 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVirtual Community: An Open World for Humans, Robots, and Society
Aug 20, 2025

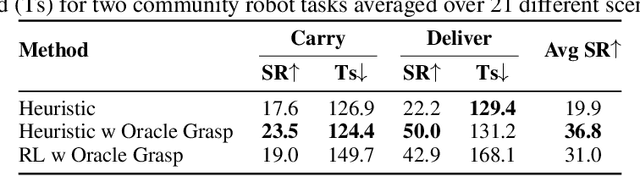

The rapid progress in AI and Robotics may lead to a profound societal transformation, as humans and robots begin to coexist within shared communities, introducing both opportunities and challenges. To explore this future, we present Virtual Community-an open-world platform for humans, robots, and society-built on a universal physics engine and grounded in real-world 3D scenes. With Virtual Community, we aim to study embodied social intelligence at scale: 1) How robots can intelligently cooperate or compete; 2) How humans develop social relations and build community; 3) More importantly, how intelligent robots and humans can co-exist in an open world. To support these, Virtual Community features: 1) An open-source multi-agent physics simulator that supports robots, humans, and their interactions within a society; 2) A large-scale, real-world aligned community generation pipeline, including vast outdoor space, diverse indoor scenes, and a community of grounded agents with rich characters and appearances. Leveraging Virtual Community, we propose two novel challenges. The Community Planning Challenge evaluates multi-agent reasoning and planning ability in open-world settings, such as cooperating to help agents with daily activities and efficiently connecting other agents. The Community Robot Challenge requires multiple heterogeneous robots to collaborate in solving complex open-world tasks. We evaluate various baselines on these tasks and demonstrate the challenges in both high-level open-world task planning and low-level cooperation controls. We hope that Virtual Community will unlock further study of human-robot coexistence within open-world environments.
Constrained Human-AI Cooperation: An Inclusive Embodied Social Intelligence Challenge
Nov 05, 2024



We introduce Constrained Human-AI Cooperation (CHAIC), an inclusive embodied social intelligence challenge designed to test social perception and cooperation in embodied agents. In CHAIC, the goal is for an embodied agent equipped with egocentric observations to assist a human who may be operating under physical constraints -- e.g., unable to reach high places or confined to a wheelchair -- in performing common household or outdoor tasks as efficiently as possible. To achieve this, a successful helper must: (1) infer the human's intents and constraints by following the human and observing their behaviors (social perception), and (2) make a cooperative plan tailored to the human partner to solve the task as quickly as possible, working together as a team (cooperative planning). To benchmark this challenge, we create four new agents with real physical constraints and eight long-horizon tasks featuring both indoor and outdoor scenes with various constraints, emergency events, and potential risks. We benchmark planning- and learning-based baselines on the challenge and introduce a new method that leverages large language models and behavior modeling. Empirical evaluations demonstrate the effectiveness of our benchmark in enabling systematic assessment of key aspects of machine social intelligence. Our benchmark and code are publicly available at https://github.com/UMass-Foundation-Model/CHAIC.
SOK-Bench: A Situated Video Reasoning Benchmark with Aligned Open-World Knowledge
May 17, 2024



Learning commonsense reasoning from visual contexts and scenes in real-world is a crucial step toward advanced artificial intelligence. However, existing video reasoning benchmarks are still inadequate since they were mainly designed for factual or situated reasoning and rarely involve broader knowledge in the real world. Our work aims to delve deeper into reasoning evaluations, specifically within dynamic, open-world, and structured context knowledge. We propose a new benchmark (SOK-Bench), consisting of 44K questions and 10K situations with instance-level annotations depicted in the videos. The reasoning process is required to understand and apply situated knowledge and general knowledge for problem-solving. To create such a dataset, we propose an automatic and scalable generation method to generate question-answer pairs, knowledge graphs, and rationales by instructing the combinations of LLMs and MLLMs. Concretely, we first extract observable situated entities, relations, and processes from videos for situated knowledge and then extend to open-world knowledge beyond the visible content. The task generation is facilitated through multiple dialogues as iterations and subsequently corrected and refined by our designed self-promptings and demonstrations. With a corpus of both explicit situated facts and implicit commonsense, we generate associated question-answer pairs and reasoning processes, finally followed by manual reviews for quality assurance. We evaluated recent mainstream large vision-language models on the benchmark and found several insightful conclusions. For more information, please refer to our benchmark at www.bobbywu.com/SOKBench.
COMBO: Compositional World Models for Embodied Multi-Agent Cooperation
Apr 16, 2024In this paper, we investigate the problem of embodied multi-agent cooperation, where decentralized agents must cooperate given only partial egocentric views of the world. To effectively plan in this setting, in contrast to learning world dynamics in a single-agent scenario, we must simulate world dynamics conditioned on an arbitrary number of agents' actions given only partial egocentric visual observations of the world. To address this issue of partial observability, we first train generative models to estimate the overall world state given partial egocentric observations. To enable accurate simulation of multiple sets of actions on this world state, we then propose to learn a compositional world model for multi-agent cooperation by factorizing the naturally composable joint actions of multiple agents and compositionally generating the video. By leveraging this compositional world model, in combination with Vision Language Models to infer the actions of other agents, we can use a tree search procedure to integrate these modules and facilitate online cooperative planning. To evaluate the efficacy of our methods, we create two challenging embodied multi-agent long-horizon cooperation tasks using the ThreeDWorld simulator and conduct experiments with 2-4 agents. The results show our compositional world model is effective and the framework enables the embodied agents to cooperate efficiently with different agents across various tasks and an arbitrary number of agents, showing the promising future of our proposed framework. More videos can be found at https://vis-www.cs.umass.edu/combo/.
Improving Reinforcement Learning from Human Feedback with Efficient Reward Model Ensemble
Jan 30, 2024
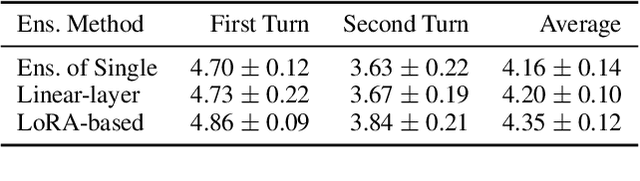
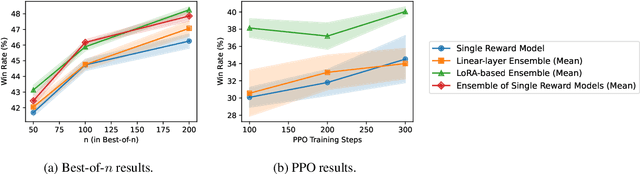
Reinforcement Learning from Human Feedback (RLHF) is a widely adopted approach for aligning large language models with human values. However, RLHF relies on a reward model that is trained with a limited amount of human preference data, which could lead to inaccurate predictions. As a result, RLHF may produce outputs that are misaligned with human values. To mitigate this issue, we contribute a reward ensemble method that allows the reward model to make more accurate predictions. As using an ensemble of large language model-based reward models can be computationally and resource-expensive, we explore efficient ensemble methods including linear-layer ensemble and LoRA-based ensemble. Empirically, we run Best-of-$n$ and Proximal Policy Optimization with our ensembled reward models, and verify that our ensemble methods help improve the alignment performance of RLHF outputs.
HAZARD Challenge: Embodied Decision Making in Dynamically Changing Environments
Jan 23, 2024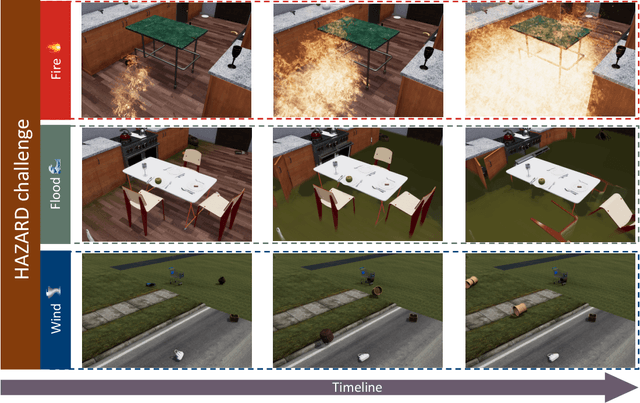
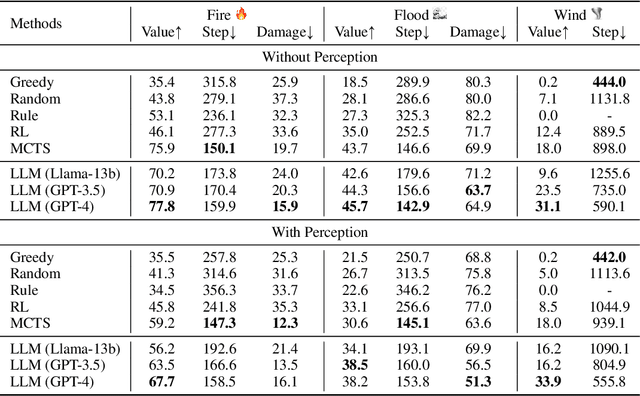

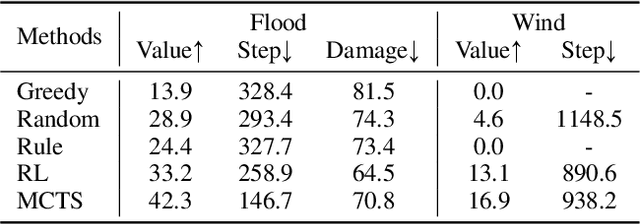
Recent advances in high-fidelity virtual environments serve as one of the major driving forces for building intelligent embodied agents to perceive, reason and interact with the physical world. Typically, these environments remain unchanged unless agents interact with them. However, in real-world scenarios, agents might also face dynamically changing environments characterized by unexpected events and need to rapidly take action accordingly. To remedy this gap, we propose a new simulated embodied benchmark, called HAZARD, specifically designed to assess the decision-making abilities of embodied agents in dynamic situations. HAZARD consists of three unexpected disaster scenarios, including fire, flood, and wind, and specifically supports the utilization of large language models (LLMs) to assist common sense reasoning and decision-making. This benchmark enables us to evaluate autonomous agents' decision-making capabilities across various pipelines, including reinforcement learning (RL), rule-based, and search-based methods in dynamically changing environments. As a first step toward addressing this challenge using large language models, we further develop an LLM-based agent and perform an in-depth analysis of its promise and challenge of solving these challenging tasks. HAZARD is available at https://vis-www.cs.umass.edu/hazard/.
Iteratively Learn Diverse Strategies with State Distance Information
Oct 23, 2023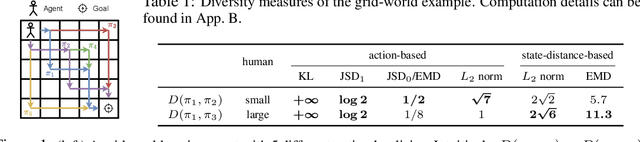
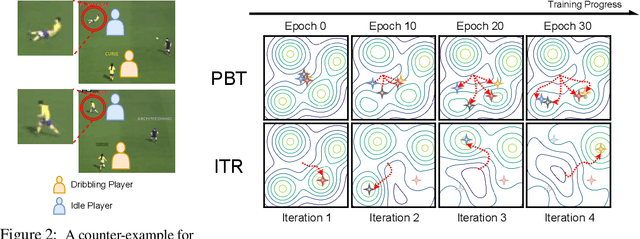
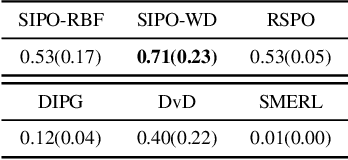
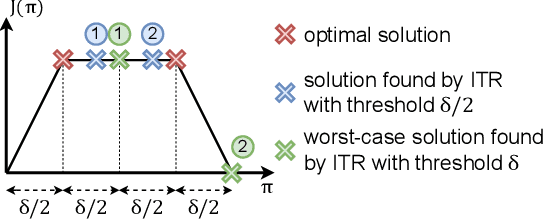
In complex reinforcement learning (RL) problems, policies with similar rewards may have substantially different behaviors. It remains a fundamental challenge to optimize rewards while also discovering as many diverse strategies as possible, which can be crucial in many practical applications. Our study examines two design choices for tackling this challenge, i.e., diversity measure and computation framework. First, we find that with existing diversity measures, visually indistinguishable policies can still yield high diversity scores. To accurately capture the behavioral difference, we propose to incorporate the state-space distance information into the diversity measure. In addition, we examine two common computation frameworks for this problem, i.e., population-based training (PBT) and iterative learning (ITR). We show that although PBT is the precise problem formulation, ITR can achieve comparable diversity scores with higher computation efficiency, leading to improved solution quality in practice. Based on our analysis, we further combine ITR with two tractable realizations of the state-distance-based diversity measures and develop a novel diversity-driven RL algorithm, State-based Intrinsic-reward Policy Optimization (SIPO), with provable convergence properties. We empirically examine SIPO across three domains from robot locomotion to multi-agent games. In all of our testing environments, SIPO consistently produces strategically diverse and human-interpretable policies that cannot be discovered by existing baselines.