 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeProgramming Autonomous Machines
Sep 06, 2022
One key technical challenge in the age of autonomous machines is the programming of autonomous machines, which demands the synergy across multiple domains, including fundamental computer science, computer architecture, and robotics, and requires expertise from both academia and industry. This paper discusses the programming theory and practices tied to producing real-life autonomous machines, and covers aspects from high-level concepts down to low-level code generation in the context of specific functional requirements, performance expectation, and implementation constraints of autonomous machines.
The Promise of Dataflow Architectures in the Design of Processing Systems for Autonomous Machines
Sep 15, 2021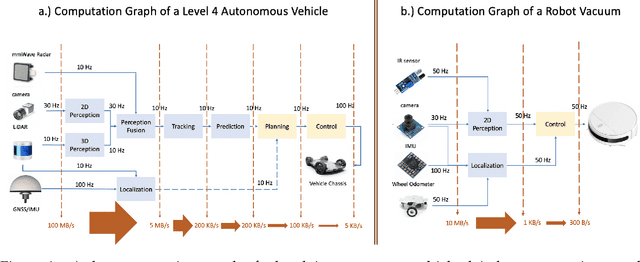
The commercialization of autonomous machines is a thriving sector, and likely to be the next major computing demand driver, after PC, cloud computing, and mobile computing. Nevertheless, a suitable computer architecture for autonomous machines is missing, and many companies are forced to develop ad hoc computing solutions that are neither scalable nor extensible. In this article, we analyze the demands of autonomous machine computing, and argue for the promise of dataflow architectures in autonomous machines.
Rise of the Autonomous Machines
Jun 26, 2021
After decades of uninterrupted progress and growth, information technology has so evolved that it can be said we are entering the age of autonomous machines, but there exist many roadblocks in the way of making this a reality. In this article, we make a preliminary attempt at recognizing and categorizing the technical and non-technical challenges of autonomous machines; for each of the ten areas we have identified, we review current status, roadblocks, and potential research directions. It is hoped that this will help the community define clear, effective, and more formal development goalposts for the future.
Engineering Education in the Age of Autonomous Machines
Feb 16, 2021In the past few years, we have observed a huge supply-demand gap for autonomous driving engineers. The core problem is that autonomous driving is not one single technology but rather a complex system integrating many technologies, and no one single academic department can provide comprehensive education in this field. We advocate to create a cross-disciplinary program to expose students with technical background in computer science, computer engineering, electrical engineering, as well as mechanical engineering. On top of the cross-disciplinary technical foundation, a capstone project that provides students with hands-on experiences of working with a real autonomous vehicle is required to consolidate the technical foundation.
Autonomous Last-mile Delivery Vehicles in Complex Traffic Environments
Jan 22, 2020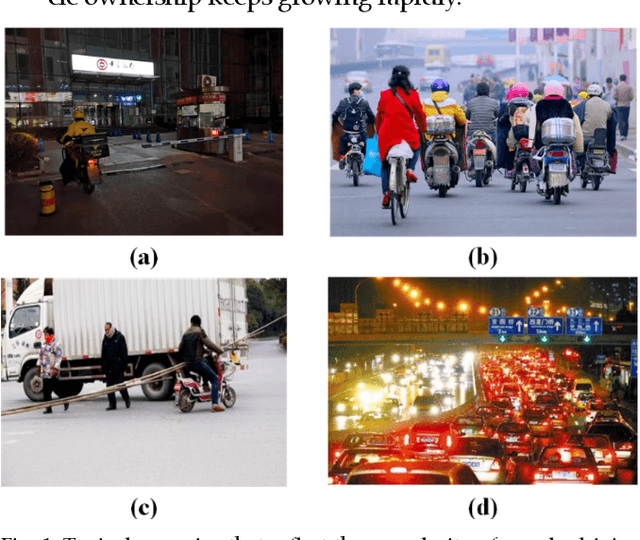
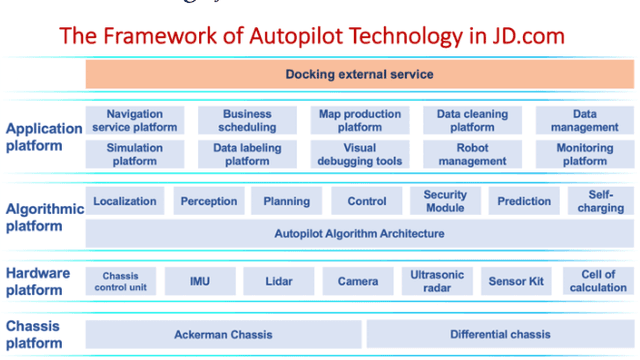
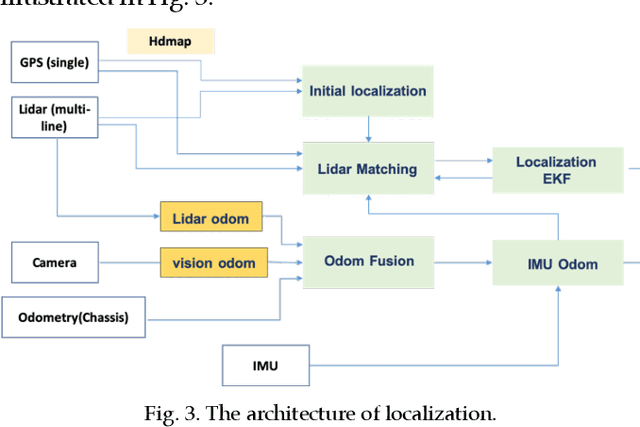
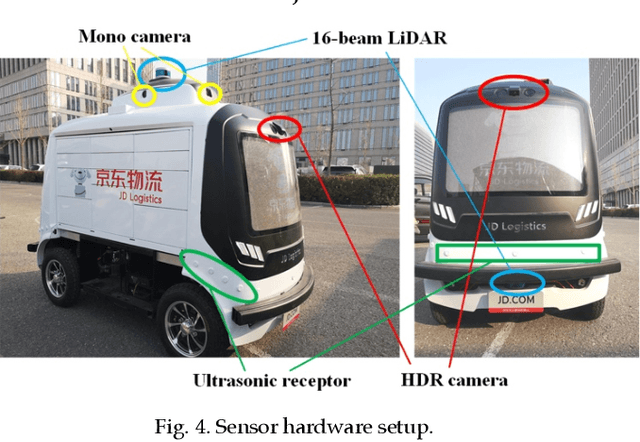
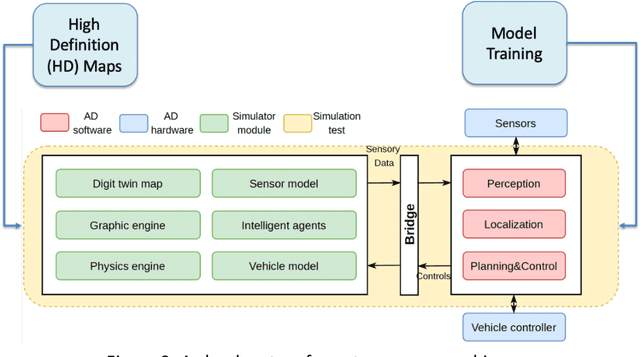
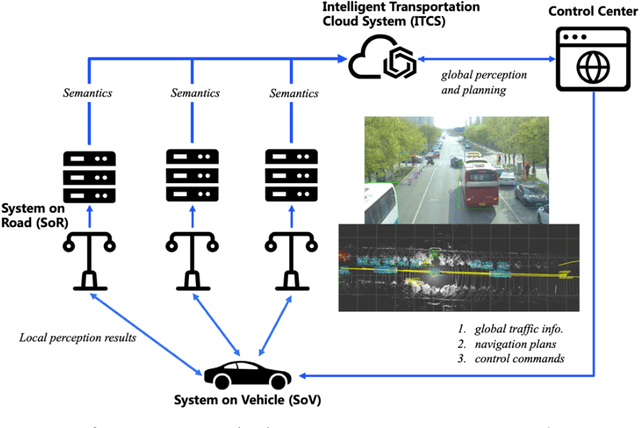
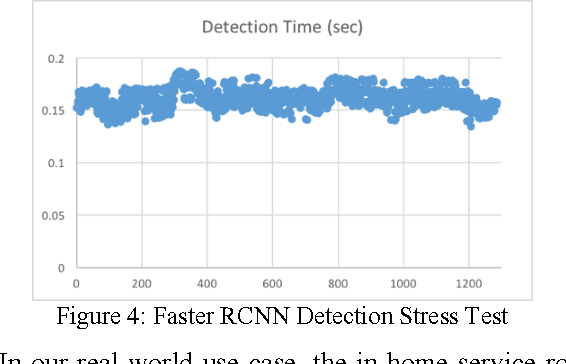
E-commerce has evolved with the digital technology revolution over the years. Last-mile logistics service contributes a significant part of the e-commerce experience. In contrast to the traditional last-mile logistics services, smart logistics service with autonomous driving technologies provides a promising solution to reduce the delivery cost and to improve efficiency. However, the traffic conditions in complex traffic environments, such as those in China, are more challenging compared to those in well-developed countries. Many types of moving objects (such as pedestrians, bicycles, electric bicycles, and motorcycles, etc.) share the road with autonomous vehicles, and their behaviors are not easy to track and predict. This paper introduces a technical solution from JD.com, a leading E-commerce company in China, to the autonomous last-mile delivery in complex traffic environments. Concretely, the methodologies in each module of our autonomous vehicles are presented, together with safety guarantee strategies. Up to this point, JD.com has deployed more than 300 self-driving vehicles for trial operations in tens of provinces of China, with an accumulated 715,819 miles and up to millions of on-road testing hours.
Teaching Autonomous Driving Using a Modular and Integrated Approach
Feb 27, 2018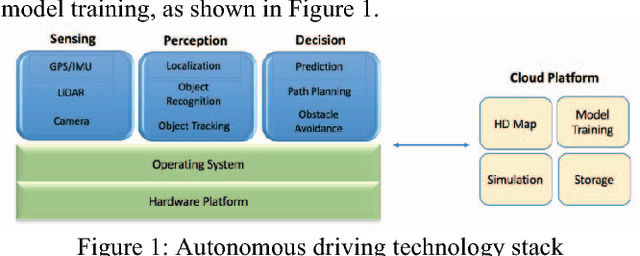
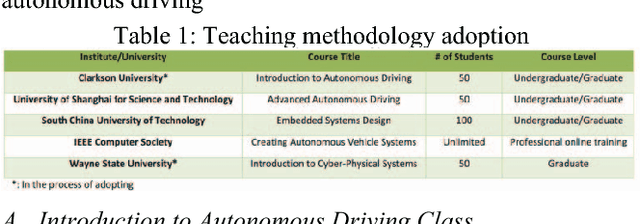
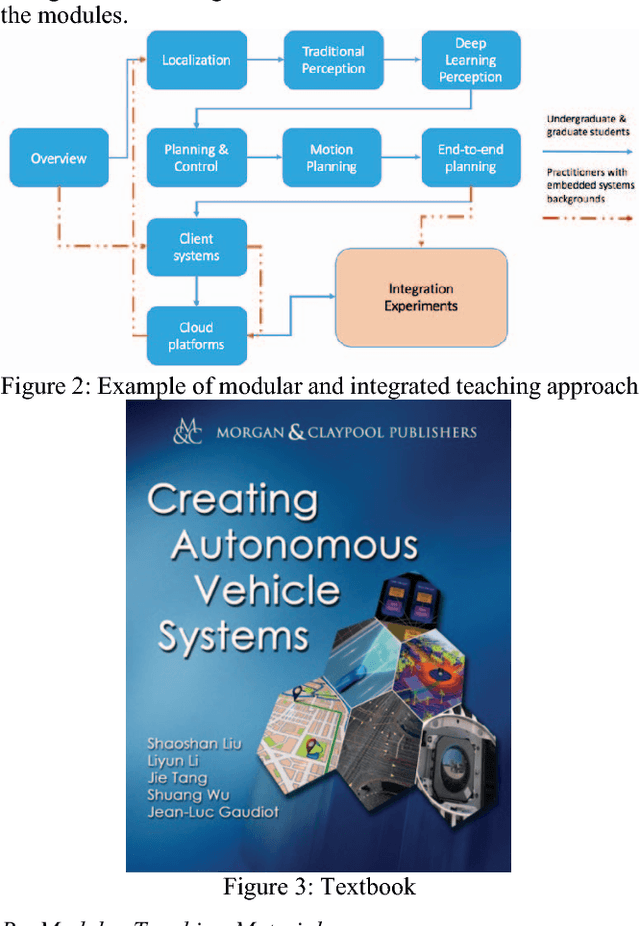
Autonomous driving is not one single technology but rather a complex system integrating many technologies, which means that teaching autonomous driving is a challenging task. Indeed, most existing autonomous driving classes focus on one of the technologies involved. This not only fails to provide a comprehensive coverage, but also sets a high entry barrier for students with different technology backgrounds. In this paper, we present a modular, integrated approach to teaching autonomous driving. Specifically, we organize the technologies used in autonomous driving into modules. This is described in the textbook we have developed as well as a series of multimedia online lectures designed to provide technical overview for each module. Then, once the students have understood these modules, the experimental platforms for integration we have developed allow the students to fully understand how the modules interact with each other. To verify this teaching approach, we present three case studies: an introductory class on autonomous driving for students with only a basic technology background; a new session in an existing embedded systems class to demonstrate how embedded system technologies can be applied to autonomous driving; and an industry professional training session to quickly bring up experienced engineers to work in autonomous driving. The results show that students can maintain a high interest level and make great progress by starting with familiar concepts before moving onto other modules.
Learn-Memorize-Recall-Reduce A Robotic Cloud Computing Paradigm
Apr 18, 2017
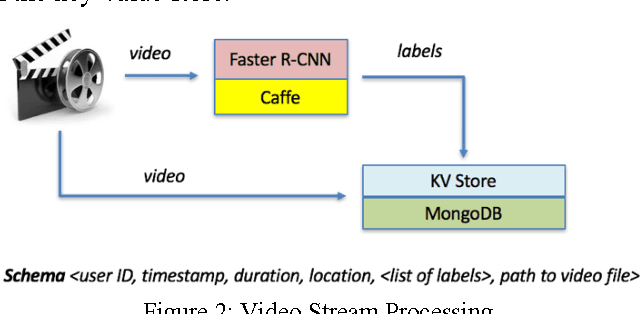
The rise of robotic applications has led to the generation of a huge volume of unstructured data, whereas the current cloud infrastructure was designed to process limited amounts of structured data. To address this problem, we propose a learn-memorize-recall-reduce paradigm for robotic cloud computing. The learning stage converts incoming unstructured data into structured data; the memorization stage provides effective storage for the massive amount of data; the recall stage provides efficient means to retrieve the raw data; while the reduction stage provides means to make sense of this massive amount of unstructured data with limited computing resources.
Enabling Embedded Inference Engine with ARM Compute Library: A Case Study
Apr 14, 2017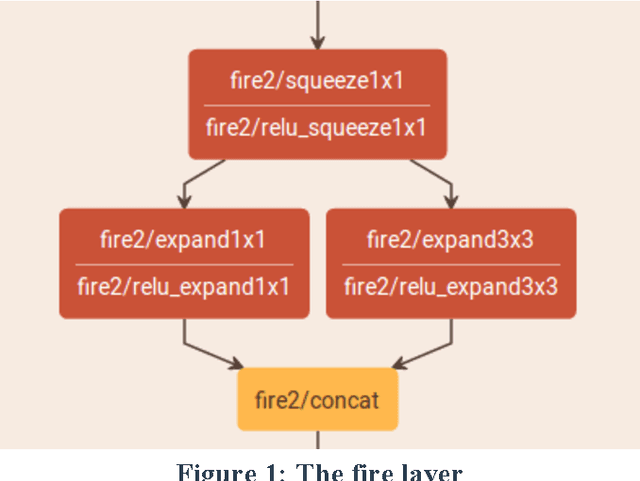
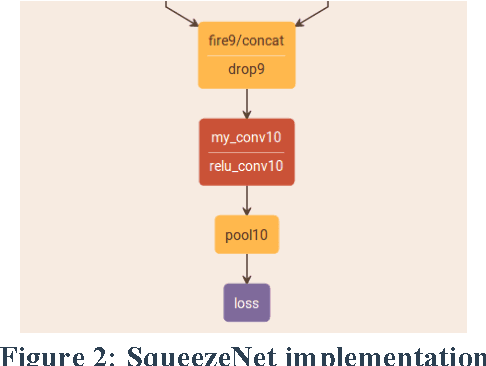
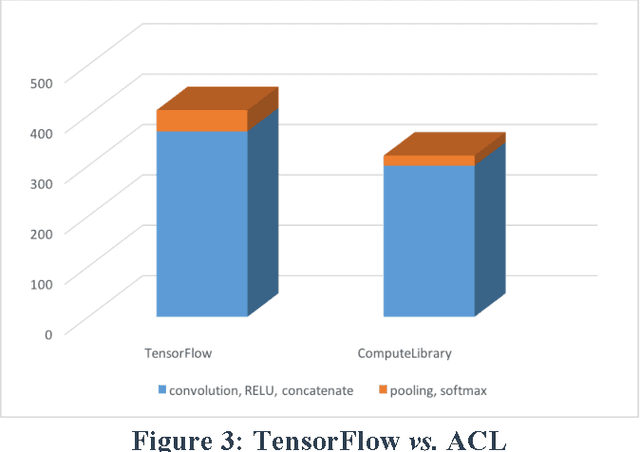
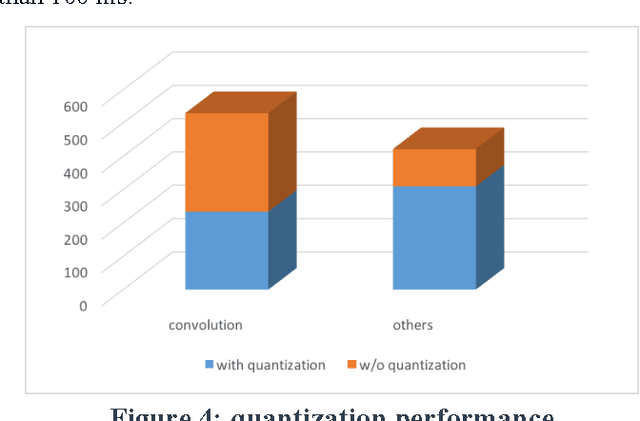
When you need to enable deep learning on low-cost embedded SoCs, is it better to port an existing deep learning framework or should you build one from scratch? In this paper, we share our practical experiences of building an embedded inference engine using ARM Compute Library (ACL). The results show that, contradictory to conventional wisdoms, for simple models, it takes much less development time to build an inference engine from scratch compared to porting existing frameworks. In addition, by utilizing ACL, we managed to build an inference engine that outperforms TensorFlow by 25%. Our conclusion is that, on embedded devices, we most likely will use very simple deep learning models for inference, and with well-developed building blocks such as ACL, it may be better in both performance and development time to build the engine from scratch.
Implementing a Cloud Platform for Autonomous Driving
Apr 10, 2017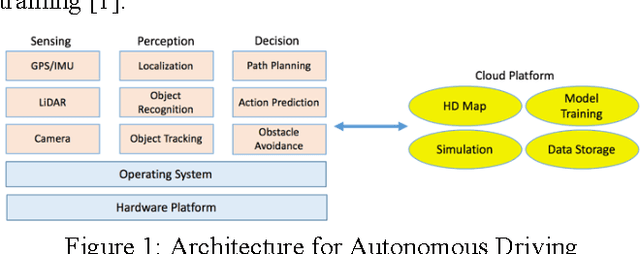
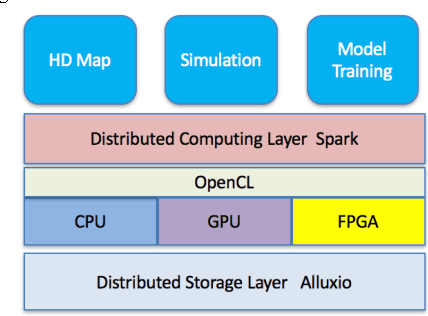
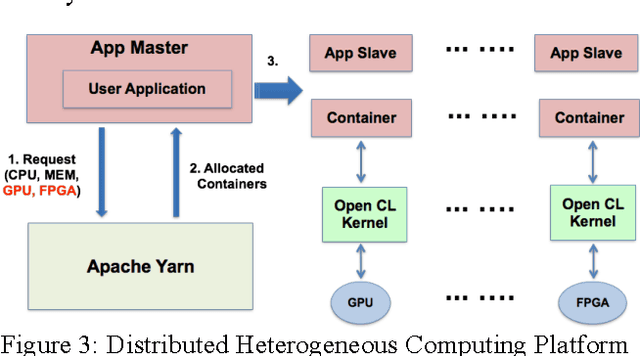
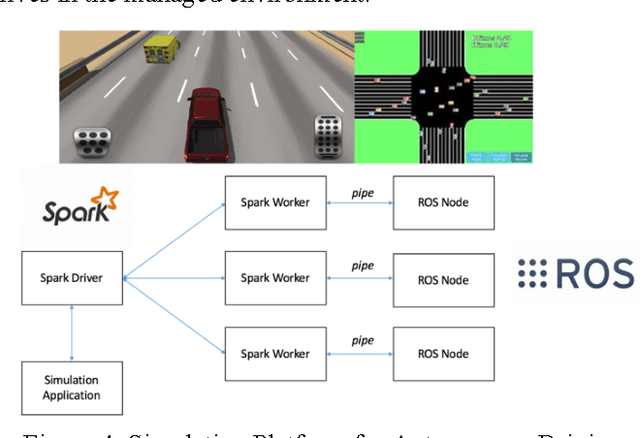
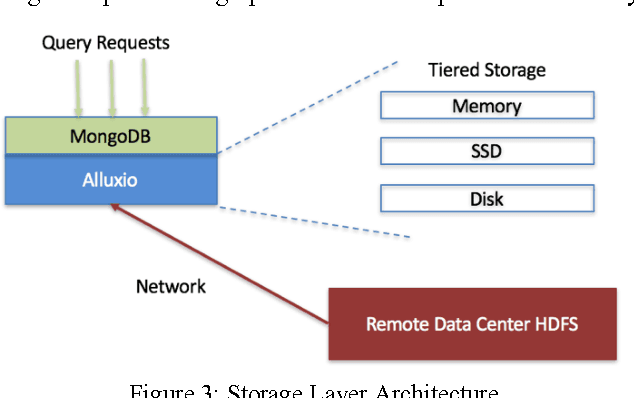
Autonomous driving clouds provide essential services to support autonomous vehicles. Today these services include but not limited to distributed simulation tests for new algorithm deployment, offline deep learning model training, and High-Definition (HD) map generation. These services require infrastructure support including distributed computing, distributed storage, as well as heterogeneous computing. In this paper, we present the details of how we implement a unified autonomous driving cloud infrastructure, and how we support these services on top of this infrastructure.
CAAD: Computer Architecture for Autonomous Driving
Feb 07, 2017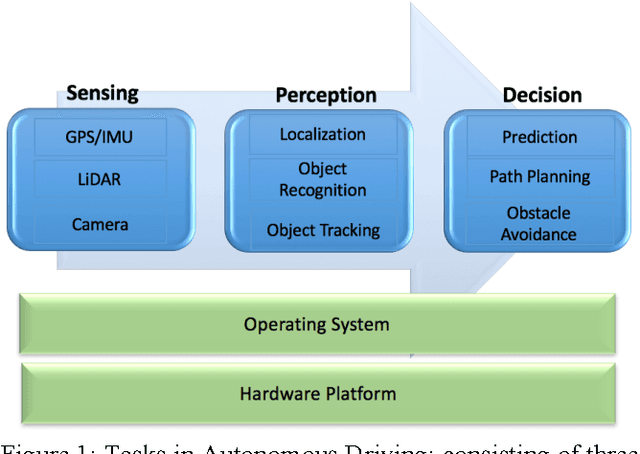
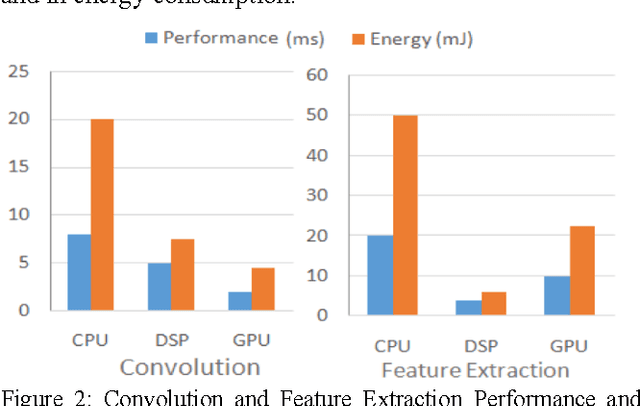
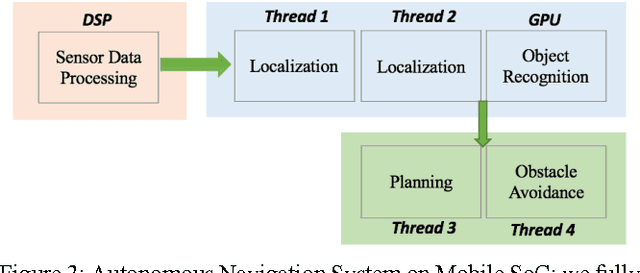
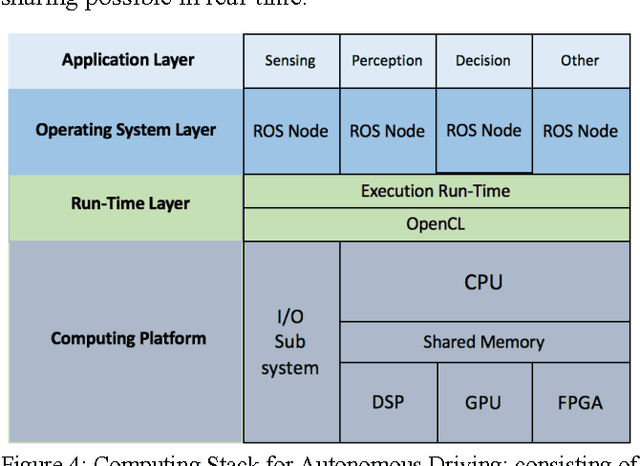
We describe the computing tasks involved in autonomous driving, examine existing autonomous driving computing platform implementations. To enable autonomous driving, the computing stack needs to simultaneously provide high performance, low power consumption, and low thermal dissipation, at low cost. We discuss possible approaches to design computing platforms that will meet these needs.