 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-modal Trajectory Prediction for Autonomous Driving with Semantic Map and Dynamic Graph Attention Network
Mar 30, 2021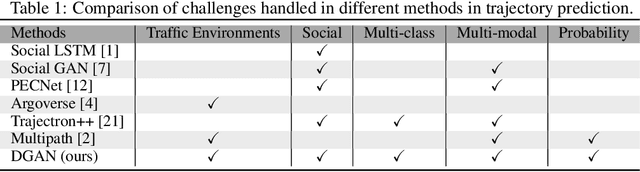
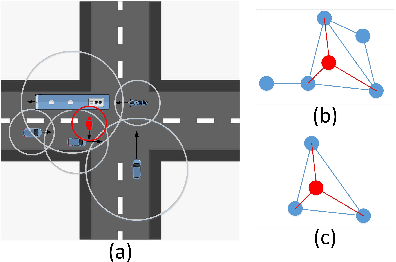
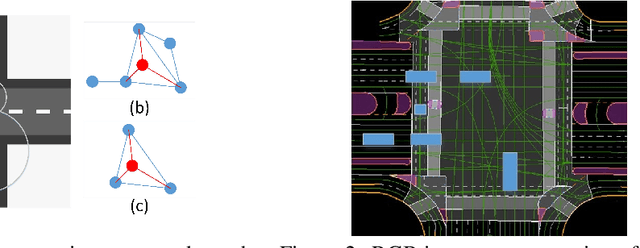
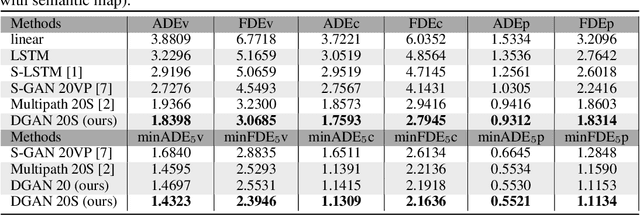
Predicting future trajectories of surrounding obstacles is a crucial task for autonomous driving cars to achieve a high degree of road safety. There are several challenges in trajectory prediction in real-world traffic scenarios, including obeying traffic rules, dealing with social interactions, handling traffic of multi-class movement, and predicting multi-modal trajectories with probability. Inspired by people's natural habit of navigating traffic with attention to their goals and surroundings, this paper presents a unique dynamic graph attention network to solve all those challenges. The network is designed to model the dynamic social interactions among agents and conform to traffic rules with a semantic map. By extending the anchor-based method to multiple types of agents, the proposed method can predict multi-modal trajectories with probabilities for multi-class movements using a single model. We validate our approach on the proprietary autonomous driving dataset for the logistic delivery scenario and two publicly available datasets. The results show that our method outperforms state-of-the-art techniques and demonstrates the potential for trajectory prediction in real-world traffic.
Autonomous Last-mile Delivery Vehicles in Complex Traffic Environments
Jan 22, 2020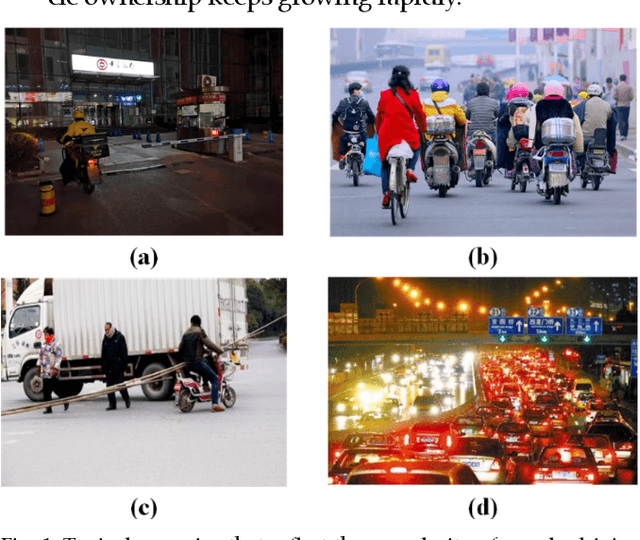
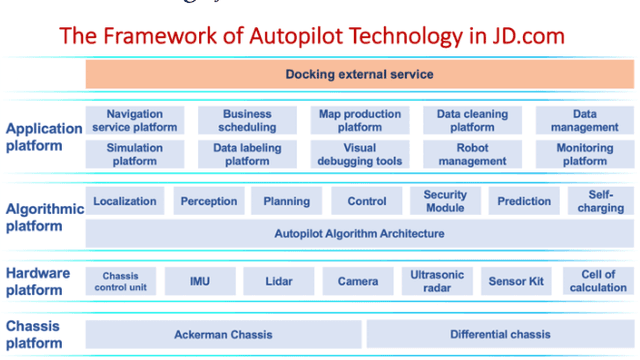
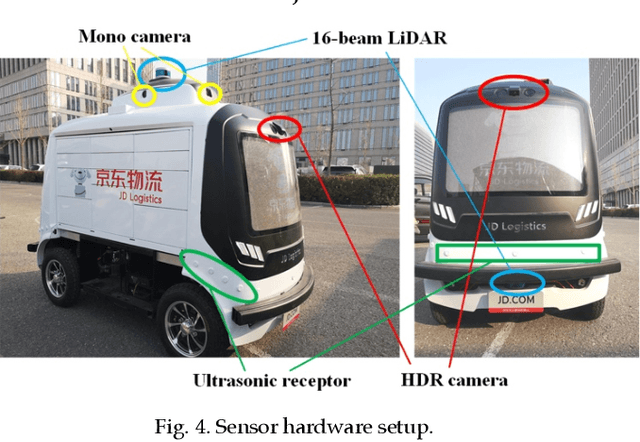
E-commerce has evolved with the digital technology revolution over the years. Last-mile logistics service contributes a significant part of the e-commerce experience. In contrast to the traditional last-mile logistics services, smart logistics service with autonomous driving technologies provides a promising solution to reduce the delivery cost and to improve efficiency. However, the traffic conditions in complex traffic environments, such as those in China, are more challenging compared to those in well-developed countries. Many types of moving objects (such as pedestrians, bicycles, electric bicycles, and motorcycles, etc.) share the road with autonomous vehicles, and their behaviors are not easy to track and predict. This paper introduces a technical solution from JD.com, a leading E-commerce company in China, to the autonomous last-mile delivery in complex traffic environments. Concretely, the methodologies in each module of our autonomous vehicles are presented, together with safety guarantee strategies. Up to this point, JD.com has deployed more than 300 self-driving vehicles for trial operations in tens of provinces of China, with an accumulated 715,819 miles and up to millions of on-road testing hours.
Trajectory Planning for Autonomous Parking in Complex Environments: A Tunnel-based Optimal Control Approach
Oct 11, 2019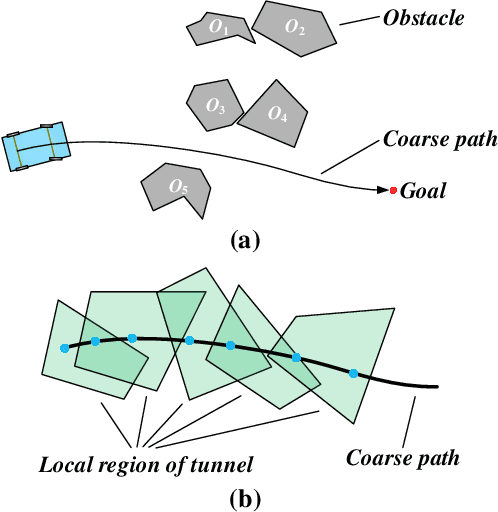
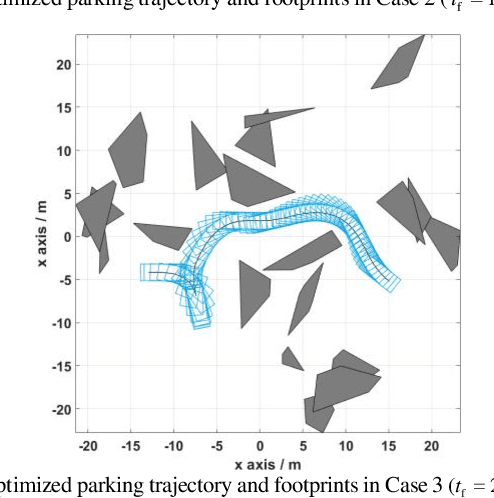


This paper proposes a fast and accurate trajectory planning algorithm for autonomous parking. Nominally, an optimal control problem should be formulated to describe this scheme, but the dimensionality of the optimal control problem is usually large, because the vehicle needs to avoid collision with every obstacle at every moment during the entire dynamic process. Although an initial guess obtained by a sample-and-search based planner facilitates the numerical optimization process, it is still far from being as fast as real-time. To address this issue, we replace all of the collision-avoidance constraints by series of within-tunnel conditions. Concretely, we develop a tunnel-based strategy such that the vehicle is restricted to move within the tunnels which naturally separate the vehicle from the obstacles. Unification, efficiency, and robustness of the proposed trajectory planning method have been verified by simulations.
Baidu Apollo Auto-Calibration System - An Industry-Level Data-Driven and Learning based Vehicle Longitude Dynamic Calibrating Algorithm
Aug 30, 2018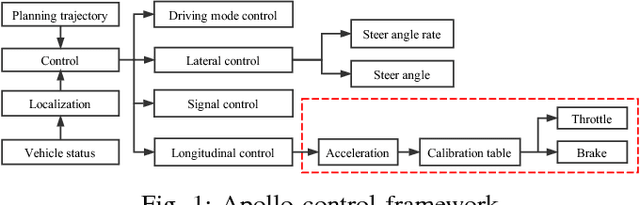
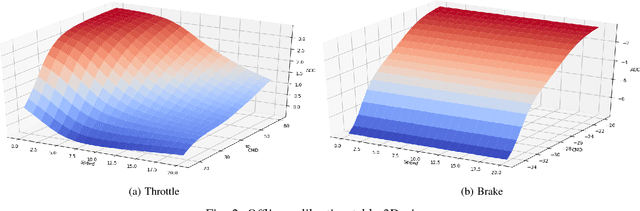
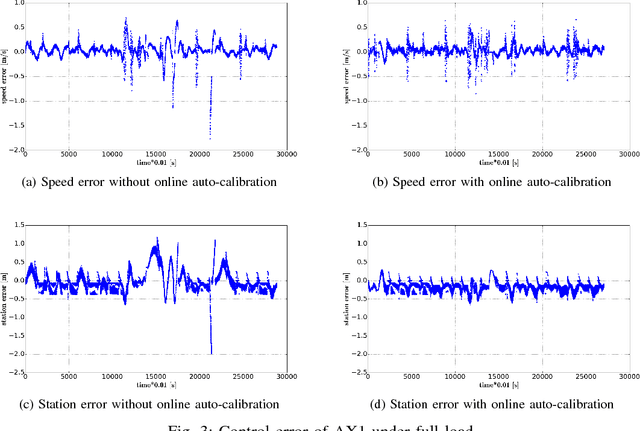
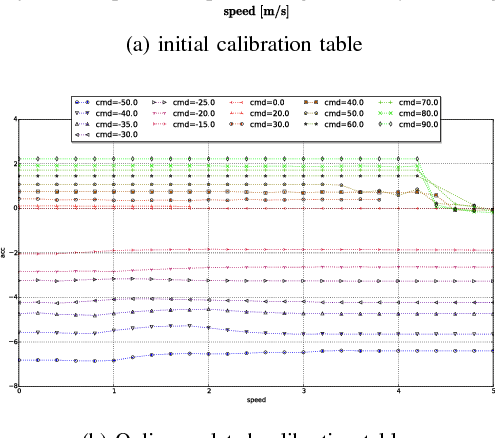
For any autonomous driving vehicle, control module determines its road performance and safety, i.e. its precision and stability should stay within a carefully-designed range. Nonetheless, control algorithms require vehicle dynamics (such as longitudinal dynamics) as inputs, which, unfortunately, are obscure to calibrate in real time. As a result, to achieve reasonable performance, most, if not all, research-oriented autonomous vehicles do manual calibrations in a one-by-one fashion. Since manual calibration is not sustainable once entering into mass production stage for industrial purposes, we here introduce a machine-learning based auto-calibration system for autonomous driving vehicles. In this paper, we will show how we build a data-driven longitudinal calibration procedure using machine learning techniques. We first generated offline calibration tables from human driving data. The offline table serves as an initial guess for later uses and it only needs twenty-minutes data collection and process. We then used an online-learning algorithm to appropriately update the initial table (the offline table) based on real-time performance analysis. This longitudinal auto-calibration system has been deployed to more than one hundred Baidu Apollo self-driving vehicles (including hybrid family vehicles and electronic delivery-only vehicles) since April 2018. By August 27, 2018, it had been tested for more than two thousands hours, ten thousands kilometers (6,213 miles) and yet proven to be effective.
An Auto-tuning Framework for Autonomous Vehicles
Aug 14, 2018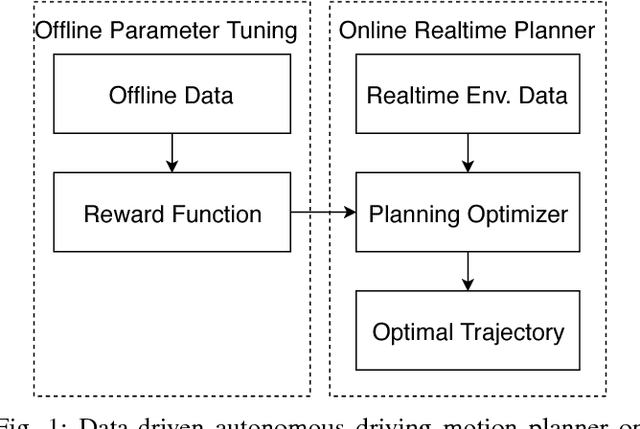
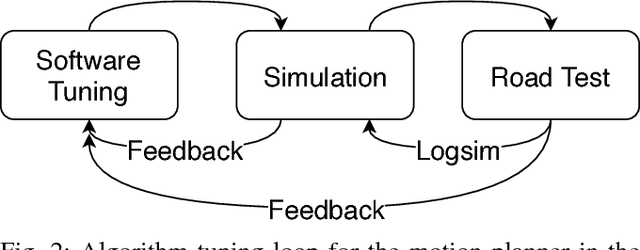
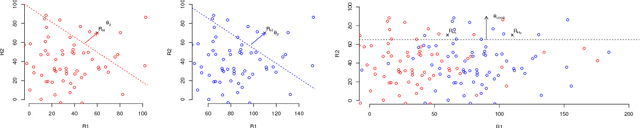
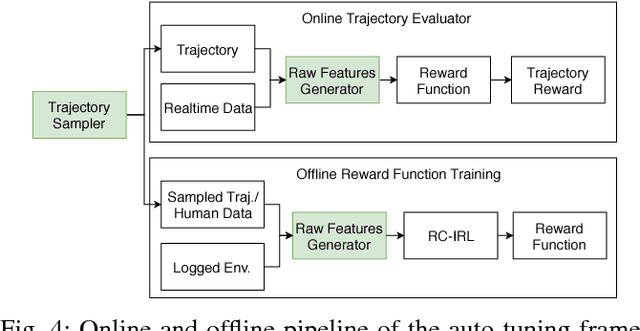
Many autonomous driving motion planners generate trajectories by optimizing a reward/cost functional. Designing and tuning a high-performance reward/cost functional for Level-4 autonomous driving vehicles with exposure to different driving conditions is challenging. Traditionally, reward/cost functional tuning involves substantial human effort and time spent on both simulations and road tests. As the scenario becomes more complicated, tuning to improve the motion planner performance becomes increasingly difficult. To systematically solve this issue, we develop a data-driven auto-tuning framework based on the Apollo autonomous driving framework. The framework includes a novel rank-based conditional inverse reinforcement learning algorithm, an offline training strategy and an automatic method of collecting and labeling data. Our auto-tuning framework has the following advantages that make it suitable for tuning an autonomous driving motion planner. First, compared to that of most inverse reinforcement learning algorithms, our algorithm training is efficient and capable of being applied to different scenarios. Second, the offline training strategy offers a safe way to adjust the parameters before public road testing. Third, the expert driving data and information about the surrounding environment are collected and automatically labeled, which considerably reduces the manual effort. Finally, the motion planner tuned by the framework is examined via both simulation and public road testing and is shown to achieve good performance.
Baidu Apollo EM Motion Planner
Jul 20, 2018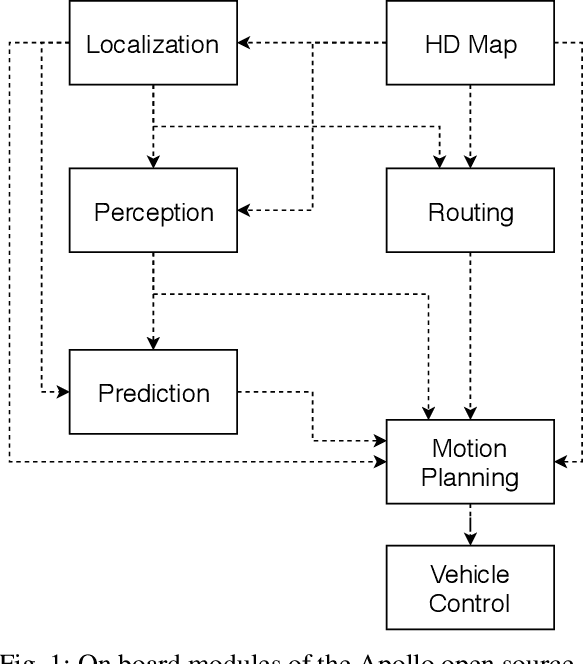
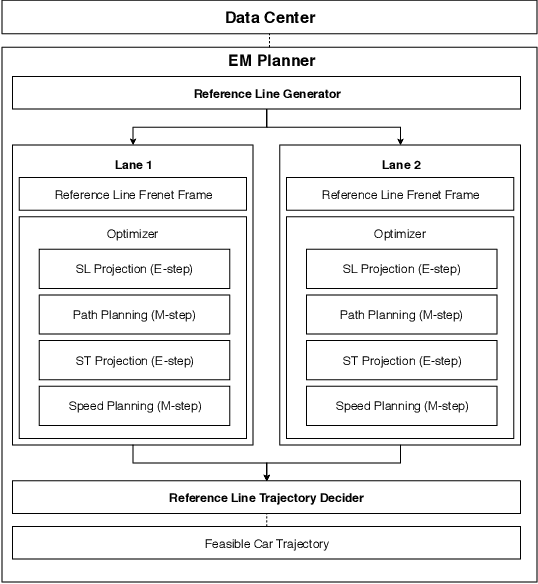
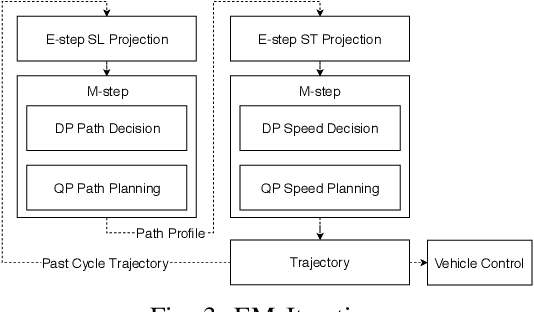

In this manuscript, we introduce a real-time motion planning system based on the Baidu Apollo (open source) autonomous driving platform. The developed system aims to address the industrial level-4 motion planning problem while considering safety, comfort and scalability. The system covers multilane and single-lane autonomous driving in a hierarchical manner: (1) The top layer of the system is a multilane strategy that handles lane-change scenarios by comparing lane-level trajectories computed in parallel. (2) Inside the lane-level trajectory generator, it iteratively solves path and speed optimization based on a Frenet frame. (3) For path and speed optimization, a combination of dynamic programming and spline-based quadratic programming is proposed to construct a scalable and easy-to-tune framework to handle traffic rules, obstacle decisions and smoothness simultaneously. The planner is scalable to both highway and lower-speed city driving scenarios. We also demonstrate the algorithm through scenario illustrations and on-road test results. The system described in this manuscript has been deployed to dozens of Baidu Apollo autonomous driving vehicles since Apollo v1.5 was announced in September 2017. As of May 16th, 2018, the system has been tested under 3,380 hours and approximately 68,000 kilometers (42,253 miles) of closed-loop autonomous driving under various urban scenarios. The algorithm described in this manuscript is available at https://github.com/ApolloAuto/apollo/tree/master/modules/planning.