Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeApolloRL: a Reinforcement Learning Platform for Autonomous Driving
Jan 29, 2022
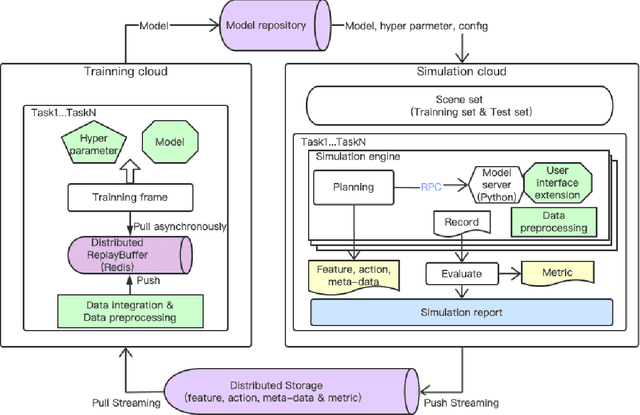
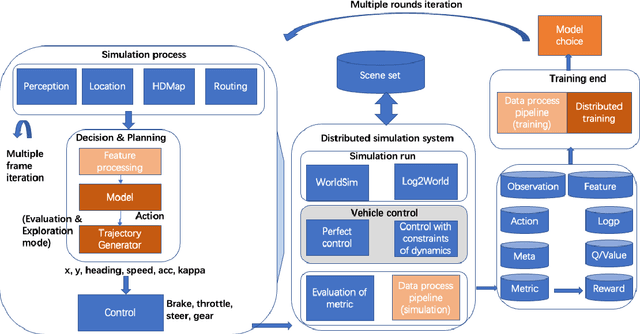
We introduce ApolloRL, an open platform for research in reinforcement learning for autonomous driving. The platform provides a complete closed-loop pipeline with training, simulation, and evaluation components. It comes with 300 hours of real-world data in driving scenarios and popular baselines such as Proximal Policy Optimization (PPO) and Soft Actor-Critic (SAC) agents. We elaborate in this paper on the architecture and the environment defined in the platform. In addition, we discuss the performance of the baseline agents in the ApolloRL environment.
Via