 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeApolloRL: a Reinforcement Learning Platform for Autonomous Driving
Jan 29, 2022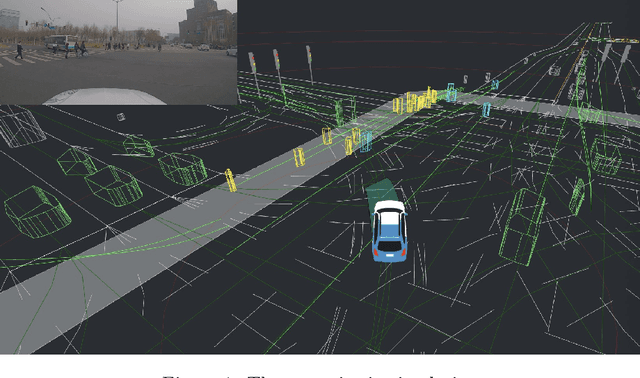
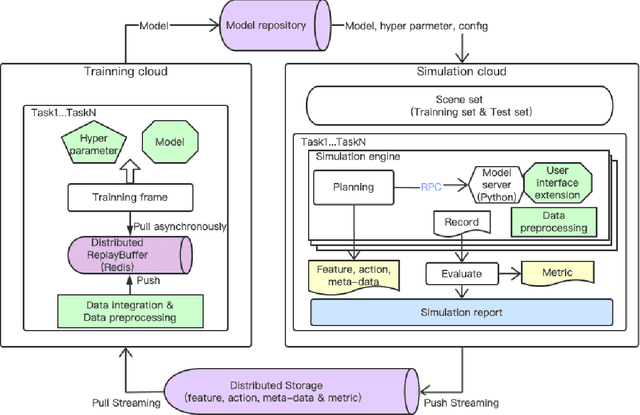
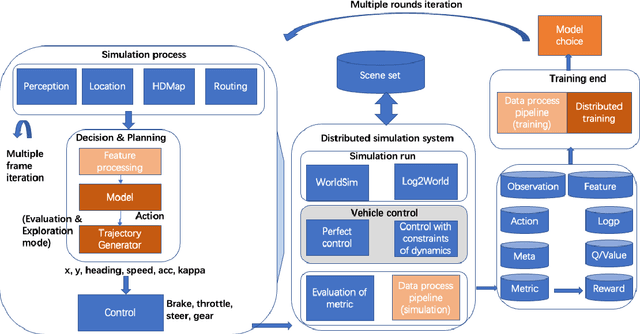
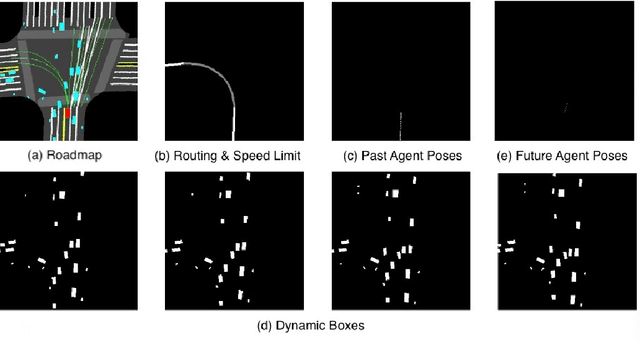
We introduce ApolloRL, an open platform for research in reinforcement learning for autonomous driving. The platform provides a complete closed-loop pipeline with training, simulation, and evaluation components. It comes with 300 hours of real-world data in driving scenarios and popular baselines such as Proximal Policy Optimization (PPO) and Soft Actor-Critic (SAC) agents. We elaborate in this paper on the architecture and the environment defined in the platform. In addition, we discuss the performance of the baseline agents in the ApolloRL environment.
Baidu Apollo Auto-Calibration System - An Industry-Level Data-Driven and Learning based Vehicle Longitude Dynamic Calibrating Algorithm
Aug 30, 2018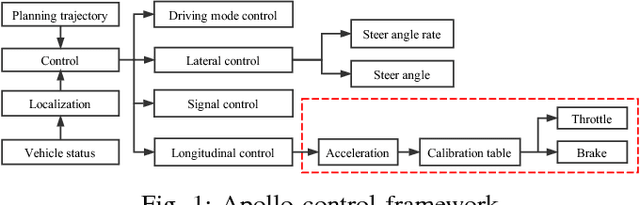
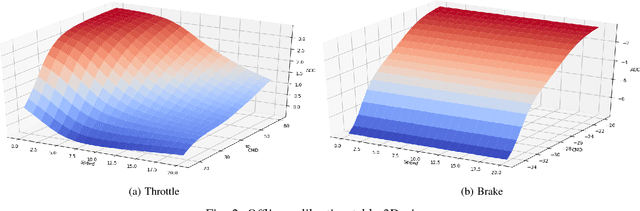
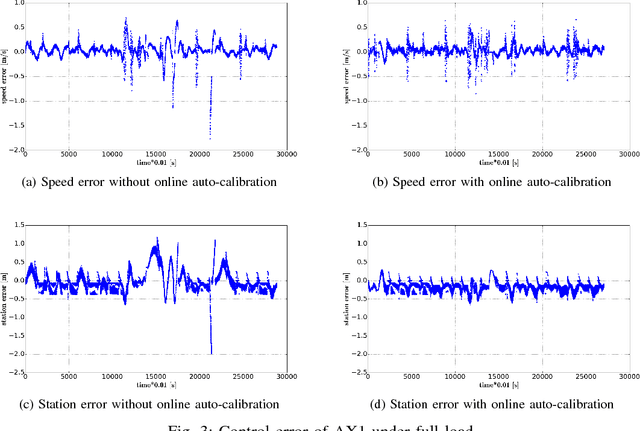
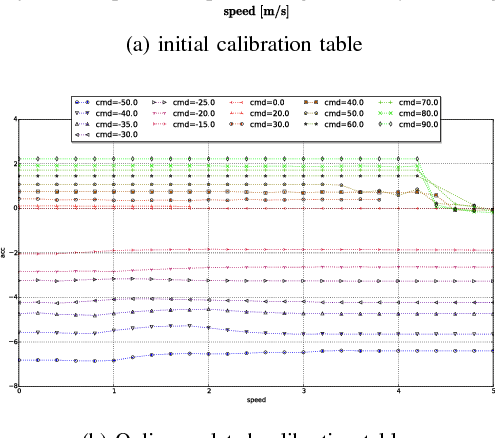
For any autonomous driving vehicle, control module determines its road performance and safety, i.e. its precision and stability should stay within a carefully-designed range. Nonetheless, control algorithms require vehicle dynamics (such as longitudinal dynamics) as inputs, which, unfortunately, are obscure to calibrate in real time. As a result, to achieve reasonable performance, most, if not all, research-oriented autonomous vehicles do manual calibrations in a one-by-one fashion. Since manual calibration is not sustainable once entering into mass production stage for industrial purposes, we here introduce a machine-learning based auto-calibration system for autonomous driving vehicles. In this paper, we will show how we build a data-driven longitudinal calibration procedure using machine learning techniques. We first generated offline calibration tables from human driving data. The offline table serves as an initial guess for later uses and it only needs twenty-minutes data collection and process. We then used an online-learning algorithm to appropriately update the initial table (the offline table) based on real-time performance analysis. This longitudinal auto-calibration system has been deployed to more than one hundred Baidu Apollo self-driving vehicles (including hybrid family vehicles and electronic delivery-only vehicles) since April 2018. By August 27, 2018, it had been tested for more than two thousands hours, ten thousands kilometers (6,213 miles) and yet proven to be effective.