 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutoPP: Towards Automated Product Poster Generation and Optimization
Dec 26, 2025Product posters blend striking visuals with informative text to highlight the product and capture customer attention. However, crafting appealing posters and manually optimizing them based on online performance is laborious and resource-consuming. To address this, we introduce AutoPP, an automated pipeline for product poster generation and optimization that eliminates the need for human intervention. Specifically, the generator, relying solely on basic product information, first uses a unified design module to integrate the three key elements of a poster (background, text, and layout) into a cohesive output. Then, an element rendering module encodes these elements into condition tokens, efficiently and controllably generating the product poster. Based on the generated poster, the optimizer enhances its Click-Through Rate (CTR) by leveraging online feedback. It systematically replaces elements to gather fine-grained CTR comparisons and utilizes Isolated Direct Preference Optimization (IDPO) to attribute CTR gains to isolated elements. Our work is supported by AutoPP1M, the largest dataset specifically designed for product poster generation and optimization, which contains one million high-quality posters and feedback collected from over one million users. Experiments demonstrate that AutoPP achieves state-of-the-art results in both offline and online settings. Our code and dataset are publicly available at: https://github.com/JD-GenX/AutoPP
AI-Driven Prediction of Cancer Pain Episodes: A Hybrid Decision Support Approach
Dec 18, 2025Lung cancer patients frequently experience breakthrough pain episodes, with up to 91% requiring timely intervention. To enable proactive pain management, we propose a hybrid machine learning and large language model pipeline that predicts pain episodes within 48 and 72 hours of hospitalization using both structured and unstructured electronic health record data. A retrospective cohort of 266 inpatients was analyzed, with features including demographics, tumor stage, vital signs, and WHO-tiered analgesic use. The machine learning module captured temporal medication trends, while the large language model interpreted ambiguous dosing records and free-text clinical notes. Integrating these modalities improved sensitivity and interpretability. Our framework achieved an accuracy of 0.874 (48h) and 0.917 (72h), with an improvement in sensitivity of 8.6% and 10.4% due to the augmentation of large language model. This hybrid approach offers a clinically interpretable and scalable tool for early pain episode forecasting, with potential to enhance treatment precision and optimize resource allocation in oncology care.
Personalized Treatment Outcome Prediction from Scarce Data via Dual-Channel Knowledge Distillation and Adaptive Fusion
Oct 30, 2025Personalized treatment outcome prediction based on trial data for small-sample and rare patient groups is critical in precision medicine. However, the costly trial data limit the prediction performance. To address this issue, we propose a cross-fidelity knowledge distillation and adaptive fusion network (CFKD-AFN), which leverages abundant but low-fidelity simulation data to enhance predictions on scarce but high-fidelity trial data. CFKD-AFN incorporates a dual-channel knowledge distillation module to extract complementary knowledge from the low-fidelity model, along with an attention-guided fusion module to dynamically integrate multi-source information. Experiments on treatment outcome prediction for the chronic obstructive pulmonary disease demonstrates significant improvements of CFKD-AFN over state-of-the-art methods in prediction accuracy, ranging from 6.67\% to 74.55\%, and strong robustness to varying high-fidelity dataset sizes. Furthermore, we extend CFKD-AFN to an interpretable variant, enabling the exploration of latent medical semantics to support clinical decision-making.
Baidu Apollo EM Motion Planner
Jul 20, 2018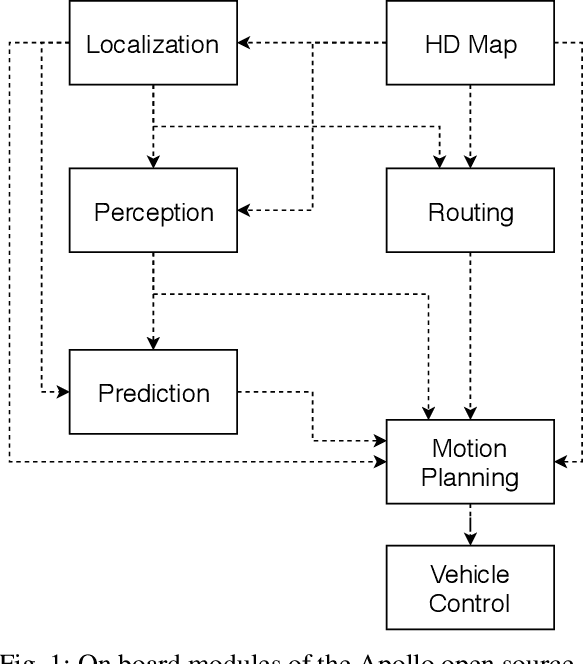
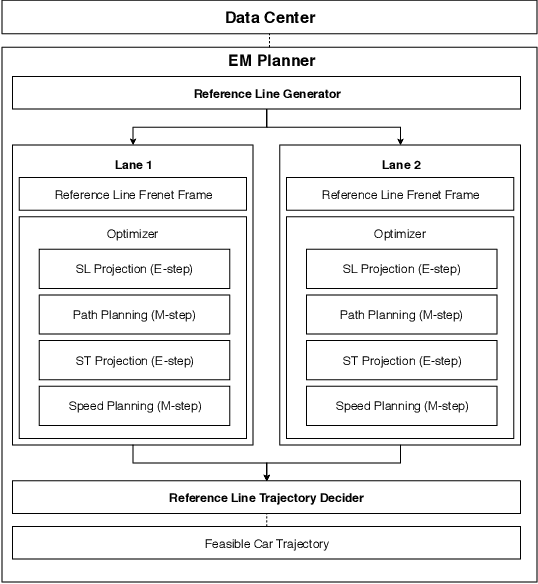
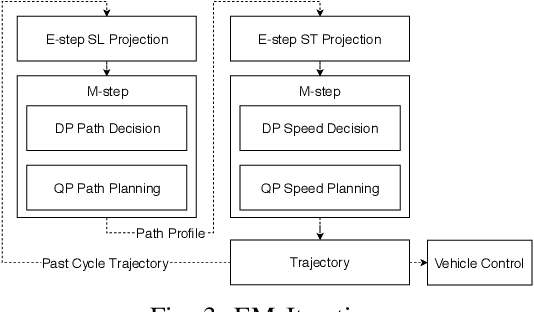

In this manuscript, we introduce a real-time motion planning system based on the Baidu Apollo (open source) autonomous driving platform. The developed system aims to address the industrial level-4 motion planning problem while considering safety, comfort and scalability. The system covers multilane and single-lane autonomous driving in a hierarchical manner: (1) The top layer of the system is a multilane strategy that handles lane-change scenarios by comparing lane-level trajectories computed in parallel. (2) Inside the lane-level trajectory generator, it iteratively solves path and speed optimization based on a Frenet frame. (3) For path and speed optimization, a combination of dynamic programming and spline-based quadratic programming is proposed to construct a scalable and easy-to-tune framework to handle traffic rules, obstacle decisions and smoothness simultaneously. The planner is scalable to both highway and lower-speed city driving scenarios. We also demonstrate the algorithm through scenario illustrations and on-road test results. The system described in this manuscript has been deployed to dozens of Baidu Apollo autonomous driving vehicles since Apollo v1.5 was announced in September 2017. As of May 16th, 2018, the system has been tested under 3,380 hours and approximately 68,000 kilometers (42,253 miles) of closed-loop autonomous driving under various urban scenarios. The algorithm described in this manuscript is available at https://github.com/ApolloAuto/apollo/tree/master/modules/planning.