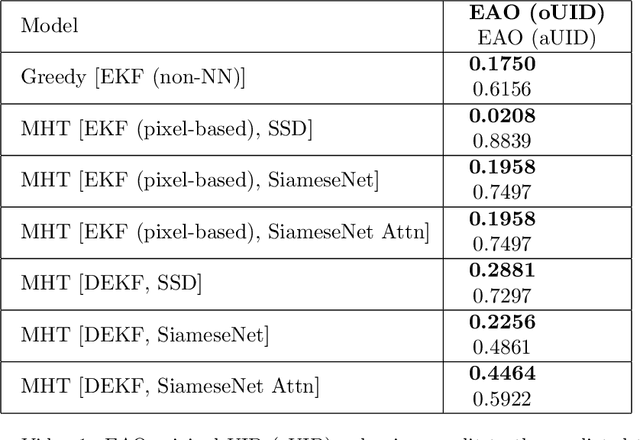
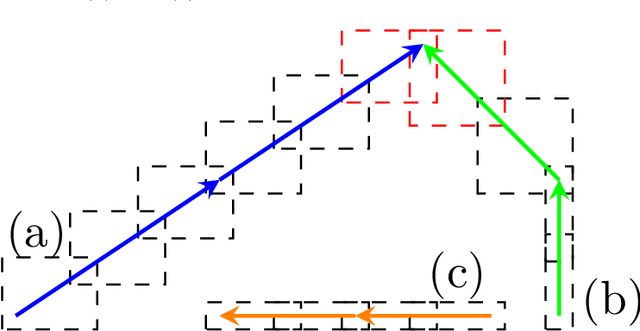
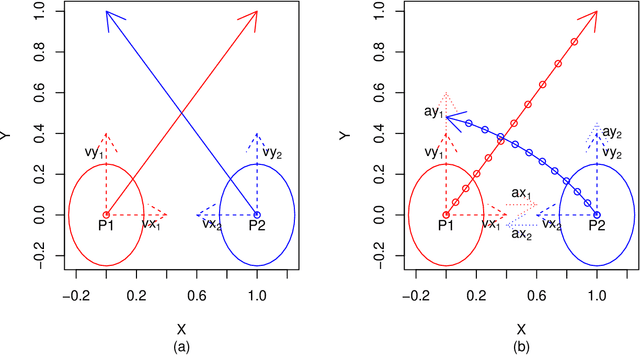
Multi-object tracking (MOT) is a crucial component of situational awareness in military defense applications. With the growing use of unmanned aerial systems (UASs), MOT methods for aerial surveillance is in high demand. Application of MOT in UAS presents specific challenges such as moving sensor, changing zoom levels, dynamic background, illumination changes, obscurations and small objects. In this work, we present a robust object tracking architecture aimed to accommodate for the noise in real-time situations. We propose a kinematic prediction model, called Deep Extended Kalman Filter (DeepEKF), in which a sequence-to-sequence architecture is used to predict entity trajectories in latent space. DeepEKF utilizes a learned image embedding along with an attention mechanism trained to weight the importance of areas in an image to predict future states. For the visual scoring, we experiment with different similarity measures to calculate distance based on entity appearances, including a convolutional neural network (CNN) encoder, pre-trained using Siamese networks. In initial evaluation experiments, we show that our method, combining scoring structure of the kinematic and visual models within a MHT framework, has improved performance especially in edge cases where entity motion is unpredictable, or the data presents frames with significant gaps.
Tech Report: Efficient and Exact Collision Detection for Circular Agents
Aug 26, 2019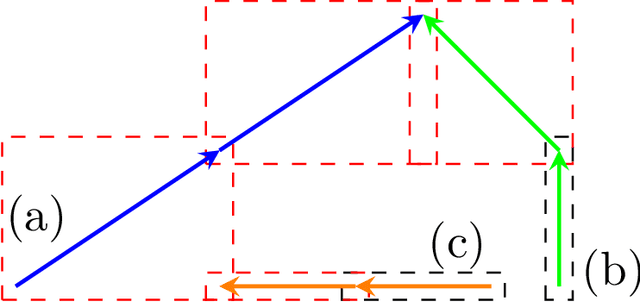
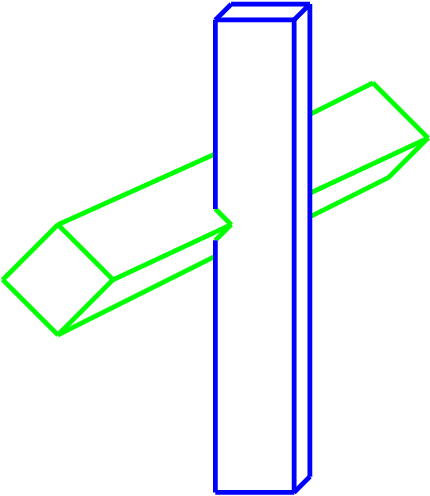
A common problem in multi-robot algorithms is collision detection. Many solutions exist, but often suffer from problems such as high computational cost or causing false negative or false positive detections. In practice, these problems can result in results that range from inefficiency and annoyance to catastrophic. The main contribution of this paper is to provide a high-level overview of major categories of collision detection, provide insight into the need for accurate and computationally efficient collision detection, and provide methods of collision detection and anticipatory collision avoidance that are both computationally efficient and exact -- that is, they will never yield false negative or false positive detections. Supplementary reference for mathematics behind collision detection.
Multi-Agent Pathfinding: Definitions, Variants, and Benchmarks
Jun 19, 2019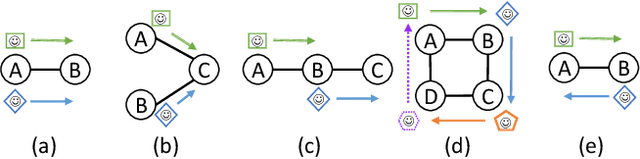
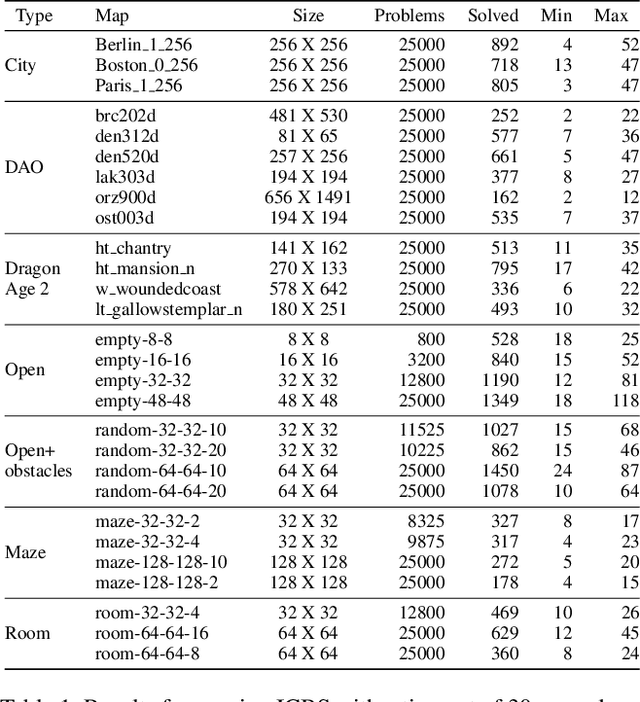
The MAPF problem is the fundamental problem of planning paths for multiple agents, where the key constraint is that the agents will be able to follow these paths concurrently without colliding with each other. Applications of MAPF include automated warehouses and autonomous vehicles. Research on MAPF has been flourishing in the past couple of years. Different MAPF research papers make different assumptions, e.g., whether agents can traverse the same road at the same time, and have different objective functions, e.g., minimize makespan or sum of agents' actions costs. These assumptions and objectives are sometimes implicitly assumed or described informally. This makes it difficult to establish appropriate baselines for comparison in research papers, as well as making it difficult for practitioners to find the papers relevant to their concrete application. This paper aims to fill this gap and support researchers and practitioners by providing a unifying terminology for describing common MAPF assumptions and objectives. In addition, we also provide pointers to two MAPF benchmarks. In particular, we introduce a new grid-based benchmark for MAPF, and demonstrate experimentally that it poses a challenge to contemporary MAPF algorithms.